抹灰机器人的制作方法
1.本技术属于抹灰装置技术领域,更具体地说,是涉及一种抹灰机器人。
背景技术:
2.传统建筑施工中对墙面的施工主要是依靠人工抹灰,人工抹灰需要人工将砂浆运送至不同楼层,再由人工将水泥砂浆等灰料抹到墙面上,不但劳动强度大、效率低,而且由于每个人的技术水平和力量不同,无法保证抹灰层的施工质量,致使抹出的墙面质量差异较大。
3.随着社会的进步,机械喷涂抹灰工艺将逐渐替代人工抹灰。机械喷涂抹灰就是把搅拌好的水泥砂浆等灰料,经振动筛倾入灰浆输送泵,通过管道,再借助于空气压缩机的压力,把水泥砂浆等灰料连续均匀地喷涂于墙面,然后通过过刮板对灰料刮平,完成抹灰饰面。机械喷涂抹灰虽然是通过机械喷涂装置取代了人力,能够大大降低工人的劳动强度,缩短施工时间,但是,通过机械喷涂附着到墙上的灰料并不密实,灰料与墙体间存在很多疏松的间隙,在灰料固化后,这些间隙就形成了空鼓现象,无法满足抹灰的施工验收的质量要求。
技术实现要素:
4.本技术实施例的目的在于提供一种抹灰装置及抹灰机器人,以解决现有技术中存在的灰料刮平过程中灰料与墙体间存在疏松间隙的技术问题。
5.为实现上述目的,本技术采用的技术方案是提供一种抹灰机器人,包括:
6.超声机构,用于产生超声波振动;
7.行走机构,连接于所述超声机构,用于带动所述超声机构行走;
8.执行机构,连接于所述超声机构,用于在所述超声机构的带动下贴合于物料,以刮平物料。
9.一实施例中,所述超声机构包括:
10.超声波发生件,连接于所述行走机构和所述执行机构,用于产生超声波振动;
11.超声波放大件,连接于所述超声波发生件,用于放大所述超声波振动以振实物料。
12.一实施例中,所述超声波放大件包括:
13.连接部,连接于所述超声波发生件;
14.振动部,与所述连接部连接并与所述连接部间隔,用于放大所述超声波振动以振实物料。
15.一实施例中,所述行走机构包括:
16.平移机构,用于驱动所述超声机构在第一方向运动;
17.升降机构,连接于所述超声机构和所述平移机构,用于驱动所述超声机构在所述第二方向运动,所述第二方向垂直于所述第一方向。
18.一实施例中,所述升降机构包括:
19.第一升降机构,连接于所述超声波发生件,用于驱动所述超声机构在所述第二方向运动;
20.第二升降机构,与所述第一升降机构连接,用于驱动所述第一升降机构在所述第二方向运动。
21.一实施例中,所述第一升降机构包括:
22.动力柱,沿所述第二方向延伸;连接于所述第二升降机构,用于在所述第二升降机构的带动下沿所述第二方向运动;
23.第一滑座,连接于所述超声波发生件和所述动力柱,用于带动所述超声波发生件沿所述动力柱的延伸方向运动。
24.一实施例中,所述第二升降机构包括:
25.定力柱,沿所述第二方向延伸,连接于所述平移机构;
26.第二滑座,连接于所述动力柱和所述定力柱,用于带动所述动力柱沿所述定力柱延伸方向运动。
27.一实施例中,所述行走机构还包括:
28.限位机构,用于限定所述超声机构沿所述第二方向运动。
29.一实施例中,所述限位机构包括:
30.第一限位件,连接于所述动力柱,用于限定所述第一滑座相对于所述动力柱沿所述第二方向运动;
31.第二限位件,连接于所述定力柱,用于限定所述动力柱相对于所述定力柱沿所述第二方向运动。
32.一实施例中,还包括:
33.定位件,连接于所述行走机构,用于获取所述行走机构与目标墙壁之间的间距信息;
34.控制件,连接于所述定位件,用于接收所述间距信息,并依据所述间距信息控制所述行走机构运动。
35.本技术提供的抹灰机器人的有益效果在于:与现有技术相比,本技术的抹灰机器人包括用于产生超声波的超声机构,在执行机构沿预设路径对灰料进行刮平过程中,超声机构产生的超声波用于振实物料,使物料内部的缝隙消失,提高物料的紧实度;同时,在超声波的振动作用下,物料的流动性增强,执行机构在对物料刮平时的刮平力减小,便于对物料刮平。
附图说明
36.为了更清楚地说明本技术实施例中的技术方案,下面将对实施例或现有技术描述中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本技术的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动性的前提下,还可以根据这些附图获得其他的附图。
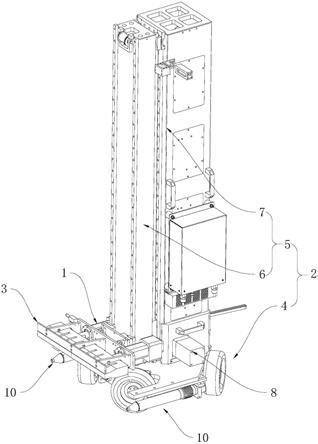
37.图1为本技术实施例提供的抹灰机器人的示意图一;
38.图2为本技术实施例提供的抹灰机器人的示意图二;
39.图3为本技术实施例提供的抹灰机器人的示意图三;
40.图4为本技术实施例提供的抹灰机器人的爆炸图一;
41.图5为本技术实施例提供的抹灰机器人的爆炸图二;
42.图6为本技术实施例提供的抹灰机器人的剖视图;
43.图7为本技术实施例提供的超声波模具的示意图;
44.图8为本技术实施例提供的密封箱的剖视图;
45.其中,图中各附图标记:
46.1、超声机构;2、行走机构;3、执行机构;4、平移机构;5、升降机构; 6、第一升降机构;7、第二升降机构;8、驱动机构;9、限位机构;10、定位件;11、超声波模具;12、密封箱;
47.101、超声波发生件;102、超声波放大件;
48.1011、超声驱动器;1012、超声波振子;
49.1021、连接部;1022、振动部;
50.401、底板;402、转动电机;403、滚轮;
51.601、动力柱;602、第一滑座;603、第一滑轨;
52.701、定力柱;702、第二滑座;703、第二滑轨;
53.801、驱动电机;802、带轮;803、第一导轮;804、第二导轮;805、第三导轮;
54.901、第一限位件;902、第二限位件。
具体实施方式
55.为了使本技术所要解决的技术问题、技术方案及有益效果更加清楚明白,以下结合附图及实施例,对本技术进行进一步详细说明。应当理解,此处所描述的具体实施例仅仅用以解释本技术,并不用于限定本技术。
56.需要说明的是,当元件被称为“固定于”或“设置于”另一个元件,它可以直接在另一个元件上或者间接在该另一个元件上。当一个元件被称为是“连接于”另一个元件,它可以是直接连接到另一个元件或间接连接至该另一个元件上。
57.需要理解的是,术语“长度”、“宽度”、“上”、“下”、“前”、“后”、“左”、“右”、“竖直”、“水平”、“顶”、“底”、“内”、“外”等指示的方位或位置关系为基于附图所示的方位或位置关系,仅是为了便于描述本技术和简化描述,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本技术的限制。
58.此外,术语“第一”、“第二”仅用于描述目的,而不能理解为指示或暗示相对重要性或者隐含指明所指示的技术特征的数量。由此,限定有“第一”、“第二”的特征可以明示或者隐含地包括一个或者更多个该特征。在本技术的描述中,“多个”的含义是两个或两个以上,除非另有明确具体的限定。
59.请参阅图1,现对本技术实施例提供的抹灰机器人进行说明
60.本技术提供的抹灰机器人,包括超声机构1、行走机构2和执行机构3。超声机构1用于产生超声波振动。行走机构2连接于超声机构,用于带动超声机构1行走。执行机构3连接于超声机构1,用于在超声机构1的带动下贴合于物料,以刮平物料。
61.本技术提供的抹灰机器人与现有技术相比,在执行机构3沿预设路径对灰料进行刮平过程中,超声机构1产生的超声波用于振实物料,使物料内部的缝隙消失,提高物料的紧实度;同时,在超声波的振动作用下,物料的流动性增强,执行机构3在对物料刮平时的刮
平力减小,便于对物料刮平。
62.在本技术中,请参阅图1和图2,行走机构2包括平移机构4和升降机构5。其中,平移机构4用于驱动超声机构1在第一方向运动。升降机构5连接于超声机构1和平移机构4,用于驱动超声机构1在第二方向运动,第二方向垂直于第一方向。
63.具体的,第一方向为图1所示的水平方向,第二方向为图1所示的竖直方向。平移机构4包括底板401、转动电机402、滚轮403,升降机构5连接于底板401的上表面,转动电机402为四个,且每个转动电机402的固定部固定连接于底板401的下表面,每个转动电机402的转动部与所对应的滚轮403连接。转动电机402驱动滚轮403转动,使升降机构5带动超声机构1和执行机构3 在水平方向运动,升降机构5带动超声机构1和执行机构3在竖直方向运动,是执行机构3对刮平物料,超声装置产生超声波振实物料,使物料内部的缝隙消失,提高物料的紧实度。
64.在本技术的一个实施例中,请参阅图1至图3,升降机构5包括第一升降机构6和第二升降机构7。第一升降机构6连接于超声机构1,用于驱动超声机构1在第二方向运动。第二升降机构7与第一升降机构6连接,用于驱动第一升降机构6在第二方向运动。
65.在本技术中,第一升降机构6包括动力柱601和第一滑座602,第二升降机构7包括定力柱701和第二滑座702,定力柱701固定于底板401的上表面,第一滑座602和第二滑座702分别位于动力柱601的两侧。超声波机构连接于第一滑座602,定力柱701沿竖直方向延伸。
66.动力柱601上设有第一滑轨603,第一滑座602滑动连接于第一滑轨603,使第一滑座602能够沿竖直方向运动,从而使超声机构1与执行机构3运动沿竖直方向运动,实现对物料振实和刮平。
67.第二滑座702固定于动力柱601的底端,定力柱701上固定有第二滑轨703,第二滑座702与第二滑轨703滑动连接,使第二滑座702带动定力柱701在竖直方向移动,从而提高超声机构1和执行机构3的在竖直方向的运动高度。
68.在本技术的一个实施例中,请参阅图1,升降机构5中设还设有驱动机构8,驱动机构8用于驱动第一滑座602和动力柱601在第二方向上移动。
69.在本技术中,请参阅图4至图6,驱动机构8包括驱动电机801、带轮802、驱动带、导向轮,动力柱601内部设有容纳腔,容纳腔沿竖直方向延伸,驱动电机801位安装于容纳腔的底部,驱动电机801的固定部固定在底板401的上表面,驱动电机801的转动部连接有带轮802。
70.导向轮包括第一导轮803、第二导轮804、第三导轮805。第一导轮803转动连接于定力柱701的顶部;第二导轮804转动连接于动力柱601的底部,并位于第二滑座702与动力柱601所连接的一侧;第三导轮805转动连接于动力柱601的顶部,并位于第一滑座602与动力柱601所连接的一侧。
71.驱动带包括第一端和第二端,第一端固定于带轮802,第二端依次环绕第一导轮803、第二导轮804、第三导轮805后与第一滑座602固定连接。
72.驱动电机801转动,带轮802收卷驱动带,使第一滑座602上升,第一滑座602上升时带动超声机构1和执行机构3上升。第一滑座602上升,第一端带动第一滑座602沿竖直方向运动至动力柱601顶部,随后动力柱601带动第二滑座702沿竖直方向运动至定力柱701的顶
部。随后,驱动电机801反转,带轮802对驱动带放料,在重力作用下,动力柱601带动第二滑座702带动沿竖直方向运动至定力柱701的底部,然后第一滑座602带动超声机构1和执行机构3运动至动力柱601的底部。
73.在本技术的一个实施例中,行走机构2还包括限位机构9,限位机构9用于限定超声机构1沿第二方向运动。
74.在本技术中,请参阅图1和图2,限位机构9包括第一限位件901和第二限位件902,第一限位件901和第二限件均为限位板。
75.第一限位件901连接于动力柱601的顶端,并位于第一滑轨603所在的侧面,当第一滑座602带动超声机构1和执行机构3运动至动力柱601的顶部时,第一滑座602与第一限位件901抵接,用于限定第一滑座602相对于动力柱601 沿竖直方向的运动距离。
76.第二限位件902连接于定力柱701的顶端,并位于第二滑轨703所在的侧面,当第二滑座702带动动力柱601运动至定力柱701的顶部时,第二滑座702 与第二限位件902抵接,用于限定动力柱601相对于定力柱701沿第竖直方向的运动距离。
77.在本技术的一个实施例中,请参阅图1和图2,该抹灰机器人还包括定位件10和控制件。定位件10连接于行走机构2,用于获取行走机构2与目标墙壁之间的间距信息。控制件连接于定位件10,用于接收间距信息,并依据间距信息控制行走机构2运动。
78.在本技术中,请参阅图1和图2,定位件10为回弹测距仪,控制件为控制器,且回弹测距仪的数目为两个,两个回弹测距仪对称设置在底板401的两侧,用于与目标墙壁抵接,从而获得该抹灰机器人上的执行机构3在在对目标墙面抹灰时,底板401相对于目标墙壁之间的间距信息,并传递给控制器,控制器依据间距信息控制转动电机402转动,从而调节该抹灰机器人与目标墙壁间的距离。
79.在本技术的一个实施例中,请参阅图1和图2,超声机构1包括超声波发生件101和超声波放大件102。超声波发生件101连接于行走机构2和执行机构3,用于产生超声波振动。超声波放大件102连接于超声波发生件101,用于放大超声波振动以振实物料。其中,超声波放大件102包括连接部1021和振动部1022。连接部1021连接于超声波发生件101。振动部1022与连接部1021 连接并与连接部1021间隔,用于放大超声波振动以振实物料。
80.在本技术中,请参阅图2,超声波发生件101包括超声驱动器1011和超声波振子1012,超声驱动器1011用于产生20khz左右的超声频电信号,超声波振子1012把超声驱动器1011产生的超声频电信号转化为超声振动。
81.在本技术申请的一个实施例中,请参阅图2、图3和图7,超声波放大件 102为超声波模具11,执行机构3为刮板,刮板与超声波振子1012连接,并位于超声波模具11的上方。连接部1021为超声波模具11的设有连接孔的一端,超声波振子1012连接于连接孔内,振动部1022为超声波模具11远离连接部 1021的一端的端面。
82.在本技术的另一实施例中,请参阅图3和图8,超声波放大件102为呈长方体结构的密封箱12,密封箱12的内部设有安装腔,安装腔内安装有多个超声波振子1012,多个超声波振子1012沿密封箱12的延伸方向依次间隔。连接部1021位于密封箱12的一个侧壁,执行机构3为密封箱12的另一侧壁,振动部1022和执行机构3位于密封箱12的同一个侧壁,振动部1022和执行机构3 所在的侧壁和连接部1021所在侧壁相对立。
83.以上仅为本技术的较佳实施例而已,并不用以限制本技术,凡在本技术的精神和
原则之内所作的任何修改、等同替换和改进等,均应包含在本技术的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1