一种基于双层停车AGV搬运器的智能车库的制作方法
一种基于双层停车agv搬运器的智能车库
技术领域
1.本发明涉及立体停车装置技术领域,更具体地,涉及基于双层停车agv搬运器的智能车库。
背景技术:
2.梳齿式是立体车库产品的一种搬运形式,结构分为提升通道和泊位,提升通道内设升降梳齿架及提升系统,升降梳齿分为前轮梳齿和后轮梳齿两部分。泊位为横移梳齿架分布于提升通道两侧。出入口是设置于地面层升降通道内,或设有固定回转盘。存车时,通过升降梳齿架与横移梳齿架交换,到达指定层,通过横移梳齿架横移实现从通道到泊位的搬运,通过横移回转盘实现车辆调头,前进入库出库。
3.随着agv自导引车的发展,基于agv自导引车的停车场实现了存取车的全自动化,极大地方便了车主存取车操作。但是,该agv自导引车仅适用于单层停车场的自动存取,并没有提高停车场的空间利用率,增加停车容量。基于上述内容可知,目前利用agv自导引车停取车车辆的停车系统,其仅能实现单层停车,以致对车库的空间利用率不高。
4.双层梳齿架可以解决上述问题,但现有的agv引导车只适用于单层的停车库使用,为了能适用于双层梳齿架的使用,需要提供一种基于双层停车agv搬运器的智能车库。
技术实现要素:
5.本发明要解决的技术问题是针对上述不足,提供了一种基于双层停车agv搬运器的智能车库,主要由具有双层停车agv搬运器、智能检测出入口、车辆升降系统、双层汽车存放架、智能车库管理系统等系统组成。该智能车库适用于地下车库、城市空余空间(立交桥下、公园等)、商场停车场和老旧小区改造的地面、地下停车场等,利用双层停车agv搬运器实现由车出入口到双层存放架之间的自动存取。
6.本发明的目的通过以下技术方案予以实现:提供一种基于双层停车agv搬运器的智能车库,包括智能检测出入口、车辆升降系统和双层汽车存放架,所述检测出入口包括入口端和出口端,所述入口端处设置有检测传感器;所述出口端配置有车辆升降系统;待存放汽车通过智能检测入口进入,通过车辆升降系统将汽车或承载汽车的双层停车agv搬运器送达各个不同楼层,将汽车通过双层停车agv搬运器承载搬运,将汽车存放至每个楼层内的多组双层汽车存放架上;所述汽车存放架包括一层梳齿结构和二层梳齿结构,所述一层梳齿结构和二层梳齿结构通过存放架架体将其上下设置;所述二层梳齿结构为翻转式梳齿结构,所述翻转式梳齿结构包括翻转梳齿架和安装在翻转梳齿架下设置有锁止结构,所述锁止结构沿着存放架架体方向上下伸缩;所述翻转梳齿架的框架外侧安装有多组翻转梳齿;所述双层停车双层停车agv搬运器包括车架和升降平台,所述车架与升降平台通过使升降平台与车架高度可调节的剪叉结构连杆活动连接,所述升降平台包括升降梳齿架和升降梳齿架两侧各设置有固定梳齿,所述升降梳齿架上安装有车轮对中装置,所述车轮
对中装置包括设置在两侧固定梳齿上的对中杆,两侧成对的对中杆通过设置在升降梳齿架内部的调整器相连;所述连杆为剪叉结构连杆是通过推杆提供动力进行高度变化。
7.进一步地,所述传感器为车辆超高、超宽车辆位置和活体检测传感器。
8.进一步地,所述一层梳齿结构为铺设在两个相对设置的存放架架体之间的成组梳齿一,所述梳齿一安装在支撑架体上并伸出于支撑架体的两侧。
9.进一步地,所述支撑架体为分段结构,分置于两个存放架架体的两侧,所述支撑架体中间部分为未设置梳齿一的空置段;所述翻转式梳齿结构中间部分设置有空置避让结构。
10.进一步地,所述锁止结构为联动自锁箱,所述联动自锁箱包括与翻转式梳齿架相接触的丝杆升降机和放置丝杆升降机的盒体。
11.进一步地,所述连杆为两组交叉呈x状的支撑杆,所述支撑杆的一端与车架或升降平台通过轴连接固定,另一端的端部设置滑块,所述滑块在车架或者升降梳齿架内部的滑道进行滑动。
12.进一步地,所述固定梳齿包括前梳齿和后梳齿,前梳齿与后梳齿的梳齿数量不同;两组所述支撑杆的固定端同时设置在前梳齿或者后梳齿的一侧,同时,所述滑道设置在后梳齿或者前梳齿的一侧。
13.进一步地,连接两侧相对设置的所述剪叉结构连杆,设置有与车架底面平行的安装轴,所述安装轴与推杆的伸缩杆部相连;所述车架内部设置有安装推杆固定部的固定轴。
14.进一步地,所述调整器包括通过伺服电机带动的齿轮,所述齿轮的两侧设置有齿条结构,所述齿条结构的伸出端与对中杆垂直固定连接。
15.进一步地,还包括智能车库管理系统,所述智能车库管理系统包括存取车控制程序,车位智能配置程序,双层停车agv搬运器路径动态优化算法的视觉、激光导航系统和调度系统,双层停车agv搬运器应急避障程序和系统,双层停车agv搬运器电池管理系统,智能车库手机app和其他辅助系统。
16.该基于双层停车agv搬运器的智能车库也可以配置有楼层升降系统,在地面实现人车分离,该系统是针对地下或地上多层车库配置使用,通过该系统,双层停车agv搬运器可以到达各个楼层。楼层升降系统主要由:升降轿厢部件、提升动力部件、导轨部件、配重部件、电气控制系统和辅助部件组成,分为曳引机式提升和链条提升两种方式。
17.该基于双层停车agv搬运器的智能车库根据车库设置的存车位一般配置有多台双层停车agv搬运器,由智能车库系统的调度程序统一统筹管理,并实时动态规划每台双层停车agv搬运器的运行路径。
18.本发明与现有技术相比具有以下有益效果:本基于双层停车agv搬运器的智能车库一般配置多个智能检测出入口,该出入口为人车分离区域,也为双层停车agv搬运器接泊车辆区域。该区域配置有车辆超高、超宽车辆位置和活体检测传感器,当车辆外形尺寸或者所停位置超过限定范围时,检测系统会实时报警,并中止后续的存车流程。出入口配置有前后两套自动门,防止人员误入存取车区域。
19.本基于双层停车agv搬运器的智能车库将车架和升降平台通过高度可调节的连杆活动连接配合推杆,优选为油缸驱动,使整个升降平台与车架的距离根据实际需求调节高
度,使用灵活方便。
20.本基于双层停车agv搬运器的智能车库提供了一种一层梳齿结构和二层梳齿结构相叠置的方式,为了更加方便停放车辆,使车辆放置在二层梳齿时不会受到梳齿结构的干扰,产生不安全因素。本发明将二层梳齿结构设置为翻转式梳齿结构,再通过锁止结构将翻转梳齿架进行定位和支撑,保证车辆有效停放的同时,存取车方式稳定安全可靠,安全性能高。
21.本智能车库中的一层梳齿结构为相对设置,分段铺设在架体两侧,并且中间部分为未设置梳齿一的空置段。此种设置是为了给搬运待停放车辆的搬运器留有操作位置,搬运器将待停放车辆搬运起来,搬运器停放在空置段中,空置段相当于搬运器的停车位,此种设置可以有效利用停车库空间。
22.本智能车库的双层汽车存放架设置二层梳齿架能有效地利用车位上层空间,比现有的一层停车agv搬运器的车库增加了一倍的车位,且安全可靠,性价比非常高,配合具有双层停车功能的agv搬运器使用,组成一种全新的智能车库。
23.同时,本基于双层停车agv搬运器的智能车库的连杆采用交叉形式设置,结构简单,配合滑道结构使用,安全便捷,生产成本较低,易维护,易安装,建设周期短。
附图说明
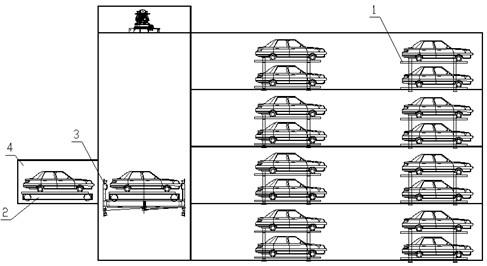
24.图1为本发明所述基于双层停车agv搬运器的智能车库的整体结构示意图。
25.图2为本发明所述双层停车agv搬运器的整体结构示意图。
26.图3为本发明所述双层停车agv搬运器的整体结构侧视图。
27.图4为本发明所述双层停车agv搬运器的调整器结构示意图。
28.图5为本发明所述双层汽车存放架的结构示意图一。
29.图6为本发明所述双层汽车存放架的结构示意图二。
30.图7为本发明所述基于双层停车agv搬运器的智能车库的安装示意图。
31.图中,1
‑
双层汽车存放架,2
‑
双层停车agv搬运器,3
‑
车辆升降系统,4
‑
智能检测出入口,21
‑
车架,22
‑
伺服舵轮,23
‑
行走舵轮,24
‑
升降梳齿架,25
‑
固定梳齿,26
‑
车轮对中装置,27
‑
伺服电机,28
‑
连杆,29
‑
液压系统,210
‑
蓄电池,211
‑
控制柜,212
‑
推杆,213
‑
伸缩杆部,214
‑
推杆固定部,215
‑
安装轴,216
‑
齿轮,217
‑
齿条结构,218
‑
滚轮,219
‑
滑道,220
‑
滑块,31
‑
支撑架体,311
‑
梳齿一,32
‑
存放架架体,33
‑
翻转梳齿架,331
‑
梳齿二,34
‑
空置段,35
‑
自锁电机,36
‑
联动杆,37
‑
锁止结构,371
‑
丝杆升降机,372
‑
盒体,38
‑
电机,39
‑
空置避让结构。
具体实施方式
32.下面具体实施例进一步详细说明本发明。除非特别说明,本发明实施例使用的各种材料均可以通过常规市购得到,或根据本领域的常规方法制备得到,所用设备为实验常用设备。除非另有定义或说明,本文中所使用的所有专业与科学用语与本领域技术熟练人员所熟悉的意义相同。
33.实施例1如图1~图7所示,本实施例的基于双层停车agv搬运器的智能车库,其包括智能检
测出入口4、车辆升降系统3和双层汽车存放架1,检测出入口4包括入口端和出口端,入口端处设置有检测传感器;出口端配置有车辆升降系统3;待存放汽车通过智能检测入口4进入,将汽车通过双层停车agv搬运器2承载搬运,通过车辆升降系统3将双层停车agv搬运器2送达各个不同楼层,将汽车存放至每个楼层内的多组双层汽车存放架1上;汽车存放架1包括一层梳齿结构和二层梳齿结构,一层梳齿结构和二层梳齿结构通过存放架架体32将其上下设置;二层梳齿结构为翻转式梳齿结构,翻转式梳齿结构包括翻转梳齿架33和安装在翻转梳齿架33下设置有锁止结构37,锁止结构37沿着存放架架体32方向上下伸缩;翻转梳齿架33的框架外侧安装有多组翻转梳齿;双层停车agv搬运器2包括车架21和升降平台,车架21与升降平台通过使升降平台与车架21高度可调节的连杆28活动连接,升降平台包括升降梳齿架24和升降梳齿架24两侧各设置有固定梳齿25,固定梳齿25包括前梳齿和后梳齿,本实施例中的前梳齿与后梳齿的梳齿数量不同。前梳齿的每个梳齿齿条是平行设置,每个梳齿齿条上安装有滚轮218,滚轮218是方便车轮在梳齿25上移动,为车轮在梳齿25上滑移提供导向。
34.升降梳齿架24上安装有车轮对中装置26,车轮对中装置26包括设置在两侧固定梳齿25上的对中杆,两侧成对的对中杆通过设置在升降梳齿架24内部的调整器相连;连杆28为剪叉结构连杆,剪叉结构连杆是通过推杆212提供动力进行高度变化。本实施例采用齿条结构217,两侧成对的对中杆通过设置在升降梳齿架24内部的调整器相连;调整器包括通过伺服电机27带动的齿轮216,齿轮216的两侧设置有齿条结构217,齿条结构217的伸出端与对中杆垂直固定连接。连杆28通过推杆212(本实施例优选为液压气缸)提供动力进行高度变化。
35.本实施例的连杆28为两组交叉呈x状的支撑杆,支撑杆的一端与车架21或升降平台通过轴连接固定,另一端的端部设置滑块220,滑块220在车架21或者升降梳齿架24内部的滑道219进行滑动。为了使连杆28滑动满足一致性,需将两组支撑杆的固定端同时设置在前梳齿或者后梳齿的一侧,同时,滑道219设置在后梳齿或者前梳齿的一侧。
36.连接两侧相对的剪叉结构连杆,设置有与车架21底面平行的安装轴215,该安装轴215与推杆212的伸缩杆部213相连。整个推杆212为电动推杆,其伸缩杆部213可以在推杆固定部214内部伸缩。推杆固定部214的固定轴安装于车架21内部。
37.为了方便运输,车架21的两端底部对称设置有行走舵轮23,在两个行走舵轮23之间设置有伺服舵轮22。
38.车架21的两侧安装有供电电池(如图中蓄电池210)和控制柜211,车架21内设置有液压系统29。使整个搬运器更加智能可控。
39.本实施例的一层梳齿结构为铺设在两个相对设置的存放架架体32之间的成组梳齿一311,梳齿一311安装在支撑架体31上并伸出于支撑架体31的两侧。
40.本实施例的支撑架体31为分段结构,分置于两个翻转梳齿架33的两侧,支撑架体31中间部分为未设置梳齿一311的空置段34。
41.本实施例的翻转式梳齿结构的中间部分设置有空置避让结构39。
42.其翻转式梳齿架成对安装在架体32的顶部,且将架体32夹持在对称设置的翻转式梳齿结构间,包括梳齿二331和翻转梳齿架33。
43.本实施中选用的锁止结构37为联动自锁箱,联动自锁箱包括与翻转式梳齿架相接
触的丝杆升降机371和放置丝杆升降机371的盒体372。盒体372放置在与架体一侧固定安装的支撑架上。锁止结构37通过自锁电机35带动丝杆上下运行。
44.翻转式梳齿结构的翻转梳齿架33的一端设置有电机38,在本实例中两个电机38间设置有联动杆36,使两侧的锁止结构37同时升降,保证两侧的梳齿二331的水平高度相同,方便将待停放车辆有效停放不偏移,稳定性强。
45.本实施例中的存放架架体32是二层梳齿结构的承重基础,存放架架体32为前后立柱结构,在前后立柱上配置有左右两套梳齿架,即相邻的两个车位共用一个立柱。支撑架体(即低层固定梳齿架)固定安装在地面,分为前后两个部分,相邻连个车位共用梳齿架,其高度适合双层停车梳齿式agv搬运器从下面穿过。二层梳齿架可以由下垂状态向上翻转到水平状态,其主要由电机、翻转梳齿架的主体、轴承座和限位开关等组成,其翻转只要能实现梳齿架翻转均可使用。自锁机构33利用丝杆升降机的原理,将丝杆或梯形螺杆实现升级,两侧的联动自锁箱通过联动杆传递动力。
46.为了使整个智能车库使用方便,将智能检测出入口4处设置有车辆超高、超宽车辆位置和活体检测传感器,使出入口为人车分离区域,也为agv搬运器接泊车辆区域。当车辆外形尺寸或者所停位置超过限定范围时,检测系统会实时报警,并中止后续的存车流程。出入口配置有前后两套自动门,防止人员误入存取车区域。
47.该智能车库配置的车辆升降系统3,在地面实现人车分离,该系统是针对地下或地上多层车库配置使用,通过该车辆升降系统3,agv搬运器可以到达各个楼层。楼层升降系统为停车库常用的装备,主要由升降轿厢部件、提升动力部件、导轨部件、配重部件、电气控制系统和辅助部件组成,分为曳引机式提升和链条提升两种方式。
48.本基于双层停车agv搬运器的智能车库智能车库还设置有管理系统其功能包括:存取车控制程序,车位智能配置程序,双层停车agv搬运器视觉导航技术,agv搬运器路径动态优化算法,agv搬运器应急避障程序,agv搬运器电池管理系统,智能车库手机app和其他辅助系统等。只要能实现上述功能的方法均可用于本停车库的使用。此实施例不赘述。双层停车agv搬运器2由车载视觉系统对采集的实时图像进行分析和识别,以整个工作环境为目标,对包括 agv、导引路径、障碍物等进行对象识别,对各个摄像机获取的图像进行基于特征的图像融合,得到全局地图。在生成的全局地图中,每个 agv 单元,导引线,障碍物的绝对坐标都能够实时获取。全局视觉方法相对于将摄像机安装在车体上的局部视觉方法,在多 agv 调度、障碍物检测(固定和移动)、避障、全局监测方面更具优势。升降梳齿架24上安装有车轮对中装置26,车轮对中装置26包括设置在两侧固定梳齿25上的对中杆,两侧成对的对中杆通过设置在升降梳齿架24内部的调整器相连;连杆28为可调式支撑杆,可调支撑杆是通过推杆212提供动力进行高度变化。
49.实施例2本实施例与实施例1相似,其不同之处在于,待存放汽车通过智能检测入口4进入,通过车辆升降系统3将汽车送达各个不同楼层,双层停车agv搬运器2存放在不同楼层间,待汽车送达到指定楼层是,双层停车agv搬运器2将汽车存放至目标楼层内的多组双层汽车存放架1上。
50.本双层停车的agv搬运器智能车库相较于传统的二层升降横移车库、二层简易升降车库和一层的agv搬运器车库的优势有:
1.每单个车位的造价低、安装简单、运行效率高,智能化程度高;2.存取车全程agv搬运器自动进行,驾驶人员存取车体验好,安全性高;3.相较于一层agv搬运器车库增加了一倍的车位,存车数量显著提高。
51.本双层停车的agv搬运器智能车库使用时,二层梳齿结构的存取车过程中都要求一层梳齿结构不停车。二层梳齿结构的存车过程如下:agv搬运器搭载车辆到达指定车位,此时搬运器上固定梳齿略高于一层梳齿结构的梳齿一,二层梳齿结构的翻转梳齿架处于垂直状态,搬运器直行到达车位下方。然后,搬运器的推杆为油缸驱动动作,将搬运器上的梳齿架和车辆举升,当举升高度略高于二层梳齿结构的翻转梳齿架水平高度时,停止动作。此时,二层梳齿结构的翻转梳齿架的梳齿二动作,由垂直状态向上翻转到达水平状态,自锁电机启动,带动自锁箱动作,丝杆上升,直到顶住翻转梳齿架的主梁的底部。然后,搬运器升降系统略微下降,升降梳齿架向下运动,与翻转梳齿架完成梳齿交换,车辆已经停于二层梳齿结构的翻转梳齿架上,车辆重量由共四个自锁箱承载。二层梳齿结构取车过程与上述过程相反,而二层梳齿结构是否有车都不影响一层梳齿结构的存取车。
52.相同或相似的标号对应相同或相似的部件;附图中描述位置关系的用于仅用于示例性说明,不能理解为对本专利的限制。显然,本发明的上述实施例仅仅是为清楚地说明本发明所作的举例,而并非是对本发明的实施方式的限定。对于所属领域的普通技术人员来说,在上述说明的基础上还可以做出其它不同形式的变化或变动。这里无需也无法对所有的实施方式予以穷举。凡在本发明的精神和原则之内所作的任何修改、等同替换和改进等,均应包含在本发明权利要求的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1