一种固井用电驱型高能混合器及泥浆预混控制方法与流程
1.本发明属于油田固井设备技术领域,涉及一种固井用电驱型高能混合器,本发明还涉及泥浆预混控制方法。
背景技术:
2.作为油田固井施工的核心装备,固井车(橇)已广泛应用于固井作业井场,通常采用单台或多台组合施工的形式开展固井作业。高能混合器是固井车(橇)上泥浆混配系统的核心部件。固井车(橇)的泥浆混配系统由水泵供应的清水和灰罐车供应的干灰在高能混合器中进行充分的预混之后,进入混配罐,混配罐内搅拌器的持续搅拌使泥浆均匀混合,同时,循环泵不断的抽取混配罐内泥浆进入高能混合器进行二次混浆,进一步提高泥浆的均匀性。
3.高能混合器的水灰调节和预混控制能力是整个固井车(橇)的关键技术,目前,水阀阀芯和灰阀阀芯的调节主要采用液压驱动的形式;传统高能混合器泥浆预混控制方法中往往需要用户输入水阀和灰阀的开度
‑
流量关系,再根据实时密度和液位进行泥浆流量和密度的调节,开度
‑
流量关系受施工作业环境的影响较大。尤其是受到灰罐车剩余灰量、灰罐车内压力、输灰管线尺寸规格、输灰管线高度等影响,其开度
‑
流量关系是一个无规律变化的值。在固井作业过程中,控制方法是根据作业之前用户输入的水阀和灰阀的开度
‑
流量关系进行闭环运算,然而这样的水阀和灰阀的开度
‑
流量关系无法根据现场施工作业情况进行实施调整,自动作业模式下的泥浆预混效果不能满足实际需求。
4.现有的液压驱动型高能混合器及预混控制方法存在如下问题:1)系统响应速度慢。由于摆动液缸的密封件和机械限制,阀芯的最大转动角速度不得超过60
°
/s,导致水阀和灰阀阀芯的开度无法随着泥浆流量和密度的变化进行实时调整,泥浆预混控制滞后性较大,再加上高能混合器附近无法就近安装整套液压系统,液压源和控制阀往往采用远程布置,过长的管线进一步限制了液压系统响应速度的提高。2)泥浆预混效果较差。由于采用固定的水阀和灰阀开度
‑
流量关系,自动作业模式下水量和灰量的实时调整精度不高,且由于一个液压回路供应两个伺服阀,通常无法实现水阀和灰阀的同时控制,对整个作业工况的适应性较差。3)经济效益不佳。国内高端液压元器件供应商较少,摆动缸和伺服液压系统的采购成本较高,供货周期长,对于量产之后的成本控制有较大的考验,伺服液压系统对旋转精度控制较好,但对旋转速度的控制无法进一步提高,投入与收益比不高。4)维护不便。伺服液压系统对于油液清洁度要求较高,增加了现场的使用和维护成本。
5.随着对页岩气等非常规能源开发的需求增大,对于提高固井车(橇)在固井泥浆质量、降低整车成本、减小维护投入等方面的要求也越来越高,所以研制更高性能、低成本和维护便利的固井高能混合器及其预混控制方法显得尤为迫切。
技术实现要素:
6.本发明的目的是提供一种固井用电驱型高能混合器,解决了现有技术中存在的液
压驱动型高能混合器响应慢、泥浆预混效果较差、成本高的问题。
7.本发明的另一目的是提供泥浆预混控制方法。解决了现有技术中存在的自动作业模式下的泥浆预混效果差的问题。
8.本发明所采用的一种技术方案是一种固井用电驱型高能混合器,包括灰阀主体,灰阀主体底部通过连接由壬安装有混合器腔体,混合器腔体侧面固接有水阀主体,混合器腔体本体安装有法兰盘,法兰盘位于水阀主体下方,混合器腔体底部设置有锥盘。
9.本发明的特点还在于:
10.灰阀主体上安装有灰阀减速机,灰阀减速机的驱动轴与灰阀主体内的灰阀阀芯一侧相连接,灰阀减速机安装有灰阀伺服电机,灰阀阀芯的另一侧集成有灰阀角度传感器。
11.水阀主体上安装有水阀减速机,水阀减速机的驱动轴与水阀主体内的水阀阀芯一侧相连接,水阀减速机安装有水阀伺服电机,水阀阀芯的另一侧集成有水阀角度传感器。
12.灰阀减速机和水阀减速机均为直角减速机。
13.混合器腔体底部外侧沿其周向均匀且垂直设置有至少4个连杆,4个连杆分别与锥盘的外侧固接。
14.本发明所采用的另一种技术方案是泥浆预混控制方法,采用高能混合器,高能混合器安装在混配罐内,混配罐上依次安装有液位计和搅拌器,混配罐上分别设置有泵吸入口和二次混浆吸入口,泵吸入口通过管道依次连接有灌注泵和固井泵,二次混浆吸入口通过管道依次连接有循环泵和密度计,密度计通过管道与高能混合器的二次混浆口相连接;高能混合器的进水口安装有清水流量计,高能混合器的灰阀阀芯下部安装有复位弹簧;
15.搅拌器、灌注泵、循环泵、固井泵、密度计、液位计、清水流量计和高能混合器均与本地操作台相连接。
16.本发明的特点还在于:
17.搅拌器设置有至少2个;本地操作台包括中央处理器,中央处理器分别连接有操作面板、水阀伺服驱动器和灰阀伺服驱动器。
18.混配罐泥浆液位控制具体按照以下步骤实施:
19.步骤s01、开启本地操作台,用户在操作面板上设定泥浆流量q
泥设
和泥浆密度ρ
泥设
,根据预设程序计算出高能混合器的理论进水量q
水理论
;
20.步骤s02、进入手动模式,操作人员根据现有的混配罐泥浆液位和固井泵的转速手动调整水阀的开度,待液位稳定后,结束手动模式,切换至自动混配罐泥浆液位控制模式;
21.步骤s03、根据理论进水量q
水理论
、水阀阀芯的实际角度θ
水实
、清水流量计反馈的实际流量q
水实
三者之间的线性关系计算出要满足理论进水量q
水理论
的水阀阀芯的理论角度θ
水理论
;
22.步骤s04、将水阀阀芯的实际角度θ
水实
与理论角度θ
水理论
求差之后,带入中央处理器中进行pid运算,为水阀伺服驱动器提供控制信号;
23.步骤s05、水阀伺服驱动器根据水阀伺服电机带动水阀阀芯转动之后的位置反馈进行闭环运算,驱动水阀阀芯转动至理论角度θ
水理论
;
24.步骤s06、为了确保液位的稳定,根据液位情况对进水量实时修正,根据混配罐设定液位l
泥设
和实际液位l
实
之差,计算出修正清水流量q
水修
;
25.步骤s07、在清水理论流量q
水理论
和实际流量q
水实
求差时减去修正清水流量q
水修
,得到修正之后的理论水阀阀芯的角度θ
理论
。
26.泥浆密度控制具体按照以下步骤实施:
27.步骤s1、开启本地操作台,根据用户设定的泥浆流量q
泥设
和密度ρ
泥设
计算出高能混合器的理论进灰量q
灰理论
,并根据清水流量计反馈的清水实际流量q
水实
以及密度计反馈的泥浆实际密度ρ
泥实
计算出实际的进灰量q
灰实
;
28.步骤s2、进入手动模式,操作人员根据现有的泥浆密度情况手动调整灰阀的开度,待泥浆密度稳定后,结束手动模式,进入自动泥浆密度控制模式;
29.步骤s3、根据灰阀阀芯的实际角度θ
灰实
、实际进灰量q
灰实
和理论进灰量q
灰理论
三者的线性关系,计算要满足理论进灰量q
灰理论
的灰阀阀芯的理论角度θ
灰理论
;
30.步骤s4、将灰阀阀芯的实际角度θ
灰实
与理论角度θ
灰理论
求差之后,带入中央处理器中进行pid运算,为灰阀伺服驱动器提供控制信号;
31.步骤s5、灰阀伺服驱动器根据灰阀伺服电机带动灰阀阀芯转动之后的位置反馈进行闭环运算,驱动灰阀阀芯10转动至理论角度θ
灰理论
。
32.本发明的有益效果是:
33.(1)本发明一种固井用电驱型高能混合器,采用伺服电机加直角减速机代替摆动液缸,驱动模块直接和水阀及灰阀集成,水阀和灰阀阀芯的另一端安装有角度传感器用于反馈阀芯角度,并优化了混合器结构,使其便于安装和维护;本发明一种固井用电驱型高能混合器,伺服电机驱动的水阀和灰阀阀芯具有高频响、高重复精度、低滞环误差、可同时进行调整的特性,在控制层面上比液压伺服系统具备更多优势,更加适用于固井车泥浆混配工况。
34.(2)本发明泥浆预混控制方法,提出一种自适应混配罐液位和泥浆密度控制方法,通过检测泥浆密度、混配罐液位、清水流量、水灰阀阀芯角度等数据,并和预期的设定数值进行比对,对水阀和灰阀阀芯的开度
‑
流量关系进行实时修正,由此建立一整套泥浆预混控制方法,实现高能混合器泥浆预混的精确控制;本发明泥浆预混控制方法,实现了清水流量和干灰流量的自适应调节,且控制精度高、响应速度快、工况适应性好;本发明泥浆预混控制方法,在提高泥浆预混效果的同时还具有集成度高、维护便利性好的特点,适合大规模的推广使用。
附图说明
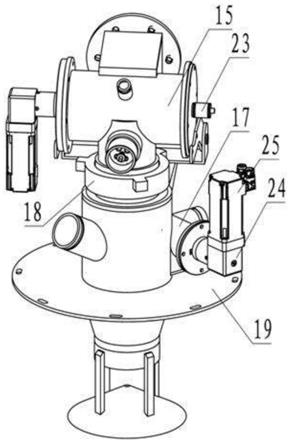
35.图1是本发明一种固井用电驱型高能混合器的结构示意图;
36.图2是本发明一种固井用电驱型高能混合器的侧视图;
37.图3是本发明一种固井用电驱型高能混合器的内部结构的主视图;
38.图4是本发明一种固井用电驱型高能混合器的内部结构的侧视图;
39.图5是本发明泥浆预混控制方法采用的泥浆混配系统的示意图;
40.图6是本发明泥浆预混控制方法的系统硬件示意图;
41.图7是本发明泥浆预混控制方法中混配罐泥浆液位控制的流程示意图;
42.图8是本发明泥浆预混控制方法中泥浆密度控制的流程示意图。
43.图中,1.高能混合器,2.混配罐,3.搅拌器,4.灌注泵,5.循环泵,6.固井泵,7.密度计,8.液位计,9.清水流量计,10.灰阀阀芯,11.水阀阀芯,13.复位弹簧,15.灰阀主体,16.混合器腔体,17.水阀主体,18.连接由壬,19.法兰盘,20.锥盘,21.灰阀减速机,22.灰阀伺
服电机,23.灰阀角度传感器,24.水阀减速机,25.水阀伺服电机,26.水阀角度传感器,27.本地操作台。
具体实施方式
44.下面结合附图和具体实施方式对本发明进行详细说明。
45.本发明提供了一种固井用电驱型高能混合器,如图1、2所示,包括灰阀主体15,灰阀主体15底部通过连接由壬18安装有混合器腔体16,混合器腔体16侧面固接有水阀主体17,混合器腔体16本体安装有法兰盘19,法兰盘19位于水阀主体17下方,混合器腔体16底部设置有锥盘20。锥盘20与混合器腔体16出口的泥浆进行碰撞,起着消除块状干灰颗粒和气泡的作用。
46.优选地,灰阀主体15上安装有灰阀减速机21,灰阀减速机21的驱动轴与灰阀主体15内的灰阀阀芯10一侧相连接,灰阀减速机21安装有灰阀伺服电机22,灰阀阀芯10的另一侧集成有灰阀角度传感器23。
47.优选地,水阀主体17上安装有水阀减速机24,水阀减速机24的驱动轴与水阀主体17内的水阀阀芯11一侧相连接,水阀减速机24安装有水阀伺服电机25,水阀阀芯11的另一侧集成有水阀角度传感器26。如图3所示。
48.灰阀角度传感器23和水阀角度传感器26用于提供阀芯的实时反馈角度,以实现对阀芯角度的精准控制。
49.优选地,灰阀减速机21和水阀减速机24均为直角减速机。
50.优选地,混合器腔体16底部外侧沿其周向均匀且垂直设置有至少4个连杆,4个连杆分别与锥盘20的外侧固接。
51.本发明还提供了泥浆预混控制方法,采用高能混合器1,高能混合器1安装在混配罐2内,混配罐2上依次安装有液位计8和搅拌器3,混配罐2上分别设置有泵吸入口和二次混浆吸入口,泵吸入口通过管道依次连接有灌注泵4和固井泵6,二次混浆吸入口通过管道依次连接有循环泵5和密度计7,密度计7通过管道与高能混合器1的二次混浆口相连接,构成泥浆混配系统,如图5所示;高能混合器1的进水口安装有清水流量计9,高能混合器1的灰阀阀芯10下部安装有复位弹簧13;可防止高能混合器1内部的负压过高,导致水上返堵塞阀芯的情况;
52.搅拌器3、灌注泵4、循环泵5、固井泵6、密度计7、液位计8、清水流量计9和高能混合器1均与本地操作台27相连接。如图4、6所示。
53.优选地,搅拌器3设置有至少2个;本地操作台27包括中央处理器,中央处理器分别连接有操作面板、水阀伺服驱动器和灰阀伺服驱动器。
54.本地操作台27通过接收密度计7、液位计8、清水流量计9和高能混合器1采集的数据,进行闭环运算后驱动水阀伺服电机和灰阀伺服电机运动,控制水阀和灰阀的开度,进而实现混配罐2液位和泥浆密度的自动调节。本地操作台27与中央处理器通过工业以太网进行连接。
55.优选地,如图7所示,混配罐泥浆液位控制具体按照以下步骤实施:
56.步骤s01、开启本地操作台27,用户在操作面板上设定泥浆流量q
泥设
和泥浆密度ρ
泥设
,根据预设程序计算出高能混合器1的理论进水量q
水理论
;
57.步骤s02、进入手动模式,操作人员根据现有的混配罐泥浆液位和固井泵的转速手动调整水阀的开度,待液位稳定后,结束手动模式,切换至自动混配罐泥浆液位控制模式;
58.步骤s03、根据理论进水量q
水理论
、水阀阀芯11的实际角度θ
水实
、清水流量计9反馈的实际流量q
水实
三者之间的线性关系计算出要满足理论进水量q
水理论
的水阀阀芯11的理论角度θ
水理论
;
59.步骤s04、将水阀阀芯11的实际角度θ
水实
与理论角度θ
水理论
求差之后,带入中央处理器中进行pid运算,为水阀伺服驱动器提供控制信号;
60.步骤s05、水阀伺服驱动器根据水阀伺服电机25带动水阀阀芯11转动之后的位置反馈进行闭环运算,驱动水阀阀芯11转动至理论角度θ
水理论
;
61.步骤s06、为了确保液位的稳定,根据液位情况对进水量实时修正,根据混配罐2设定液位l
泥设
和实际液位l
实
之差,计算出修正清水流量q
水修
;
62.步骤s07、在清水理论流量q
水理论
和实际流量q
水实
求差时减去修正清水流量q
水修
,得到修正之后的理论水阀阀芯11的角度θ
理论
。
63.重复步骤s02~步骤s07,中央处理器按照上述方法进行循环数据采集、运算和处理,使高能混合器1的清水量满足设定需求,混配罐2液位保持在用户设定的液位l
泥设
附近。
64.在对泥浆液位进行适宜控制后再进行泥浆的密度控制。
65.优选地,如图8所示,泥浆密度控制具体按照以下步骤实施:
66.步骤s1、开启本地操作台27,根据用户设定的泥浆流量q
泥设
和密度ρ
泥设
计算出高能混合器1的理论进灰量q
灰理论
,并根据清水流量计9反馈的清水实际流量q
水实
以及密度计7反馈的泥浆实际密度ρ
泥实
计算出实际的进灰量q
灰实
;
67.步骤s2、进入手动模式,操作人员根据现有的泥浆密度情况手动调整灰阀的开度,待泥浆密度稳定后,结束手动模式,进入自动泥浆密度控制模式;
68.步骤s3、根据灰阀阀芯10的实际角度θ
灰实
、实际进灰量q
灰实
和理论进灰量q
灰理论
三者的线性关系,计算要满足理论进灰量q
灰理论
的灰阀阀芯10的理论角度θ
灰理论
;
69.步骤s4、将灰阀阀芯10的实际角度θ
灰实
与理论角度θ
灰理论
求差之后,带入中央处理器中进行pid运算,为灰阀伺服驱动器提供控制信号;
70.步骤s5、灰阀伺服驱动器根据灰阀伺服电机22带动灰阀阀芯10转动之后的位置反馈进行闭环运算,驱动灰阀阀芯10转动至理论角度θ
灰理论
。
71.重复步骤s2~步骤s5,中央处理器按照上述方法进行循环数据采集、运算和处理,使混配系统的泥浆达到用户设定的密度ρ
泥设
。
72.本发明泥浆预混控制方法的优点在于:
73.(1)响应速度快。伺服电机的高响应不受电缆长度、安装方式和使用温度的限制,水阀和灰阀旋转速度和旋转精度的得到显著提高。(2)泥浆预混效果好。由于采用的是自适应水阀和灰阀阀芯调整机制,水阀和灰阀的流量
‑
开度关系可以根据作业实际情况自行进行调整,且不需要在作业前输入,配合电驱型高能混合器使用,泥浆预混控制方法适应性更好,高能混合器响应特性和控制精度更佳,泥浆预混效果显著提高。(3)制造成本低。(4)本发明用电驱型高能混合器的集成度高、维护便利性好,采用电控代替液控,省去了液压系统以及相应的管线和阀件,对于提高固井车(橇)的总体集成度、降低使用和维护成本有较大益处。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1