全自动混凝土输送泵车浇筑系统的制作方法
1.本实用新型涉及建筑施工技术领域,特别是涉及一种全自动混凝土输送泵车浇筑系统。
背景技术:
2.混凝土浇筑是指将混凝土浇筑入模直至塑化成型的过程,用以形成建筑的柱、梁板以及桩基或楼梯等。在传统的混凝土浇筑施工作业中,混凝土输送泵车时至少需配置1名扶管操作人员、1名振动棒操作人员、1名指挥操作人员以及1名收面施工人员;在现场施工时,由指挥操作人员控制泵车输送泵,扶住泵管进行混凝土浇筑,浇筑过程中,采用振动棒进行混凝土振捣以及面层混凝土的收面施工等作业。此种混凝土浇筑方式至少需要4名施工人员同时在混凝土浇筑板面上协同作业,使得浇筑的人力成本较高,且在混凝土浇筑过程中,存在支撑体系崩塌的隐患,进而引起支模架坍塌事故的发生,造成人员坠落伤亡,当浇筑面积较大时,施工板面上人员增多,进一步提高了事故发生的机率,不利于安全作业。
技术实现要素:
3.基于此,有必要针对人力成本高以及存在较大安全隐患的技术问题,提供一种全自动混凝土输送泵车浇筑系统。
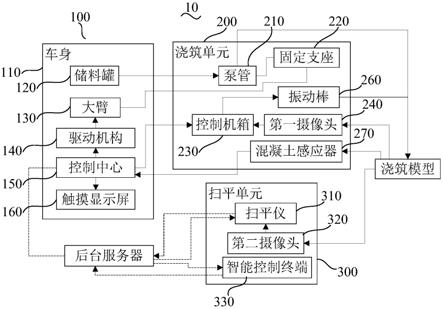
4.一种全自动混凝土输送泵车浇筑系统,包括泵车本体,所述泵车本体包括车身、设于所述车身上用于储存混凝土浆料的储料罐、末端设有浇筑部的大臂、用于驱动大臂运动以调整浇筑作业点的驱动机构以及控制所述驱动机构动作的控制中心;该系统还包括浇筑单元与扫平单元;
5.所述浇筑单元包括与所述储料罐连通的泵管,安装于所述浇筑部并用于固定所述泵管的固定支座以及安装于所述固定支座并与所述控制中心进行数据交互的控制机箱,所述控制机箱的底部安装有用于采集浇筑工况图像的第一摄像头,所述控制机箱内设有与所述控制中心电连接的电机以及穿设所述控制机箱的外壳并与所述电机驱动连接、用于振捣混凝土的振动棒,所述泵管的环侧面设有用于检测混凝土浇筑高度的混凝土感应器;
6.所述控制机箱在接收所述第一摄像头发送的图像信息时,将所述图像信息反馈至所述控制中心,所述混凝土感应器在检测到混凝土浇筑合格后将信息发送至所述控制中心,由所述控制中心控制所述驱动机构动作以改变混凝土浇筑作业点的位置;
7.所述扫平单元包括具有第二摄像头的扫平仪以及智能控制终端,所述扫平仪与所述智能控制终端分别与后台服务器通讯连接,所述扫平仪将所述第二摄像头采集的图像信息经后台服务器发送至所述智能控制终端或接收所述智能控制终端发送的指令对浇筑完成的混凝土面进行收面处理。
8.在其中一个实施例中,所述控制中心预设有用于控制所述驱动机构动作以限定所述浇筑部的浇筑作业路径的程序。
9.在其中一个实施例中,所述泵车本体还包括用于显示所述第一摄像头发送的图像
信息以及接收外部控制指令的触摸显示屏,所述触摸显示屏与所述控制中心电连接。
10.在其中一个实施例中,所述控制机箱以及所述扫平仪内分别设置有抗震机构。
11.在其中一个实施例中,所述控制机箱与所述控制中心电连接或通讯连接。
12.在其中一个实施例中,所述智能控制终端为手机、平板或计算机。
13.在其中一个实施例中,所述混凝土感应器为压力感应器。
14.实施本实用新型的全自动混凝土输送泵车浇筑系统,通过设置浇筑单元和扫平单元,在浇筑作业过程中,作业人员可根据控制中心处由第一摄像头发送的浇筑面的图像信息了解浇筑工况,且混凝土感应器在检测到混凝土浇筑合格后,将信息发送至控制中心,由控制中心自动控制驱动机构以调整浇筑作业点,浇筑完成后的浇筑面由另一名作业人员控制扫平仪进行收面处理,该过程中,仅需两名作业人员即可完成对混凝土的浇筑作业,大大降低了作业的人力成本;且在施工作业中,无需作业人员站立在施工作业面上,规避了作业人员在施工中的操作风险,提升了作业的安全性;浇筑过程的振捣以及浇筑作业点位置调节均由机械自动完成,取代了人工浇筑,提升了浇筑作业效率。
附图说明
15.图1为本实用新型的一个实施例中全自动混凝土输送泵车浇筑系统的模块结构示意图;
16.图2为本实用新型的一个实施例中泵车本体的结构示意图;
17.图3为本实用新型的一个实施例中浇筑单元的结构示意图;
18.图4为本实用新型的一个实施例中扫平单元的结构示意图。
具体实施方式
19.为使本实用新型的上述目的、特征和优点能够更加明显易懂,下面结合附图对本实用新型的具体实施方式做详细的说明。在下面的描述中阐述了很多具体细节以便于充分理解本实用新型。但是本实用新型能够以很多不同于在此描述的其它方式来实施,本领域技术人员可以在不违背本实用新型内涵的情况下做类似改进,因此本实用新型不受下面公开的具体实施例的限制。
20.请参阅图1,本实用新型提供了一种人力成本低、作业安全性好且作业效率高的全自动混凝土输送泵车浇筑系统10,包括泵车本体100、浇筑单元200以及扫平单元300。其中,泵车本体100用于运送混凝土,并为混凝土浇筑作业提供原料,泵车本体100还用于装设浇筑单元200,以便于整体控制并调节浇筑单元200上各部件的工况,实现对浇筑单元200的集中统一管理。浇筑单元200用于向指定的浇筑作业点释放混凝土浆料,并对混凝土浆料进行振捣、浇筑状态观察以及浇筑高度检测等浇筑工序;扫平单元300用于提供平面或直线基准,以便于作业人员判断浇筑后的混凝土浇筑面是否平整,并评估是否进行后施工,以达到提升混凝土浇筑面质量的目的。
21.请结合图1与图2,泵车本体100包括车身110、设置在车身110上用于储存混凝土浆料的储料罐120、末端设有浇筑部131的大臂130、用于驱动大臂130运动以调整浇筑作业点的驱动机构140以及控制驱动机构140动作的控制中心150,优选的,控制中心150为与后台服务器通讯连接的计算机终端,如此,控制中心150可通过后台服务器更新其内部程序,以
保证控制中心150对驱动机构140控制的可靠性。需要说明的,泵车本体100还包括动力系统,该动力系统用以控制车身110行进,以便于将待浇筑的混凝土由某一地点转移至另一地点进行施工作业。也可以理解为,泵车本体100的车身110部分及动力系统部分与市售车辆的结构及连接关系相同,在加装储料罐120、大臂130、驱动机构140以及控制中心150等部件后,泵车本体100构成具有混凝土转运及释放功能的工程车,并对浇筑单元200进行控制调节。
22.一实施例中,控制中心150预设有用于控制驱动机构140动作以限定浇筑部131的浇筑作业路径的程序。具体的,在浇筑作业前,作业人员将待浇筑的建筑构件的形状及尺寸等数据输入控制中心150内,由控制中心150内预设的程序对上述数据进行模拟计算,以形成用于控制驱动机构140工况的电信号参数,从而实现对待浇筑模型的准确浇筑。
23.请参阅图3,浇筑单元200包括与储料罐120连通的泵管210,安装于浇筑部131并用于固定泵管210的固定支座220以及安装于固定支座220并与控制中心150进行数据交互的控制机箱230,控制机箱230的底部安装有用于采集浇筑工况图像的第一摄像头240,控制机箱230内设有与控制中心150电连接的电机250以及穿设控制机箱230的外壳并与电机250驱动连接、用于振捣混凝土的振动棒260,泵管210的环侧面设有用于检测混凝土浇筑高度的混凝土感应器270。
24.其中,泵管210用于接入由储料罐120运送的混凝土浆液,随后在大臂130的带动下将混凝土浆液运送至指定施工地点并释放,固定支座220安装在大臂130的浇筑部131并对泵管210进行固定,防止泵管210在流动混凝土浆液的冲击下发生晃动进而从大臂130上脱落下来,或在晃动的过程中砸伤人员或砸毁设备及物体,以提升泵管210与大臂130连接的稳定性并消除浇筑作业中潜在的安全隐患。
25.控制机箱230用于接收控制中心150发送的指令并控制电机250工作,从而进一步驱动振动棒260动作,如此,振动棒260对释放在待浇筑模型内的混凝土浆料进行振捣,使得混凝土浆液中的固态沙石均匀混合在水泥浆液中,进而保证在模型内浇筑成型的柱、梁板或桩基等建筑构件各部位的强度趋于一致,以提升混凝土浇筑物的质量。一实施例中,控制机箱230与控制中心150电连接或通讯连接。当控制机箱230与控制中心150电连接时,大臂130内设有用于铺设线缆的通道,避免控制机箱230与控制中心150之间的连接线缆因裸露造成的老化加速或漏电事故的发生,以延长线缆的使用寿命并提升浇筑施工作业的安全性。
26.第一摄像头240用于采集浇筑点的工况图像,并将该工况图像经由控制机箱230发送至控制中心150,以便于作业人员掌握浇筑点的工况。需要说明的是,在实际生产中,可以适当延长第一摄像头240与振动棒260末端的距离,以减少振捣作业中混凝土浆料在第一摄像头240上的溅洒量,当然,还可以在第一摄像头240外部套设表面光滑的透明球形罩,避免混凝土浆料在第一摄像头240上积聚,以利于第一摄像头240获取清晰的浇筑作业图像。
27.一实施例中,泵车本体100还包括用于显示第一摄像头240发送的图像信息以及接收外部控制指令的触摸显示屏160,该触摸显示屏160与控制中心150电连接,如此,作业人员不仅可以经由触摸显示屏160获取在浇筑部131处发生的浇筑作业实况,即实时获取浇筑作业点的工况,还可以经由触摸显示屏160向控制中心150发送指令,以降低作业人员的操作难度。当然,为了避免因触摸显示屏160控制失灵造成的泵车本体100控制困难的问题,泵
车本体100内还设置有与控制中心150电连接的多个操作开关,以提供备选控制方案并适应不同作业人员的操作习惯。
28.混凝土感应器270用于检测混凝土浇筑进程,以便在混凝土浇筑至预定高度时向控制中心150发送信号,利于控制中心150经由驱动机构140调节大臂130上浇筑部131的位置,从而进行下一作业点的浇筑作业。一实施例中,混凝土感应器270为压力感应器,混凝土感应器270设置在泵管210的环侧面并临近泵管210的末端,这样,当混凝土层的浇筑高度较小时,混凝土层未与混凝土感应器270接触,在此情况下,混凝土感应器270持续向控制中心150输出恒定大小的电平值;当浇筑的混凝土层达到混凝土感应器270所在高度且混凝土浆液与混凝土感应器270接触时,混凝土感应器270输出的电平值发生突变,控制中心150即判断混凝土浇筑高度达到预定值,浇筑作业到位,随后控制驱动机构140调节浇筑部131的位置并对下一作业点进行混凝土浇筑。在实际作业中,可以通过调节混凝土感应器270在泵管210上的位置来控制混凝土的浇筑高度,于此不再赘述。
29.在混凝土浇筑作业过程中,控制机箱230在接收第一摄像头240发送的图像信息时,将图像信息反馈至控制中心150,以便于作业人员掌握浇筑作业点的工况,混凝土感应器270在检测到混凝土浇筑合格,即混凝土浇筑高度达到预定值后将信息发送至控制中心150,由控制中心150控制驱动机构140动作以改变混凝土浇筑作业点的位置,从而对下一作业点进行浇筑作业,以实现混凝土的自动化浇筑。
30.请结合图1与图4,扫平单元300包括具有第二摄像头320的扫平仪310以及智能控制终端330,扫平仪310与智能控制终端330分别与后台服务器通讯连接,扫平仪310将第二摄像头320采集的图像信息经后台服务器发送至智能控制终端330或接收智能控制终端330发送的指令对浇筑完成的混凝土面进行收面处理。进一步的,扫平仪310还可通过后台服务器进行数据更新。一实施例中,智能控制终端330为手机、平板或计算机。如此,作业人员无需在作业现场监工,可通过第二摄像头320采集的图像信息获取施工现场的浇筑面情况,并远程控制扫平仪310工作,以提升工程作业的灵活性。
31.一实施例中,控制机箱230以及扫平仪310内分别设置有抗震机构,以减少控制机箱230与扫平仪310在振动棒260工作过程中产生的共振,避免控制机箱230与扫平仪310内部的零部件松散进而造成的设备失效问题,以延长设备的使用寿命并保证混凝土浇筑作业的有效进行。
32.实施本实用新型的全自动混凝土输送泵车浇筑系统10,通过设置浇筑单元200和扫平单元300,在浇筑作业过程中,作业人员可根据控制中心150处由第一摄像头240发送的浇筑面的图像信息了解浇筑工况,且混凝土感应器270在检测到混凝土浇筑合格后,将信息发送至控制中心150,由控制中心150自动控制驱动机构140以调整浇筑作业点,浇筑完成后的浇筑面由另一名作业人员控制扫平仪310进行收面处理,该过程中,仅需两名作业人员即可完成对混凝土的浇筑作业,大大降低了作业的人力成本;且在施工作业中,无需作业人员站立在施工作业面上,规避了作业人员在施工中的操作风险,提升了作业的安全性;浇筑过程的振捣以及浇筑作业点位置调节均由机械自动完成,取代了人工浇筑,提升了浇筑作业效率。
33.以上所述实施例的各技术特征可以进行任意的组合,为使描述简洁,未对上述实施例中的各个技术特征所有可能的组合都进行描述,然而,只要这些技术特征的组合不存
在矛盾,都应当认为是本说明书记载的范围。
34.以上所述实施例仅表达了本实用新型的几种实施方式,其描述较为具体和详细,但并不能因此而理解为对实用新型专利范围的限制。应当指出的是,对于本领域的普通技术人员来说,在不脱离本实用新型构思的前提下,还可以做出若干变形和改进,这些都属于本实用新型的保护范围。因此,本实用新型专利的保护范围应以所附权利要求为准。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1