一种双塔立体智能停车库的制作方法
1.本技术涉及立体停车库的领域,尤其是涉及一种双塔立体智能停车库。
背景技术:
2.随着城市车辆拥有量不断增长,随之而来的是城市主要商区、公共场所、社会单位和居民区的停车场的需求相应增加,对车位需求增高。但建设停车场需要很多的土地,当今城市土地资源昂贵、稀少,成为建设停车场的瓶颈。停车难矛盾催生了机械式立体停车库的大量出现,升降横移式车库,井架提升式车库、转动式和直升式立体停车库等相继出现纷纷投入使用。这种向空间发展的停车技术措施,对解决城市中心城区的汽车停车矛盾起到了积极作用。
3.相关的公告号为cn207063634u的中国实用新型专利,其公开了一种智能停车库,包括钢结构框架、载车板、承载机构、多个横移机构以及多个纵向牵引机构,钢结构框架包括纵向输送通道和设置在纵向输送通道两侧的多个存车库,每个存车库内均设置有一个横移机构,承载机构在纵向牵引机构的牵引下可沿纵向输送通道移动,载车板置于承载机构上,横移机构用于驱动载车板由纵向输送通道移动至存车库内。
4.针对上述中的相关技术,发明人认为相关的智能停车库在每个存车库内均安装有一个横移机构,用于对车辆进行取送,使得智能停车库的建造以及维护成本较高。
技术实现要素:
5.为了改善相关的智能停车库的建造及维护成本较高的问题,本技术提供一种双塔立体智能停车库。
6.本技术提供的一种双塔立体智能停车库采用如下的技术方案:一种双塔立体智能停车库,包括停车塔架以及用于取送车辆的运送装置,所述停车塔架沿自身高度方向上形成有若干存车架,所述运送装置包括纵向提升机构、取送车机构以及停车板,所述取送车机构包括车板承载座以及设置在车板承载座上的摩擦移动台组,所述纵向提升机构用于带动车板承载座沿停车塔架的高度方向移动,所述摩擦移动台组用于将停车板从车板承载座输送至存车架上或将停车板从存车架输送至车板承载座上。
7.通过采用上述技术方案,在将车辆送入或取出存车架时,通过纵向提升机构将车板承载座移动至存车架的一侧,安装在车板承载座上的取送车机构启动,对停车板进行移动。通过将取送车机构集成安装在车板承载座上,对车辆进行移动,从而只需一个取送车机构即可实现对智能停车库内各车辆的取送,有效降低智能停车库的建造以及后续维护成本,使得智能停车塔的整体结构更加简单合理。
8.优选的,所述摩擦移动台组包括轮组安装座、轮组驱动件以及摩擦输送部件,所述轮组安装座连接于车板承载座上,所述轮组驱动件和摩擦输送部件均设置于轮组安装座上,所述停车板的底部固定有摩擦输送板;所述摩擦输送部件包括安装壳以及转动连接于安装壳内的摩擦轮,所述安装壳连接于轮组安装座上,所述摩擦输送板位于两组摩擦输送
部件的摩擦轮之间,所述摩擦轮与摩擦输送板抵接,所述轮组驱动件用于驱动摩擦轮转动。
9.通过采用上述技术方案,在对停车板进行移动时,停车板底部的摩擦输送板位于相对的两个摩擦轮之间,轮组驱动件通过驱动摩擦轮转动,摩擦轮通过摩擦力带动摩擦输送板移动,继而摩擦输送板带动停车板移动,从而实现对停车板的取送。取送车机构利用摩擦力对停车板进行移动,结构简单巧妙,对于停车板以及停车板上的车辆的移动更加平稳高效,也降低智能停车库的建造以及后续维护成本,使得智能停车塔的整体结构更加简单合理。
10.优选的,所述摩擦输送部件还包括传动齿轮、第一链轮、第二链轮以及传动链条,所述传动齿轮转动连接于安装壳内,所述第一链轮和传动齿轮同轴固定,所述第二链轮和摩擦轮同轴固定,所述第一链轮和第二链轮之间通过传动链条相连接,两组所述摩擦输送部件的传动齿轮之间相啮合,所述轮组驱动件与其中一个传动齿轮连接,用于驱动所述传动齿轮转动。
11.通过采用上述技术方案,轮组驱动件带动其中一个传动齿轮转动,两个传动齿轮之间相啮合,继而两个传动齿轮同步转动,传动齿轮带动第一链轮转动,第一链轮通过传动链条带动第二链轮转动,第二链轮则带动摩擦轮转动,实现对停车板的移动输送;且通过轮组驱动件能够带动两个摩擦轮的同步转动,使得摩擦轮对摩擦输送板的摩擦输送效果更好,停车板的移动过程更加平稳。
12.优选的,所述安装壳与轮组安装座转动连接,所述摩擦移动台组还包括压力调整部件,两个所述安装壳通过压力调整部件相对固定;所述压力调整部件包括调整杆和弹性件,所述调整杆位于两个安装壳之间,且所述调整杆的两端穿出相邻的安装壳并与弹性件连接,所述调整杆的两端通过弹性件与安装壳的外壁抵接。
13.通过采用上述技术方案,相对的两个安装壳之间通过压力调整部件相对固定,调整杆的两端通过弹性件与安装壳的外壁抵接,弹性件对安装壳的施加弹性压力,使得两个摩擦轮之间相互抵接,继而摩擦输送板从两个摩擦轮之间通过时,摩擦轮能够对摩擦输送板施加压力,以使得摩擦轮对摩擦输送板进行摩擦输送时,具备足够的摩擦力以驱动摩擦输送板移动。
14.优选的,所述压力调整部件还包括调整螺母,所述调整杆穿出安装壳的一端与调整螺母螺纹连接,所述弹性件连接于调整螺母和安装壳之间,所述调整螺母用于调整弹性件对安装壳施加的压力。
15.通过采用上述技术方案,通过转动调整螺母,继而调整弹性件的压缩变形程度,继而改变弹性件对安装壳施压的压力大小,从而调整摩擦轮对摩擦输送板施加的压力,以使得摩擦移动台组对停车板的输送过程更加稳定。
16.优选的,所述摩擦输送部件还包括张紧链轮,所述张紧链轮转动连接在安装壳内,所述张紧链轮与传动链条相啮合,所述张紧链轮与传动链条抵接。
17.通过采用上述技术方案,通过张紧链轮对传动链条进行张紧,以使得传动链条在进行传动的过程中,传动链条不易出现松落、脱齿等情况,保障传动链条在传动过程的运行稳定性。
18.优选的,所述安装壳内滑移连接有张紧座,所述张紧链轮转动连接于张紧座上,所
述安装壳上穿设有张紧杆,所述张紧杆位于张紧链轮远离传动链条的一侧,所述张紧杆与安装壳螺纹连接,所述张紧杆穿入安装壳的一端与张紧座抵接。
19.通过采用上述技术方案,通过转动张紧杆,调整张紧杆对张紧座施加的压力,继而调整张紧链轮对传动链条的张紧效果,从而便于对传动链轮张紧状态进行调整,保障摩擦输送台组良好的运行状态。
20.优选的,所述轮组安装座滑移连接于车板承载座上,所述取送车机构还包括取送组件,所述取送组件用于驱动轮组安装座向靠近存车架或远离存车架的方向移动。
21.通过采用上述技术方案,当需要将停车板从存车架取出时,通过取送组件驱动摩擦移动台组向靠近存车架的方向移动,以使得停车板底部的摩擦输送板能够顺利穿入两个摩擦轮之间,从而轮组驱动件在带动摩擦轮转动时,能够顺利的将停车板从存车架移动到车板承载座上。
22.优选的,所述取送组件包括取送电机、螺旋升降减速机以及传动螺杆,所述取送电机和螺旋升降减速机设置于车板承载座上,所述取送电机与螺旋升降减速机连接,所述螺旋升降减速机与传动螺杆连接,所述取送电机通过螺旋升降减速机带动传动螺杆在转动的同时并沿自身轴向移动,所述传动螺杆的一端与轮组安装座转动连接。
23.通过采用上述技术方案,取送电机通过螺旋升降减速机带动传动螺杆在转动的同时并沿自身轴向移动,继而传动螺杆带动轮组安装座朝向靠近或远离存车架的方向移动;取送组件通过螺旋升降减速机和传动螺杆对摩擦移动台组进行移动,传动精度高且传动平稳,使得摩擦移动台组在车板承载座上的移动更加平稳。
24.优选的,所述轮组安装座的一侧设置有位置检测组件,所述位置检测组件与取送电机电性连接,所述位置检测组件包括若干移动接近开关以及与移动接近开关相适配的移动检测板,所述移动接近开关沿轮组安装座的移动方向排布,所述移动接近开关固定在车板承载座上,所述检测板固定在轮组安装座上。
25.通过采用上述技术方案,取送组件在驱动轮组安装座移动的过程中,位置检测组件通过移动检测板和若干移动接近开关对轮组安装座的移动位置进行检测,并将检测信号传递至取送组件,以调控摩擦移动台组在车板承载座上的位置。
26.综上所述,本技术包括以下至少一种有益技术效果:1.通过设置摩擦移动台组,降低智能停车库的建造以及后续维护成本,整体结构更加简单合理,且对于车辆的存取效率高;2.通过设置压力调整组件,便于调整摩擦轮对摩擦输送板施加的压力,以使得摩擦移动台组对停车板的输送过程更加稳定;3.通过设置张紧链轮,使得传动链条在进行传动的过程中,传动链条出现不易松落、脱齿等情况,保障摩擦输送部件在运行过程中的稳定性。
附图说明
27.图1是本技术实施例一种双塔立体智能停车库的整体结构示意图。
28.图2是本技术实施例一种双塔立体智能停车库的局部结构示意图。
29.图3是图2中a部位的局部放大图。
30.图4是本技术实施例用于体现运送装置的局部结构示意图。
31.图5是本技术实施例用于体现旋转机构的整体结构示意图。
32.图6图4中b部位的局部放大图。
33.图7是本技术实施例用于体现运送装置的爆炸图。
34.图8是本技术实施例用于体现旋转检测组件的侧视图。
35.图9是图8中c部位的局部放大图。
36.图10是本技术实施例用于体现旋转限位组件的结构示意图。
37.图11是图10中d部位的局部放大图。
38.图12是本技术实施例中旋转限位组件的整体结构示意图。
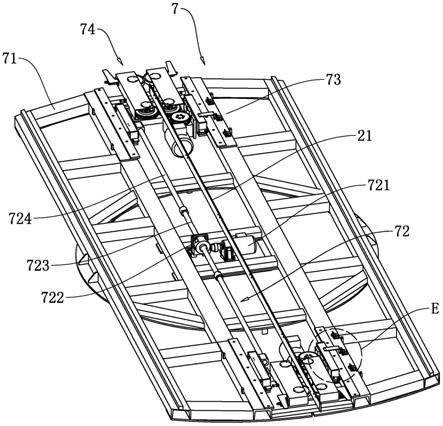
39.图13是本技术实施例中取送车机构的整体结构图。
40.图14图13中e部位的局部放大图。
41.图15是本技术实施例中摩擦输送台组的整体结构示意图。
42.图16是本技术实施例用于体现压力调整部件的局部结构示意图。
43.附图标记说明:1、停车塔架;11、存车架;12、存车位;2、停车板;21、摩擦输送板;3、纵向轨道框架;31、轨道主梁;32、轨道横梁;4、纵向提升机构;41、搬器框架;411、搬器主梁;412、搬器横梁;413、吊重箱;42、卷扬机;43、导向组件;431、第一导轮;432、第二导轮;433、纵向导轨条;5、旋转机构;51、旋转底座;52、旋转驱动组件;521、旋转主轴;522、第一旋转齿轮;523、第二旋转齿轮;524、旋转减速电机;53、旋转检测组件;531、旋转接近开关;532、旋转检测板;54、旋转辅助组件;541、旋转辅助轮;55、旋转限位组件;551、限位安装座;5511、底板;5512、竖板;5513、转动轴;5514、推杆;552、限位插板;553、插板驱动件;554、复位弹簧;5541、第一连接栓;5542、第二连接栓;6、横向移动机构;61、横移轮;62、横移减速电机;63、横移导轨条;64、限位挡座;641、缓冲垫;7、取送车机构;71、车板承载座;711、限位插槽;72、取送组件;721、取送电机;722、螺旋升降减速机;723、传动螺杆;724、连接杆;73、位置检测组件;731、移动接近开关;732、移动检测板;74、摩擦移动台组;741、轮组安装座;7411、轮组支撑座;7412、连接梁;7413、取送滚轮;742、轮组驱动件;7421、减速齿轮;743、摩擦输送部件;7431、安装壳;7432、摩擦轮;7433、传动齿轮;7434、第一链轮;7435、第二链轮;7436、传动链条;7437、张紧座;7438、张紧链轮;7439、张紧杆;75、压力调整部件;751、调整杆;752、弹性件;753、垫片;754、调整螺母。
具体实施方式
44.以下结合附图1-16对本技术作进一步详细说明。
45.本技术实施例公开一种双塔立体智能停车库。参照图1和图2,一种双塔立体智能停车库包括相对设置的两个停车塔架1以及位于停车塔架1之间的用于取送车辆的运送装置,停车塔架1沿自身的高度方向上形成有若干存车架11,存车架11在垂直于停车板2高度方向形成有两个存车位12。运送装置包括纵向提升机构4、横向移动机构6、取送车机构7以及停车板2,纵向提升机构4用于带动停车板2沿停车塔架1的高度方向移动,横向移动机构6用于带动停车板2沿垂直于停车塔架1的高度方向移动,取送车机构7用于将停车板2送入存车位12内或从存车位12内取出。
46.参照图1和图2,纵向提升机构4包括搬器框架41和升降牵引机42。搬器框架41滑动连接于两个停车塔架1之间,横向移动机构6以及取送车机构7均安装在搬器框架41上,升降
牵引机42安装在停车塔架1的顶部,升降牵引机42的吊索与搬器框架41连接,用于带动搬器框架41沿停车塔架1的高度方向移动。
47.参照图1和图2,搬器框架41包括相互平行设置的两个搬器主梁411,两个搬器主梁411之间垂直固定有两个搬器横梁412。搬器主梁411的两端均固定连接有吊重箱413,升降牵引机42的各吊索与吊重箱413固定连接。
48.参照图1和图2,两个搬器主梁411相互远离的一侧均设置有纵向轨道框架3,纵向轨道框架3固定于两个停车塔架1之间,纵向轨道框架3包括轨道主梁31和若干相互平行的轨道横梁32,轨道横梁32水平设置且轨道横梁32的两端与相邻的停车塔架1焊接固定,轨道主梁31垂直固定于轨道横梁32靠近搬器主梁411的一侧的中部。
49.参照图2和图3,纵向轨道框架3和搬器框架41之间设置有导向组件43,以提高搬器框架41沿停车塔架1高度方向移动的稳定性。导向组件43包括第一导轮431、第二导轮432以及纵向导轨条433,纵向导轨条433固定在轨道主梁31靠近搬器主梁411的一面,纵向导轨条433沿停车塔架1的高度方向延伸。第一导轮431和第二导轮432均转动连接于搬器主梁411上。第一导轮431设置有两个,两个第一导轮431相对设置,纵向导轨条433位于两个第一导轮431之间,第一导轮431的转动周面与纵向导轨条433的侧壁抵接;第二导轮432位于两个第一导轮431之间,第二导轮432的转动周面与纵向导轨条433远离轨道主梁31的一面抵接。从而当搬器框架41在升降牵引机42的提升作用下,沿停车塔架1的高度方向移动,此时,第一导轮431和第二导轮432在纵向导轨条433的外壁上滚动,对搬器框架41的移动起到限位和导向作用,保障搬器框架41移动的稳定性。
50.参照图4和图5,搬器框架41上连接有旋转底座51,旋转底座51位于两个搬器横梁412之间,且旋转底座51长度方向的两端位于搬器横梁412的顶部。横向移动机构6和取送车机构7均安装在旋转底座51上,横向移动机构6包括若干横移轮61和横移减速电机62,搬器横梁412的顶壁沿自身的长度方向固定有横移导轨条63,横移轮61转动连接在旋转底座51上,横移轮61的转动周面与横移导轨条63抵接。本实施例中,横移轮61设置有四个,横移减速电机62设置有两个,每个横移导轨条63对应连接有两个横移轮61,且两个横移轮61中的其中一个与横移减速电机62的输出轴同轴固定,横移减速电机62通过驱动横移轮61转动,从而带动旋转底座51以及安装在旋转底座51上的取送车机构7移动。
51.参照图4和图6,搬器横梁412长度方向的两端设置有限位挡座64,且限位挡座64固定在搬器主梁411上,限位挡座64用于对旋转底座51的移动范围进行限制。限位挡座64靠近旋转底座51的一面固定连接有橡胶材质的缓冲垫641,用以对旋转底座51起到缓冲保护的作用。
52.参照图5和图7,取送车机构7包括车板承载座71以及安装在车板承载座71上的摩擦移动台组74。车板承载座71设置在旋转底座51上,车板承载座71与旋转底座51转动连接。摩擦移动台组74用于将停车板2从从车板承载座71输送至存车架11上或将停车板2从存车架11输送至车板承载座71上。旋转底座51上设置有旋转机构5,旋转机构5用于带动车板承载座71转动180
°
,对车辆进行转向,以便于车辆从智能停车库中驶出。
53.参照图5和图7,旋转机构5包括旋转驱动组件52和旋转辅助组件54,旋转驱动组件52包括旋转主轴521、第一旋转齿轮522、第二旋转齿轮523以及旋转减速电机524。旋转主轴521转动连接于旋转底座51上,车板承载座71固定在旋转主轴521上。旋转减速电机524通过
螺栓固定在旋转底座51的底面,旋转减速电机524的输出轴穿过旋转底座51,并与第一旋转齿轮522同轴固定。第二旋转齿轮523套设在旋转主轴521上,且第二旋转齿轮523与旋转主轴521同轴固定,第一旋转齿轮522和第二旋转齿轮523相啮合。旋转减速电机524带动第一旋转齿轮522转动,第一旋转齿轮522带动第二旋转齿轮523转动,继而第二旋转齿轮523通过旋转主轴521带动车板承载座71转动,以实现对停车板2以及停靠在停车板2上车辆的换向。
54.参照图8和图9,旋转底座51靠近车板承载座71的一面安装有旋转检测组件53,旋转检测组件53和旋转驱动组件52电性连接,旋转检测组件53包括两个旋转接近开关531以及与旋转接近开关531相适配的旋转检测板532。本实施例中,旋转接近开关531采用lj30a3-15-z/bx电感式接近开关。两个旋转接近开关531固定在旋转底座51靠近车板承载座71的表面上,且沿旋转底座51的长度方向排布,两个旋转接近开关531对称设置于旋转主轴521的两侧;旋转检测板532固定在车板承载座71的底面。旋转驱动组件52带动车板承载座71转动时,车板承载座71带动旋转检测板532从其中一个旋转接近开关531处转动180
°
移动到另一个旋转接近开关531处,旋转接近开关531与旋转减速电机524电性连接,用于控制旋转减速电机524的启闭,从而保障旋转机构5对车板承载座71转动角度的准确度。
55.参照图7和图9,旋转辅助组件54包括若干旋转辅助轮541,旋转辅助轮541转动连接在旋转底座51上,旋转辅助轮541位于旋转底座51和车板承载座71之间,且旋转辅助轮541对称分布在旋转主轴521的周侧,旋转辅助轮541的转动周面与车板承载座71抵接。从而当旋转机构5驱动旋转底座51转动时,旋转辅助轮541对车板承载座71提供良好的支撑,使得车板承载座71不易出现倾斜翘起的情况。
56.参照图10和图11,旋转底座51的两端均设置有旋转限位组件55,旋转限位组件55包括限位安装座551、限位插板552和插板驱动件553。限位安装座551固定在旋转底座51上,限位插板552和插板驱动件553均安装在限位安装座551上,车板承载座71上开设有供限位插板552插入的限位插槽711,插板驱动件553用于驱动限位插板552进入限位插槽711内,以限制车板承载座71的转动,使得旋转底座51和车板承载座71之间相对固定。
57.参照图11和图12,限位安装座551包括底板5511以及垂直固定在底板5511上的两个竖板5512,底板5511通过螺栓固定在旋转底座51的顶壁上,两个竖板5512相对设置在底板5511远离旋转底座51的一面。两个竖板5512之间转动连接有转动轴5513,限位插板552位于两个竖板5512之间,限位插板552的一端套设在转动轴5513上,限位插板552通过转动轴5513与限位安装座551转动连接。插板驱动件553位于两个竖板5512之间且固定在底板5511上,插板驱动件553用于推动限位插板552转动,以使得限位插板552远离插板驱动件553的一端插入限位插槽711内,插板驱动件553可以是气缸、油缸或电磁铁,只要能够推动限位插板552转动即可,本实施例中,插板驱动件553采用推拉式直流电磁铁。
58.参照图11和图12,两个竖板5512之间滑动连接有推杆5514,推杆5514的轴线与转动轴5513的轴线相平行,竖板5512上开设有供推杆5514穿入的滑移长孔,推杆5514的周面与限位插板552抵接,插板驱动件553位于推杆5514远离限位插板552的一侧,插板驱动件553的输出轴与推杆5514抵接。插板驱动件553通过推动推杆5514,推杆5514带动限位插板552的一端朝向限位插槽711内转动,使得限位插板552的一端插入限位插槽711内,从而使得车板承载座71和旋转底座51相对固定,保障车板承载座71在运动过程中的稳定性。
59.参照图11和图12,限位安装座551上连接有两个复位弹簧554,两个复位弹簧554对称设置在限位插板552的两侧,复位弹簧554的一端连接有第一连接栓5541,复位弹簧554通过第一连接栓5541与限位插板552固定连接;复位弹簧554的另一端连接有第二连接栓5542,复位弹簧554通过第二连接栓5542与竖板5512固定连接。当限位插板552在插板驱动件553的作用下插入限位插槽711内时,复位弹簧554处于拉伸状态;当限位插板552失去插板驱动件553的推力作用,限位插板552在复位弹簧554的弹力作用下,从限位插槽711内脱离,以使得限位插板552不易对车板承载座71的转动造成阻碍。
60.参照图13,取送车机构7的摩擦移动台组74设有两组,两组摩擦移动台组74对称设置在车板承载座71上,且摩擦移动台组74与车板承载座71滑移连接。取送车机构7还包括取送组件72,取送组件72安装在车板承载座71上,且位于两个摩擦移动台组74之间。取送组件72用于驱动摩擦移动台组74朝向靠近或远离存车架11的方向移动。
61.参照图13和图14,取送组件72包括取送电机721、螺旋升降减速机722以及传动螺杆723,取送电机721和螺旋升降减速机722均通过螺栓固定在车板承载座71上,本实施例中,螺旋升降减速机722采用vj50-24-1螺旋升降减速机。取送电机721与螺旋升降减速机722连接,传动螺杆723穿设于螺旋升降减速机722内,螺旋升降减速机722与传动螺杆723螺纹连接,传动螺杆723的两端均穿出螺旋升降减速机722并固定连接有连接杆724。连接杆724与传动螺杆723共轴线,且连接杆724远离传动螺杆723的一端与摩擦移动台组74转动连接。取送电机721通过螺旋升降减速机722带动传动螺杆723在转动的同时并沿自身轴向移动,继而传动螺杆723通过连接杆724带动摩擦移动台组74向靠近或远离存车架11的方向移动,并实现了两组摩擦移动台组74之间的同步移动,结构简单合理,传动精度高,使得该取送车机构7更加适用于双塔立体智能停车库取送车作业。
62.参照图14和图15,摩擦移动台组74包括轮组安装座741、轮组驱动件742以及摩擦输送部件743。轮组安装座741连接于车板承载座71上,轮组驱动件742和摩擦输送部件743均安装在轮组安装座741上。轮组安装座741包括相对设置的两个轮组支撑座7411,两个轮组支撑座7411之间固定连接有连接梁7412。
63.参照图13和图14,两个轮组支撑座7411相互远离的侧壁上转动连接有若干取送滚轮7413,连接梁7412通过取送滚轮7413与车板承载板71的上表面抵接。连接杆724靠近摩擦移动台组74的一端与其中一个轮组支撑座7411转动连接。取送组件72在驱动摩擦移动台组74移动时,轮组安装座741通过取送滚轮7413在车板承载座71上移动,降低轮组安装座741和车板承载座71之间的摩擦力,继而使得摩擦移动台组74的移动更加平稳顺畅。
64.参照图13和图14,轮组安装座741的一侧设置有位置检测组件73,位置检测组件73与取送电机721电性连接,以控制取送电机721的启闭。位置检测组件73包括若干移动接近开关731以及与移动接近开关731相适配的移动检测板732。本实施例中,移动接近开关731采用lj30a3-15-z/bx电感式接近开关,且移动接近开关731设置有三个,三个移动接近开关731均安装在车板承载座71上,且沿轮组安装座741的移动方向排布,移动检测板732固定在靠近移动接近开关731的轮组支撑座7411上。移动检测板732在初始状态时,位于相对位于中间的移动接近开关731处,当取送车机构7在进行停车板2的取车作业时,取送组件72驱动摩擦移动台组74朝向靠近其中一个停车塔架1中的存车架11移动,继而当摩擦移动台组74带动移动检测板732移动到靠近该停车塔架1的移动接近开关731时,移动接近开关731将信
号传递到取送组件72,取送组件72停止对摩擦移动台组74的移动,随后,摩擦移动台组74启动,对停车板2进行移动。
65.参照图13和图15,摩擦输送部件743设置有两组,两组摩擦输送部件743对称安装在轮组安装座741上。摩擦输送部件743包括安装壳7431以及摩擦轮7432。安装壳7431转动连接在连接梁7412的顶壁,相对的两个安装壳7431之间安装有压力调整部件75,两个安装壳7431之间通过压力调整部件75相对固定。摩擦轮7432转动连接于安装壳7431内,轮组驱动件742用于驱动摩擦轮7432转动,停车板2的底部沿自身的长度方向固定有摩擦输送板21。在进行停车板2的输送时,摩擦输送板21位于相对的两个摩擦轮7432之间,摩擦轮7432与摩擦输送板21板抵接,轮组驱动件742通过驱动摩擦轮7432转动,摩擦轮7432在摩擦力的作用下带动摩擦输送板21移动,从而实现对停车板2的移动。
66.参照图15和图16,摩擦输送部件743还包括传动齿轮7433、第一链轮7434、第二链轮7435以及传动链条7436。传动齿轮7433转动连接于安装壳7431内,第一链轮7434与传动齿轮7433同轴固定,且第一链轮7434位于传动齿轮7433远离连接梁7412的一侧;第二链轮7435与摩擦轮7432同轴固定,且第二链轮7435位于摩擦轮7432的底部,传动链条7436围绕在第一链轮7434和第二链轮7435的外侧,第一链轮7434和第二链轮7435之间通过传动链条7436连接啮合,两组摩擦输送部件743的传动齿轮7433之间相啮合。本实施例中,轮组驱动件742采用减速电机,轮组驱动件742通过螺栓固定在轮组安装座741上,轮组驱动件742的输出轴同轴固定有减速齿轮7421,减速齿轮7421与其中一个传动齿轮7433相啮合。轮组驱动件742通过减速齿轮7421带动其中一个传动齿轮7433转动,两个传动齿轮7433之间相啮合,继而两个传动齿轮7433同步转动,传动齿轮7433带动第一链轮7434转动,第一链轮7434通过传动链条7436带动第二链轮7435转动,第二链轮7435则带动摩擦轮7432转动。
67.参照图15和图16,为了保障第一链轮7434和第二链轮7435之间通过传动链条7436啮合传动的稳定性,安装壳7431内滑移连接有张紧座7437,张紧座7437上转动连接有张紧链轮7438,张紧链轮7438位于传动链条7436的外侧,张紧链轮7438与传动链条7436相啮合,且张紧链轮7438与传动链条7436抵接。安装壳7431内穿设有张紧杆7439,张紧杆7439位于张紧链轮7438远离传动链条7436的一侧,张紧杆7439与安装壳7431螺纹连接,张紧杆7439穿入安装壳7431的一端与张紧座7437抵接。通过转动张紧杆7439,调整张紧杆7439对张紧座7437施加的压力,继而调整张紧链轮7438对传动链条7436的压力,以使得传动链条7436处于张紧状态,保障第一链轮7434和第二链轮7435之间传动的稳定性。
68.参照图13和图16,压力调整部件75用于调整摩擦轮7432对摩擦输送板21施加的压力,继而调整摩擦轮7432和摩擦输送板21之间的摩擦力。压力调整部件75包括调整杆751、弹性件752以及调整螺母754。调整杆751穿设于两个安装壳7431之间,且调整杆751位于摩擦轮7432远离连接梁7412的一侧。调整杆751的两端均穿出相邻的安装壳7431并与弹性件752连接,调整杆751的两端通过弹性件752与安装壳7431抵接。本实施例中,弹性件752采用弹簧,弹簧套设在调整杆751上,调整杆751穿出安装壳7431的一端均与调整螺母754螺纹连接,调整螺母754靠近安装壳7431的一侧设置有垫片753,垫片753套设在调整杆751上,弹簧位于安装壳7431和垫片753之间,且弹簧处于压缩状态,弹簧的一端与垫片753抵接,另一端与安装壳7431抵接。通过转动调整螺母754,继而调整弹簧的压缩变形程度,继而改变弹簧对安装壳7431施压的压力大小,从而调整摩擦轮7432对摩擦输送板21之间的压力,使得摩
擦移动台组74对停车板2的输送过程更加稳定。
69.本技术实施例一种双塔立体智能停车库的实施原理为:当车辆需要停靠在停车塔架1内时,车板承载座71上放置有空车状态的停车板2,车辆行驶并停靠在该停车板2上。随后,旋转限位组件55启动,使得限位插板552从停车板2的限位插槽711内脱离。接着,旋转驱动组件52启动,并在旋转检测组件53的检测反馈下,带动停车板2转动180
°
,使得停车板2上的车辆换向,以便于后续车辆的驶出;在此过程中,旋转辅助组件54对车板承载座71的转动起到辅助支撑作用,以提高车板承载座71转动的稳定性。之后,旋转限位组件55再次启动,使得限位插板552插入限位插槽711内,以保障车板承载座71和旋转底座51之间连接的稳定性。
70.随后,纵向提升机构4启动,升降牵引机42通过吊索带动搬器框架41沿纵向轨道框架3移动,继而搬器框架41带动旋转底座51以及车板承载座71向上移动;在此过程中,导向组件43对搬器框架41的移动起到导向作用,使得搬器框架41的移动更加稳定。停车板2在纵向提升机构4的提升作用下移动到相应的存车架11的位置处,之后,横向移动机构6启动,带动车板承载座71沿搬器横梁412的长度方向移动,使得车板承载座71与相应的存车位12对齐。
71.之后,摩擦移动台组74启动,轮组驱动件742带动摩擦轮7432转动,摩擦轮7432带动摩擦输送板21朝向靠近存车架11方向移动,继而带动停车板2移动到相应的存车位12内,从而实现对车辆的停靠存放。
72.当需要将车辆从停车塔架1内取出时,取送车机构7在纵向提升机构4和横向移动机构6的带动下,移动到相应的存车位12处。随后,取送组件72启动,取送组件72带动摩擦移动台组74朝向相应的存车位12内移动,使得停车板2底部的摩擦输送板21插入相对的两个摩擦轮7432之间。随后,摩擦移动台组74启动,轮组驱动件742带动摩擦轮7432转动,摩擦轮7432通过摩擦输送板21将停车板2从存车架11上移动到车板承载座71上。之后,在横向移动机构6以及纵向提升机构4的作用下,将停车板2以及停车板2上的车辆移动到停车塔架1的底部,从而即可将车辆从智能停车库内驶出,有效降低智能停车库的建造以及后续维护成本,使得智能停车塔的整体结构更加简单合理,存取车辆的效率更高。
73.以上均为本技术的较佳实施例,并非依此限制本技术的保护范围,故:凡依本技术的结构、形状、原理所做的等效变化,均应涵盖于本技术的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1