盛衣容器及具有其的衣物处理辅助机器人的制作方法
1.本技术涉及衣物处理领域,尤其涉及一种盛衣容器及具有其的衣物处理辅助机器人。
背景技术:
2.在衣物处理领域,为了降低人们的家务劳动强度,可以采用衣物处理设备进行洗涤、烘干等衣物处理。然而,在衣物处理设备进行相关衣物处理之前,往往需要用户收集丢放在各处的脏衣服后、打开衣物处理设备的门体并放入衣物处理设备,或者拾取之前已经堆放在一起的脏衣物(如盛衣篮内的脏衣物)、打开衣物处理设备的门体并放入衣物处理设备内,然后关闭前述门体,再进行开机操作,选择相应参数进行衣物处理。待衣物处理完毕后,用户再手动打开门体,取出处理后的衣物,去烘干或晾晒,完成整个衣物处理的过程。从整个处理过程而言,收集待处理衣物,送到衣物处理设备处,投放,取出等操作,全部是用户的人为动作,并非自动化操作。
3.相关技术中,可以采用衣物运送机器人将盛衣篮内的脏衣物转移至衣物处理设备处,亟需设计一种适用于衣物转运机器人的盛衣容器。
技术实现要素:
4.有鉴于此,本技术实施例提供了一种盛衣容器及具有其的衣物处理辅助机器人,旨在提升衣物处理的智能化水平。
5.本技术实施例的技术方案是这样实现的:
6.第一方面,本技术实施例提供了一种盛衣容器,所述盛衣容器包括:
7.壁体,所述壁体呈圆筒状;
8.底板,所述底板连接于所述壁体的下端,以密封所述壁体的下端开口,且所述底板呈沿与所述壁体连接的平面向中心处内凹的锥形状。
9.在一些实施方案中,所述锥形状的夹角范围为130~150度。
10.在一些实施方案中,所述盛衣容器还包括:
11.至少一个漫反射传感器,设置于所述底板的内壁面上。
12.在一些实施方案中,所述漫反射传感器的数量为多个,多个所述漫反射传感器沿所述底板的周向均匀间隔布置。
13.在一些实施方案中,各所述漫反射传感器位于所述底板的同一等高面上。
14.在一些实施方案中,所述漫反射传感器的数量为三个。
15.在一些实施方案中,各所述漫反射传感器与所述中心处的间距为3~6厘米。
16.在一些实施方案中,所述壁体的外壁面设置用于固定所述盛衣容器的卡扣件。
17.第二方面,本技术实施例提供了一种衣物处理辅助机器人,包括:装载平台、位移机构、机械臂、控制器及本技术实施例所述的盛衣容器;其中,所述位移机构、所述机械臂、所述控制器及所述盛衣容器均设置于装载平台上,所述位移机构用于在所述控制器的控制
可以包括第一和第二特征直接接触,也可以包括第一和第二特征不是直接接触而是通过它们之间的另外的特征接触。而且,第一特征在第二特征“之上”、“上方”和“上面”包括第一特征在第二特征正上方和斜上方,或仅仅表示第一特征水平高度高于第二特征。第一特征在第二特征“之下”、“下方”和“下面”包括第一特征在第二特征正下方和斜下方,或仅仅表示第一特征水平高度小于第二特征。
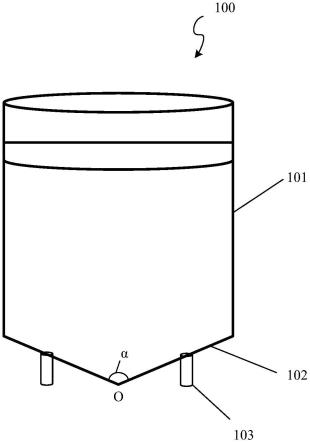
33.第一方面,本技术实施例提供了一种盛衣容器100,如图1所示,该盛衣容器100包括:壁体101和底板102。其中,壁体101呈圆筒状;底板102连接于壁体101的下端,以密封壁体101的下端开口,且底板102呈沿与壁体101连接的平面向中心处o内凹的锥形状。
34.需要说明的是,本技术实施例的盛衣容器100,圆筒状的壁体101便于衣物处理辅助机器人的机械臂的拾取,即机械臂可以无死角地拾取圆筒状的壁体101。此外,采用锥形状的底板102,可以使得盛衣容器100内的衣物能够在重力作用下滑落至底部,可以有效避免转运过程中衣物的滑出,利于提升衣物自动转运的可靠性。
35.示例性地,如图1所示,锥形状的夹角α范围为130~150度。
36.这里,锥形状的夹角α可以理解为沿底板102沿纵向的剖面在中心处o形成的夹角。
37.需要说明的是,夹角α若太小,则衣物在底部很难被机械臂抓取;若夹角α太大,则衣物可能难以在重力作用下滑落至底部,基于此,本技术实施例的夹角α范围为130~150度。优选地,夹角α为140度。
38.在一些实施例中,盛衣容器100还包括:至少一个漫反射传感器103,设置于底板102的内壁面上。
39.这里,漫反射传感器103是指基于漫反射原理检测盛衣容器100内是否存在衣物的光电传感器。该漫反射原理是指:物体表面凹凸不平,相当于无数角度不同的小平面镜,将入射光看作平行光,入射方向相同,但因为各个小平面镜角度不一,所以反射光线角度不一,这样在各个方向上都可见反射光线了。漫反射传感器103可以将光发射器和光接收器集成,当盛衣容器100内存在衣物时,将光发射器发射的足够量的光线反射到光接收器,于是光接收器就产生了开关信号,指示盛衣容器100内存在衣物。如此,可以基于本技术实施例的漫反射传感器103,盛衣容器100可以自动检测内部是否存在衣物,利于提升衣物转运的智能化水平,例如,衣物辅助机器人可以基于漫反射传感器103生成的信号,判断盛衣容器100内的衣物是否已被全部取出。
40.在一些实施例中,漫反射传感器103的数量为多个,多个漫反射传感器103沿底板102的周向均匀间隔布置。
41.可以理解的是,通过在底板102的周向均匀间隔布置多个漫反射传感器103,能够全面覆盖盛衣容器100内部的检测区域,使得基于漫反射传感器103,能够准确地检测盛衣容器100内是否存在衣物。
42.示例性地,各漫反射传感器位于底板102的同一等高面上,即多个漫反射传感器103与底板102的中心处o的距离均相等,从而可以在该等高面上实现全区域的衣物检测,有效避免衣物漏检,进而提高衣物检测结果的准确度。
43.示例性地,如图2所示,漫反射传感器103的数量为三个,三个漫反射传感器103沿周向间隔120度设置。如此,既能满足全区域的衣物检测需求,又能合理降低硬件成本。
44.示例性地,如图2所示,各漫反射传感器103与中心处o的间距l为3~6厘米。
45.实际应用中,盛衣容器100内的衣物最容易堆积在距离中心处o 3~6厘米的区域,将各漫反射传感器103设置在上述区域,可以有效提高衣物识别的准确度。优选地,3个漫反射传感器103均匀分布在靠近中心处o 5厘米的圆弧上。
46.示例性地,壁体101的外壁面设置用于固定盛衣容器100的卡扣件。示例性地,该卡扣件可以为设置于壁体101的外壁面上的挂钩,如此,盛衣容器100可以经挂钩固定于衣物处理辅助机器人的装载平台上。
47.本技术实施例还提供了一种衣物处理辅助机器人,如图3所示,该衣物处理辅助机器人200包括:装载平台201、位移机构202、机械臂203、控制器(图中未示出)及本技术实施例的盛衣容器100;其中,位移机构202、机械臂203、控制器及盛衣容器100均设置于装载平台201上,位移机构202用于在控制器的控制下带动装载平台201位移,机械臂203用于在控制器的控制下将衣物转入至盛衣容器100内或者将盛衣容器100内的衣物移出。
48.可以理解的是,衣物处理辅助机器人200可以经机械臂203将盛衣容器100拾取并固定至装载平台201上,控制器控制位移机构202位移至指定地点后,可以驱动机械臂203拾取衣物至盛衣容器100内,然后位移至衣物处理设备300附近,驱动机械臂203将盛衣容器100内的衣物移出至衣物处理设备300内,直至盛衣容器100内的衣物被全部移出。
49.需要说明的是,衣物处理设备300可以为洗衣机、干衣机或者洗干一体机,本技术实施例对此不做限定。
50.需要说明的是:本技术实施例所记载的技术方案之间,在不冲突的情况下,可以任意组合。
51.以上所述,仅为本技术的具体实施方式,但本技术的保护范围并不局限于此,任何熟悉本技术领域的技术人员在本技术披露的技术范围内,可轻易想到变化或替换,都应涵盖在本技术的保护范围之内。因此,本技术的保护范围应以所述权利要求的保护范围为准。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1