一种预埋滑槽式吊顶安装结构及施工方法与流程
1.本技术涉及洁净厂房吊顶安装技术的领域,尤其是涉及一种预埋滑槽式吊顶安装结构及施工方法。
背景技术:
2.洁净厂房也叫无尘车间,即是无论外在空气条件如何变化,其室内均能具有维持原先所设定要求的洁净度、温湿度及压力等性能。
3.在对天花板吊顶进行安装时,一般为在楼板顶部位置进行钻孔,再打入膨胀螺栓,而后膨胀螺栓与竖直的螺杆连接,再将天花板的龙骨架套设于螺杆上,螺杆再与螺母连接,使其龙骨架抵接于螺母上,实现对龙骨架的固定,再逐块安装天花板。
4.针对上述中的相关技术,发明人认为一方面施工的为洁净厂房,若是在厂房内进行钻孔以及打膨胀螺栓,则会导致灰尘飞扬于车间内,导致后续需要花费较多资源进行除尘工作。
技术实现要素:
5.为了无尘施工,减少后续的除尘工作,本技术提供一种预埋滑槽式吊顶安装结构及施工方法。
6.第一方面,本技术提供的一种预埋滑槽式吊顶安装结构采用如下的技术方案:一种预埋滑槽式吊顶安装结构,包括预埋至楼板内的滑轨,所述滑轨内部开设有滑道,且下端为开口设置,并开口的宽度小于滑道的宽度;滑轨内直线滑动连接有用于连接连接杆的滑座,所述连接杆下端用于连接龙骨架;所述滑道的开口端开设有供滑座穿入滑道内的入口段;所述连接杆下端穿过龙骨架,且连接杆下端设置有抵接龙骨架下端的限位件。
7.通过采用上述技术方案,在楼板浇筑混凝土之前,根据设计要求将滑轨固定于钢筋笼指定位置内并定位,再进行混凝土浇筑,使其滑轨直接预埋至楼板内部,当需要进行吊顶安装时,可将若干滑座从入口段滑入滑道内,再将连接杆与滑座连接,而后在逐步的将龙骨架与连接杆连接,并经限位件对龙骨架进行限位,完成对龙骨架的吊装工作;此过程中,一方面通过滑轨预埋至楼板内,使其后续安装吊顶工作时,无需再进行钻孔等工作,完全以预制装配的方式进行无尘安装工作,无需进行后续除尘处理,可避免灰尘对车间的污染;另一方面实际施工过程中,总是会存在精度问题,当龙骨架有尺寸偏差时,一般需要对龙骨架进行裁切或是连接杆进行弯折,保持连接杆与龙骨架的准确定位,操作较为麻烦;而本技术可以通过对滑座进行滑动,而改变连接杆的位置,从而保证连接杆与龙骨架的对位连接,方便对龙骨架的安装工作,并提高对龙骨架安装位置的精度,提高龙骨架水平精度。
8.可选的,所述连接杆包括钢绞线,所述钢绞线上端采用搭钩结构于滑座下端连接。
9.通过采用上述技术方案,同直径下的钢绞线结构强度高于螺杆,同时钢绞线为软性状态,在地心引力作用下,能够一直保持竖直朝下的状态,故能够保证对龙骨架均匀的吊装力,不会产生对龙骨架倾斜拉力,进一步保障龙骨架吊装时的水平精度,而龙骨架水平设置,天花板安装于龙骨架内才能保证与龙骨架之间的密封性,进一步提高整个无尘车间的密闭性,避免后续吊顶与楼板之间的飞尘掉落至无尘车间内;同时采用搭钩结构方便工作人员实现钢绞线与滑座下端的连接工作,提高施工效率。
10.可选的,所述限位件包括连接于连接杆上的伸缩杆,伸缩杆用于抵接龙骨架竖直位移;所述限位件还包括倾斜检测器,所述倾斜检测器用于检测龙骨架是否倾斜,且所述倾斜检测器与伸缩杆电连接,当倾斜检测器检测龙骨架倾斜时,控制对应的伸缩杆调节龙骨架的竖直位置。
11.通过采用上述技术方案,由于每根连接杆对整体龙骨架的不同位置进行吊装,利用倾斜检测器可检测每个连接杆吊装的龙骨架位置,是否与其他吊装点处于同一水平高度,如高度方向有所偏差,则倾斜检测器可控制伸缩杆的自动升降,调节对应龙骨架的高度位置,使其保持连接杆对龙骨架每个吊装点均处于同一水平线,最大程度上组装后的整体龙骨架处于同一水平状态,保证后续天花板安装后的密封性,同时也无需人工在手动进行龙骨架的高度调节,方便对龙骨架的水平度的调节工作。
12.可选的,所述倾斜检测器包括反射式红外传感器和反射板;所述反射式红外传感器的前端朝向同一直线上相邻所述反射式红外传感器的后端,所述反射板安装在对应所述反射式红外传感器前方的所述反射式红外传感器的后端;所述反射式红外传感器被配置为在与前方的所述反射板之间存在高度差时,视为对应的所述龙骨架倾斜。
13.通过采用上述技术方案,反射式红外传感器的发射端向前方发射红外线,红外线到达前方的反射板后,被折射。在反射式红外传感器与反射板位于同一竖直高度时,折射后的红外线被反射式红外传感器的接收端接收;若位于同一竖直高度,接收端接收的红外线强度减弱甚至接收不到红外线,此时处理器启动驱动组件对龙骨的位置进行调节,有助于提高龙骨的水平度,从而使灰尘不易掉落,影响人们的工作和生活。此外,由于反射板被安装在前方的反射式红外传感器上,因此同一条直线上的龙骨始终保持在同一水平高度。
14.可选的,所述限位件包括阻尼器,阻尼器下端固定于连接杆,上端抵接于龙骨架上,且所述伸缩杆与阻尼器连接,控制阻尼器的升降;所述倾斜检测器设置于阻尼器的伸缩端。
15.通过采用上述技术方案,阻尼器的惯性小,有助于提高龙骨的调节精度,从而有助于提高龙骨的水平度,同时阻尼器可起到减震作用,当受到地质变化而引起整个车间晃动时,阻尼器可减少整体吊顶结构的的振动,最大程度上保持天花板为密封状态。
16.可选的,所述滑轨上端沿自身长度方向固定有若干加强杆。
17.通过采用上述技术方案,增大与楼板混凝土的接触面积,提高滑轨与楼板的结构稳定性,从而保障滑轨能够对龙骨架、天花板起到稳定的吊装工作。
18.第二方面,本技术提供的一种预埋滑槽式吊顶的施工方法采用如下的技术方案:一种预埋滑槽式吊顶的施工方法,包括如下步骤:
步骤1:创建bim模型,根据厂房计算出滑轨安装尺寸、数量;步骤2:将滑轨固定于楼板的钢筋笼内,并滑轨的开口端抵紧于模板内壁,在浇筑楼板混凝土;步骤3:楼板成型后,拆除模板,将所需数量的滑座从入口段插入滑移至滑道中,再对应在滑座上连接连接杆;步骤4:依次将单组龙骨架套接于对应的连接杆上,在利用限位件抵接龙骨架,对龙骨架进行定位。
19.通过采用上述技术方案,一方面通过滑轨预埋至楼板内,使其后续安装吊顶工作时,无需再进行钻孔等工作,完全以预制装配的方式进行无尘安装工作,无需进行除尘处理,可避免灰尘对车间的污染;另一方面实际施工过程中,总是会存在精度问题,当龙骨架有尺寸偏差时,一般需要对龙骨架进行裁切或是连接杆进行弯折,保持连接杆与龙骨架的准确定位,操作较为麻烦;而本技术可以通过对滑座进行滑动,而改变连接杆的位置,从而保证连接杆与龙骨架的对位连接,方便对龙骨架的安装工作,并提高对龙骨架安装位置的精度,提高龙骨架水平精度。
20.综上所述,本技术包括以下至少一种有益技术效果:1.通过滑轨预埋至楼板内,使其后续安装吊顶工作时,无需再进行钻孔等工作,完全以预制装配的方式进行无尘安装工作,无需进行除尘处理,可避免灰尘对车间的污染;2.利用倾斜检测器检测整体龙骨架的倾斜度,并可自动控制对应的伸缩杆调节龙骨架的竖直高度,从而最大程度上保障龙骨架处于水平状态,保证后续天花板安装后的密封性,同时也无需人工在手动进行龙骨架的高度调节,方便对龙骨架的水平度的调节工作。
附图说明
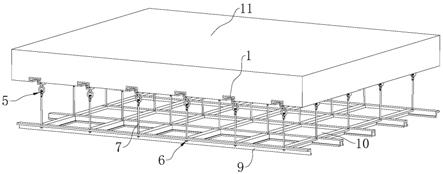
21.图1是本技术实施例1一种预埋滑槽式吊顶安装结构整体结构示意图。
22.图2是图1中钢绞线与滑座、龙骨架的连接结构示意图。
23.图3是本技术实施例2中限位件与钢绞线、龙骨架的连接结构示意图。
24.图4是图3中a处的放大示意图。
25.附图标记说明:1、滑轨;2、滑道;3、开口;4、滑座;5、搭钩结构;6、限位件;61、螺母;62、反射式红外传感器;63、反射板;64、安装块;65、电动推杆;66、电涡流阻尼器;7、钢绞线;8、安装板;9、龙骨架;10、天花板;11、楼板。
具体实施方式
26.以下结合附图1-4对本技术作进一步详细说明。
27.本技术实施例公开一种预埋滑槽式吊顶安装结构。
28.实施例1一种预埋滑槽式吊顶安装结构,参照图1和2,包括若干滑轨1,滑轨1根据所需安装的吊顶结构大小对应设计数量;滑轨1预埋至楼板11内且相互平行设置;滑轨1内部沿自身长度方向开设滑道2,且滑轨1下端为与滑道2连通的开口3设置,开口3的宽度小于滑道2的宽度;滑道2内滑动连接有滑座4,滑座4根据龙骨架9对应设计数量,每个滑座4下端通过搭
钩结构5连接有一组连接杆;连接杆的下端用于与龙骨架9连接,并经限位件6固定龙骨架9。
29.本实施例中,为方便滑座4后置于滑道2内,在滑道2开口3端开设有供滑座4穿入滑道2内的入口段;入口段可根据滑轨1的长度以及滑座4的数量,而言滑轨1长度方向间隔开设多组,入口段处于连接杆限位龙骨架9状态下的相邻滑座4之间,即为入口段永远保持与龙骨架9吊装点错位状态。
30.其中,连接杆与滑座4之间的搭钩结构5可以采用詹氏车钩。
31.连接杆可采用螺杆或者钢绞线7,本实施例中,连接杆采用钢绞线7,可根据龙骨架9的重量而对应采用6mm、8mm或10mm直径的钢绞线7;钢绞线7也可采用单根设置,上端直接与詹式车钩焊接固定;也可以采用双股绳设计。
32.本实施例中,上述钢绞线7的下端焊接固定有一段螺纹柱,上述限位件6采用螺母61,螺母61与螺纹柱螺纹配合,当龙骨架9抬升时,钢绞线7下端穿过龙骨架9与螺母61配合,使其龙骨架9搭在螺母61上,实现对龙骨架9的限位工作。
33.其中,为提高滑轨1与楼板11之间的稳定性,在滑轨1的上端固定有加强杆,加强杆沿滑轨1长度方向设置有多组,使其可与楼板11的混凝土凝固在一起,提高滑轨1与楼板11之间的稳定性。
34.本技术实施例一种预埋滑槽式吊顶安装结构的实施原理为:先将滑轨1固定于楼板11内的钢筋笼上,再浇筑混凝土形成楼板11,滑轨1则与楼板11形成一体,而后根据设计,将多组滑座4从入口段插入滑道2内,再连接钢绞线7与滑座4,再将龙骨架9套接于钢绞线7下端拧上螺母61即可完成龙骨架9的吊装工作,如此往复工作,将所有的龙骨架9进行吊装,在手动旋转螺母61进行龙骨架9的调平工作。
35.实施例2一种预埋滑槽式吊顶安装结构,参照图3和4,与实施例1不同之处在于,上述限位件6包括伸缩杆,本实施例中,伸缩杆采用电动推杆65;上述钢绞线7下端穿设有安装板8,安装板8抵接于螺母61上端;上述电动推杆65下端固定于安装板8上;安装板8上还竖直连接有电涡流阻尼器66,电动推杆65的伸缩端垂直连接有连杆,连杆一端与电涡流阻尼器66相连,电涡流阻尼器66的上端与龙骨架9下端抵接,利用电动推杆65推动电涡流阻尼器66升降,实现对龙骨架9高度的调节工作。
36.上述电涡流阻尼器66的伸缩端还连接有倾斜检测器,倾斜检测器包括反射式红外传感器62、反射板63以及安装块64,反射式红外传感器62以及发射板固定于安装块64的相对的两端,并反射式红外传感器62以及发射板处于与龙骨架9长度方向的同一直线上,即为反射式红外传感器62与下一个钢绞线7上的反射板63对应,如反射式红外传感器62与下一发射板没有处于同一条直线上时,反射式红外传感器62输出信号给予处理器,处理器输出信号给与电动推杆65,控制电涡流阻尼器66的竖直运动,直至反射式红外传感器62与下一发射板处于同一直线,则电动推杆65停止运动,此处龙骨架9为水平状态。
37.本技术实施例一种预埋滑槽式吊顶安装结构的实施原理为:先将龙骨架9套接于钢绞线7上后,再将安装板8套接于钢绞线7上并螺母61拧紧对安装板8进行抵接,此时电涡流阻尼器66抵接于龙骨架9下端对龙骨架9进行支撑,继续安装后续的钢绞线7与龙骨架9连接时,依靠电涡流阻尼器66上的反射式红外传感器62与下一发射板检测是否处于同一直线,如未在同一直线,则处理器控制电动推杆65竖直运动,直至反射式红外传感器62与下一
发射板检测处于同一直线,对龙骨架9进行自动调平工作。
38.本技术还提供了一种预埋滑槽式吊顶的施工方法,参照图1和2,包括如下步骤:步骤1:创建bim模型,根据厂房计算出龙骨架9、天花板10安装面积,对应龙骨架9所需的钢绞线7数量、滑轨1数量,以及钢绞线7安装位置、滑轨1安装位置;步骤2:浇筑楼板11;将滑轨1固定于楼板11的钢筋笼内,并滑轨1的开口3端抵紧于模板内壁,在浇筑楼板11混凝土;步骤3:楼板11成型后,拆除模板,将所需数量的滑座4从入口段插入滑移至滑道2中,再对应在滑座4上连接连接杆;步骤4:依次将单组龙骨架9套接于对应的连接杆上,在利用限位件6抵接龙骨架9,对龙骨架9进行定位;步骤5:将天花板10逐个安装于龙骨架9内,构成完整的吊顶。
39.以上均为本技术的较佳实施例,并非依此限制本技术的保护范围,故:凡依本技术的结构、形状、原理所做的等效变化,均应涵盖于本技术的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1