一种前后分体式车辆搬运机器人的制作方法
1.本实用新型属于车辆搬运机器人技术领域,涉及一种停车场用将车辆航运到或搬离停车位的自动化设备,具体地说是一种前后分体式车辆搬运机器人。
背景技术:
2.目前,停车场的单层航运机器人基本上都采用四抓结构,左、右各一个行走臂加中间两根叉臂,通过一个行走臂和一个叉臂的运动将车辆轮胎夹起来通过行走臂的移动实现车辆的搬运。这种机构需要单独为中间的两个叉臂各设计一套移动机构,不仅增加了结构的复杂程度,而且增加重量和制造成本,有必要加以改进。
3.目前已经出现了二爪式车辆搬运机器人,但该机器人的两个叉臂位于车架的两端,占用空间仍然很大。
4.对于空间比较局促的停车位,目前的大型车辆搬运机器人不能进入车辆侧面的缝隙,就不能将车辆搬运到指定位置。同时,对于一些轴距较长或轴距较短的车辆、以及有四个以上车轮的车辆,目前的四爪式或二爪式车辆搬运机器人受到长度和叉臂移动方式等限制,都不能将其搬起。
技术实现要素:
5.鉴于现有技术中存在上述技术问题,本实用新型的目的是针对现有的四爪式或二爪式车辆搬运机器人存在结构冗余,不能搬起轴距较长或较短的车辆等问题,设计一种前后分体式车辆搬运机器人。
6.本实用新型的技术方案如下所述:
7.本实用新型提供一种前后分体式车辆搬运机器人,所述车辆搬运机器人包括多个结构相同的分体机器人,每个分体机器人包括:
8.一车架100,该车架100呈一字形结构;
9.一主动行走装置140,该主动行走装置140安装在车架100的两端上,用于驱动车架100 移动;
10.一结构对称相同的左叉臂200和右叉臂300,左叉臂200和右叉臂300分别安装在车架 100的同一侧,二者之间的距离可调,以使插入一排车轮前方和后方后能作相向运动将一排车轮抬离地面;
11.一万向轮340,该万向轮340安装在左叉臂200和右叉臂300上,以满足车辆搬运机器人的行驶要求。
12.上述技术方案中,采用前后分体机器人协作的方式,将车辆的每排车轮都抬起,就能够实现将车辆搬运到指定位置的目的。不管车辆有多少车轮,或者车辆的轮距多少,采用多个分体机器人,分别抬起每排车轮,就能将车辆抬起,具有非常广泛的应用范围。突破了常规二爪式或四爪式车辆搬运机器人的应用范围。
13.进一步的,所述车架100上与左叉臂200和右叉臂300同侧的中间设有光电感应器
400,用于检测车辆的位置和车辆轮胎距等参数。
14.进一步的,所述左叉臂200和右叉臂300对应轮胎的位置设有轮毂限位座330,所述轮毂限位座330中安装有轮胎托架331。
15.更进一步的,所述轮胎托架331包括滚动组件332、固定块334和弹簧335。所述滚动组件332包括滚动轴套336、滚子轴337和轴架338。所述滚动轴套336套在滚子轴337上,所述滚子轴337排成两排或两排以上安装在轴架338上。所述轴架338包括一个横向支架3381、两个第一纵向支架3382和一个或多个第二纵向支架3383。所述横向支架3381位于滚动组件 332的后侧。所有第一纵向支架3382和第二纵向支架3383相互平行。所述第一纵向支架3382 为两个转动连接的片状结构,分别为第一后侧支架3384和前侧支架3385,所述第二纵向支架3383为两个转动连接的片状结构,分别为第二后侧支架3386和前侧支架3385。第一后侧支架3384位于滚动组件332的左右两侧,第二后侧支架3386位于滚动组件332的中部,且都与横向支架3381固定连接。所述滚子轴337安装在两个纵向支架之间。所述第一纵向支架 3382的第一后侧支架3384端的外侧固定安装有第一固定块3341,其前侧支架3385端的外侧固定安装第三固定块3343,其前侧支架3385靠近转动连接结构的位置的外侧固定安装有第二固定块3342。所述弹簧335的一端固定在第一固定块3341上,并穿过第二固定块3342和第三固定块3343。
16.再进一步的,所述轮胎托架331通过第一后侧支架3384与轮毂限位座330固定连接。再进一步的,全部或者远离横向支架3381的两排或两排以上所述滚动轴套336的直径随着与横向支架3381间的距离增加而逐渐减小。再进一步的,所述轮胎托架331的上表面与左叉臂 200或右叉臂300的上表面之间存在≥10mm的高度差。再进一步的,最外面一排滚动轴套 336为三角形的垫块339。再进一步的,所述横向支架3382为块状结构,所述第一后侧支架 3384和第二后侧支架3386的底部设置了一个或多个横向的固定支架333。
17.更进一步的,所述左叉臂200的辊毂限位座330位于其右侧,右叉臂300的辊毂限位座 330位于其左侧,将车辆抬离地面时左叉臂200和右叉臂300作相向运动。将车轮抬离地面时,左叉臂200和右叉臂300插入车轮的前方和后方,左叉臂200和右叉臂300作相向运动,将车轮抬离地面。
18.进一步的,所述的左叉臂200和右叉臂300均连接有一个叉臂移动装置310并通过该叉臂移动装置310实现左叉臂200和右叉臂300之间的距离可调,所述的叉臂移动装置310包括移动电机311、l型安装板312、第一导轨滑块机构313、第二导轨滑块机构314和齿条315, l形安装板312与左叉臂200或右叉臂300相连的同时与第一导轨滑块机构313及第二导轨滑块机构314相连,第一导轨滑块机构313及第二导轨滑块机构314固定在车架100上;移动电机311安装在l形安装板312上,移动电机311的输出轴上安装有主动齿轮,主动齿轮与固定在车架110上的齿条相啮合,移动电机311带动主动齿轮转动,主动齿轮与齿条啮合从而带动l形安装板312在车架110上移动。
19.进一步的,所述万向轮340包括轮子341、旋转体344、锥齿轮组345和电机348;所述锥齿轮组345包括水平放置的环状齿轮3451和由电机348驱动的小齿轮3452;所述轮子341 位于旋转体344的中心孔内,且所述旋转体344的内圈和环状齿轮3451内侧分别与轮子341 的轮毂342固定连接,驱动电机348通过带动锥齿轮组345带动轮子341主动转向。
20.更进一步的,所述万向轮340的轮子341安装在轮轴343上,所述轮轴343通过固定
件 349固定安装在轮毂342内,所述旋转体344为交叉滚子轴承,所述交叉滚子轴承的外圈固定在左叉臂200或右叉臂300上,所述电机348通过减速器7驱动小齿轮3452,并安装在电机固定架346上,所述电机固定架346安装在左叉臂200或右叉臂300上,所述锥齿轮组为弧齿螺旋锥齿轮,所述小齿轮3452的中心轴与环状齿轮3451的中心轴的夹角为90
°
。在上述万向轮340使用时,所述旋转体344的外圈固定安装在设备的底座上。电机348未启动时,旋转体344的内圈与外圈相对静止,万向轮不能随意转动。当电机348启动,且电机348带动小齿轮3452转动,小齿轮3452带动环状齿轮3451转动角度α时,环状齿轮3451带动旋转体344的内圈和轮毂342转动角度α,而旋转体344的外圈由于固定在设备底座上,不会发生转动。其中,角度α的范围是0
°
≤α≤360
°
。并且,调整电机348的速率和运行时间可以随意控制α的大小,实现任意方向转动轮子的滚动方向的目的。
21.进一步的,所述的车架100由前板110、后板120以及中间连接件130组成,中间连接件130的位于车架110中部,且其两侧分别与前板110和后板120中部固定连接。
22.本实用新型具有如下有益效果:
23.1、本实用新型采用分体机器人单独搬起一排车轮的方式将车辆抬起,不管车辆有多少车轮,或者车辆的轮距多少,采用多个分体机器人,分别抬起每排车轮,就能将车辆抬起,具有非常广泛的应用范围。突破了常规二爪式或四爪式车辆搬运机器人的应用范围。
24.2、分体机器人的体积小、灵活度高,可以适用于搬运空间较小的停车位上的车辆。
25.3、本实用新型设计的轮胎托架是一种自适应结构,不需要另外设计驱动装置,节约能源,降低成本;
26.4、使用具有尖角的三角形垫块替换最外缘的滚动轴套,能够塞到轮胎与地面的缝隙中,使轮胎能够在尖角面形成的缓坡的辅助下,轻松爬上轮胎托架;
27.5、全部或者远离横向支架的几排所述滚动轴套的直径随着与横向支架间的距离增加而逐渐减小,使抬起轮胎时轮胎需要爬上的坡度更加平缓,从而进一步降低将车辆抬离地面所需的能量。
附图说明
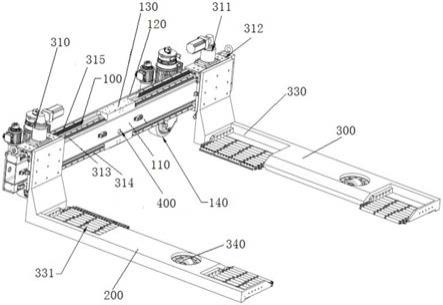
28.图1为本实用新型实施例的分体机器人的立体结构图;
29.图2为本实用新型实施例的分体机器人的一个轮胎托架的立体结构图;
30.图3为本实用新型实施例的分体机器人的拎一个轮胎托架的仰视图;
31.图4为本实用新型实施例的分体机器人的万向轮结构示意图;
32.图5为本实用新型实施例的分体机器人的万向轮的剖视图;
33.其中,100为车架,110为前板,120为后板,130为中间连接件,140为主动行走装置, 200为左叉臂,300为右叉臂,310为叉臂移动装置,311为移动电机,312为l型安装板, 313为第一导轨滑块机构,314为第二导轨滑块机构,315为齿条,330为轮毂限位座,331 为轮胎托架,332为滚动组件,333为固定支架,334为固定块,3341为第一固定块,3342 为第二固定块,3343为第三固定块,335为弹簧,336为滚动轴套,337为滚子轴,338为轴架,3381为横向支架,3382为第一纵向支架,3383为第二纵向支架,3384为第一后侧支架, 3385为前侧支架,3386为第二后侧支架,339为垫块,340为万向轮,341为轮子,342为轮毂,343为轮轴,344为旋转体,345为锥齿轮组,3451为环状齿轮,3452为小齿轮,346为电机固定架,347为减速
器,348为电机,349为固定件,400为光电感应器。
具体实施方式
34.为了更清楚地说明本实用新型的技术方案,下面将结合具体实施例和附图进行说明,显而易见地,下面描述中的实施例仅是本实用新型的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些实施例获得其他的实例。
35.实施例1
36.如图1-5所示,本实施例涉及一种前后分体式车辆搬运机器人,如图1所示,所述车辆搬运机器人包括多个结构相同的分体机器人,每个分体机器人包括:一车架100,该车架100 呈一字形结构;
37.一主动行走装置140,该主动行走装置140安装在车架100的两端上,用于驱动车架100 移动;
38.一结构对称相同的左叉臂200和右叉臂300,左叉臂200和右叉臂300分别安装在车架 100的同一侧,二者之间的距离可调,以使插入一排车轮前方和后方后能作相向运动将一排车轮抬离地面;
39.一万向轮340,该万向轮340安装在左叉臂200和右叉臂300上,以满足车辆搬运机器人的行驶要求。
40.所述车架100上与左叉臂200和右叉臂300同侧的中间设有光电感应器400,用于检测车辆的位置和车辆轮胎距等参数。
41.所述的左叉臂200和右叉臂300与车轮相对位置处各安装有一个轮毂限位座330。如图2 所示,轮毂限位座330内安装有有轮胎托架331。
42.如图2和3所示,所述轮胎托架331包括滚动组件332、固定块334和弹簧335。所述滚动组件332包括滚动轴套336、滚子轴337和轴架338。所述滚动轴套336套在滚子轴337上,所述滚子轴337排成两排或两排以上安装在轴架338上。所述轴架338包括一个横向支架 3381、两个第一纵向支架3382和一个或多个第二纵向支架3383。所述横向支架3381位于滚动组件332的后侧。所有第一纵向支架3382和第二纵向支架3383相互平行。所述第一纵向支架3382为两个转动连接的片状结构,分别为第一后侧支架3384和前侧支架3385,所述第二纵向支架3383为两个转动连接的片状结构,分别为第二后侧支架3386和前侧支架3385。第一后侧支架3384位于滚动组件332的左右两侧,第二后侧支架3386位于滚动组件332的中部,且都与横向支架3381固定连接。所述滚子轴337安装在两个纵向支架之间。所述第一纵向支架3382的第一后侧支架3384端的外侧固定安装有第一固定块3341,其前侧支架3385 端的外侧固定安装第三固定块3343,其前侧支架3385靠近转动连接结构的位置的外侧固定安装有第二固定块3342。所述弹簧335的一端固定在第一固定块3341上,并穿过第二固定块3342和第三固定块3343。所述轮胎托架331通过第一后侧支架3384与轮毂限位座330固定连接。全部或者远离横向支架3381的两排或两排以上所述滚动轴套336的直径随着与横向支架3381间的距离增加而逐渐减小。所述轮胎托架331的上表面与左叉臂200或右叉臂300 的上表面之间存在≥10mm的高度差。最外面一排滚动轴套336为三角形的垫块339。所述横向支架3382为块状结构,所述第一后侧支架3384和第二后侧支架3386的底部设置了一个或多个横向的固定支架333。所示轮胎托架331在使用时,在挤压力的作用下,轮胎托架331 靠近
轮胎的部分向地面方向发生一定偏转(由于前侧支架和后侧支架是以转动连接的,靠近轮胎的前侧支架会受到向下的压力,从而使前侧支架部分向下转动一定角度);轮胎在挤压力的作用下爬到轮胎托架331上,轮胎托架331发生的偏转在弹簧的作用下也恢复一部分,从而使轮胎脱离地面,托起车辆。
43.所述左叉臂200的辊毂限位座330位于其右侧,右叉臂300的辊毂限位座330位于其左侧,将车辆抬离地面时左叉臂200和右叉臂300作相向运动。将车辆抬离地面时,左叉臂200 和右叉臂300插入车辆的车轮的前方和后方,左叉臂200和右叉臂300作相向运动,将两排轮胎都抬离地面。
44.所述的左叉臂200和右叉臂300均连接有一个叉臂移动装置310并通过该叉臂移动装置 310实现左叉臂200和右叉臂300之间的距离可调,所述的叉臂移动装置310包括移动电机 311、l型安装板312、第一导轨滑块机构313、第二导轨滑块机构314和齿条315,l形安装板312与左叉臂200或右叉臂300相连的同时与第一导轨滑块机构313及第二导轨滑块机构 314相连,第一导轨滑块机构313及第二导轨滑块机构314固定在车架100上;移动电机311 安装在l形安装板312上,移动电机311的输出轴上安装有主动齿轮,主动齿轮与固定在车架110上的齿条相啮合,移动电机311带动主动齿轮转动,主动齿轮与齿条啮合从而带动l 形安装板312在车架110上移动。
45.所述的车架100由前板110、后板120以及中间连接件130组成,中间连接件130的位于车架110中部,且其两侧分别与前板110和后板120中部固定连接。
46.如图3和4所示,本实施例所述万向轮340包括轮子341、轮毂342、轮轴343、旋转体 344、锥齿轮组345和电机348。所述轮子341安装在轮轴343上,所述轮轴343通过固定件349固定安装在轮毂342内。所述锥齿轮组345包括水平放置的环状齿轮3451和由电机348 驱动的小齿轮3452。所述轮毂342位于旋转体344的中心孔内,且所述旋转体344的内圈和环状齿轮3451内侧分别与轮子341的轮毂342固定连接。所述旋转体344为交叉滚子轴承,所述交叉滚子轴承的外圈固定在左叉臂200或右叉臂300上。所述电机348通过减速器347 驱动小齿轮3452,并安装在电机固定架346上。所述电机固定架346安装在左叉臂200或右叉臂300上。所述锥齿轮组为弧齿螺旋锥齿轮。所述小齿轮3452的中心轴与环状齿轮3451 的中心轴的夹角为90
°
。
47.在上述万向轮使用时,所述旋转体4的外圈固定安装在设备的底座上。电机8未启动时,旋转体4的内圈与外圈相对静止,万向轮不能随意转动。当电机8启动,且电机8带动小齿轮3452转动,小齿轮3452带动环状齿轮3451转动角度α时,环状齿轮3451带动旋转体4 的内圈和轮毂2转动角度α,而旋转体4的外圈由于固定在设备底座上,不会发生转动。其中,角度α的范围是0
°
≤α≤360
°
。并且,调整电机8的速率和运行时间可以随意控制α的大小,实现任意方向转动轮子的滚动方向的目的。
48.本实用新型的使用方法是:当车辆搬运机器人接收到控制中心的调度指令,即按照导航路径到达侯移停车区,每个分体机器人停在一排车轮的一侧;首先调整两叉臂之间的距离,然后慢速向车辆移动,直至被搬运车辆完全进入机器人搬运区,此后两叉臂相对运动,直至叉臂上的轮毂限位座与轮胎接触,两叉臂继续工作逐渐抬起轮胎,两叉臂停止移动,完成该夹持动作后即可把车辆拖移。
49.本实用新型未涉及部分均与现有技术相同或可采用现有技术加以实现。
50.对所公开的实施例的上述说明,使本领域专业技术人员能够实现或使用本实用新型。对这些实施例的多种修改对本领域的专业技术人员来说将是显而易见的,本文中所定义的一般原理可以在不脱离本实用新型的精神或范围的情况下,在其它实施例中实现。因此,本实用新型将不会被限制于本文所示的这些实施例,而是要符合与本文所公开的原理和新颖特点相一致的最宽的范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1