一种三角形无死角抹平机器人的制作方法
1.本实用新型涉及建筑技术领域,具体为一种三角形无死角抹平机器人。
背景技术:
2.在抹平砂浆的过程中,如果混凝土表面质量要求非常高的情况下,需要对混凝土表面进行补浆甚至补充砂浆其他原料,因此还需要开发能够补浆的抹平机,cn201921005313.0公开了一种可以补浆的抹平机,但是几乎所有的电动抹平机都无法实现墙角之类的死角处抹平,这些地方只能靠人工来处理,劳动强度大、工作效率低。
技术实现要素:
3.(一)解决的技术问题
4.针对现有技术的不足,本实用新型提供了一种三角形无死角抹平机器人,解决了上述背景技术中提出的问题。
5.(二)技术方案
6.为实现以上目的,本实用新型通过以下技术方案予以实现:包括移动箱,所述移动箱的顶部中间固定连接有控制箱,所述控制箱的一侧面固定连接有充电板,所述移动箱的底部中间开设有三角槽,所述三角槽的侧壁通过轴承活动连接有转轴,所述转轴的一端通过联轴器传动连接有行走电机,所述行走电机有三个,三个所述行走电机通过转轴分别动力连接有第一行进轮、第二行进轮、第三行进轮,所述第一行进轮、第二行进轮、第三行进轮的侧面均设置有防滑柱;所述三角槽的顶部固定连接有蓄电池,所述移动箱的内底壁通过电机架固定连接有抹平电机,所述抹平电机的输出轴键连接有抹平轮,所述控制箱的侧面设置有与抹平电机相适配的电机箱,所述移动箱的侧面顶部固定连接有触碰开关,所述移动箱的内侧壁固定连接有与触碰开关电连接的控制器,所述控制器通过导线与行走电机电连接。
7.可选的,所述三角槽的轮廓线与移动箱外壁两个相邻的轮廓线分别组成三十度和六十度的夹角。
8.可选的,所述触碰开关包括第一触碰开关、第二触碰开关、第三触碰开关、第四触碰开关、第五触碰开关、第六触碰开关。
9.可选的,所述第一触碰开关、第二触碰开关为第一组,所述第三触碰开关、第四触碰开关为第二组,所述第五触碰开关、第六触碰开关为第三组,三组开关在移动箱的三个角对称设置。
10.可选的,所述控制箱的顶部中间固定连接有控制面板,所述控制面板的顶部一侧设置有显示面板,所述控制面板的顶部另一侧设置有控制按键,所述控制面板通过导线与蓄电池、行走电机、控制器、抹平电机电连接。
11.可选的,所述充电板的外侧面设置有充电口,所述充电口包括usb接口和type-c接口,所述充电板的通过导线与蓄电池电连接。
12.三有益效果
13.本实用新型提供了一种三角形无死角抹平机器人,具备以下有益效果:
14.1、该三角形无死角抹平机器人,通过设置抹平轮,能够在机器人自动行走的时候对地面的水泥进行抹平,并且三个抹平轮之间的抹平轨迹重合,不会造成抹平盲点,同时利用第一行进轮、第二行进轮、第三行进轮之间的配合,能够使机器人自动工作,达到沿着墙壁自动工作的目的。
15.2、该三角形无死角抹平机器人,通过设置触碰开关,能够通过墙壁触碰到的开关对内部的行走电机进行控制,在遇到拐角的时候能够通过控制第一行进轮、第二行进轮、第三行进轮之间的配合使机器人发生转动,从而自动对墙角抹平后进行拐弯,实现墙角无死角抹平的目的。
附图说明
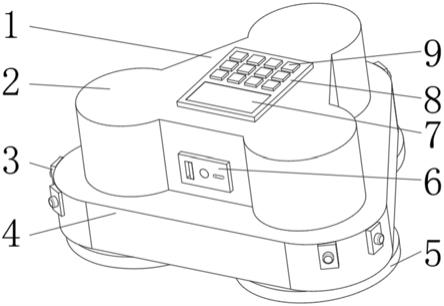
16.图1为本实用新型俯视立体结构示意图;
17.图2为本实用新型仰视立体结构示意图;
18.图3为本实用新型仰视结构示意图;
19.图4为本实用新型侧视剖面结构示意图。
20.图中:1、控制箱;2、电机箱;3、触碰开关;301、第一触碰开关;302、第二触碰开关;303、第三触碰开关;304、第四触碰开关;305、第五触碰开关;306、第六触碰开关;4、移动箱;5、抹平轮;6、充电板;7、显示面板; 8、控制面板;9、控制按键;10、三角槽;11、第一行进轮;12、第二行进轮;13、第三行进轮;14、蓄电池;15、行走电机;16、电机架;17、控制器;18、抹平电机。
具体实施方式
21.下面将结合本实用新型实施例中的附图,对本实用新型实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本实用新型一部分实施例,而不是全部的实施例。
22.请参阅图1至图4,本实用新型提供一种技术方案:一种三角形无死角抹平机器人,包括移动箱4,移动箱4的顶部中间固定连接有控制箱1,控制箱 1的一侧面固定连接有充电板6,移动箱4的底部中间开设有三角槽10,三角槽10的轮廓线与移动箱4外壁两个相邻的轮廓线分别组成三十度和六十度的夹角,三角槽10的侧壁通过轴承活动连接有转轴,转轴的一端通过联轴器传动连接有行走电机15,行走电机15有三个,三个行走电机15通过转轴分别动力连接有第一行进轮11、第二行进轮12、第三行进轮13,第一行进轮11、第二行进轮12、第三行进轮13的侧面均设置有防滑柱;三角槽10的顶部固定连接有蓄电池14,移动箱4的内底壁通过电机架16固定连接有抹平电机 18,抹平电机18的输出轴键连接有抹平轮5,控制箱1的侧面设置有与抹平电机18相适配的电机箱2,移动箱4的侧面顶部固定连接有触碰开关3,触碰开关3包括第一触碰开关301、第二触碰开关302、第三触碰开关303、第四触碰开关304、第五触碰开关305、第六触碰开关306,第一触碰开关301、第二触碰开关302为第一组,第三触碰开关303、第四触碰开关304为第二组,第五触碰开关305、第六触碰开关306为第三组,三组开关在移动箱4的三个角对称设置,移动箱4的内侧壁固定连接有与触碰开关3电连
接的控制器17,控制器17通过导线与行走电机15电连接,控制箱1的顶部中间固定连接有控制面板8,控制面板8的顶部一侧设置有显示面板7,控制面板8的顶部另一侧设置有控制按键9,控制面板8通过导线与蓄电池14、行走电机15、控制器17、抹平电机18电连接,充电板6的外侧面设置有充电口,充电口包括 usb接口和type-c接口,充电板6的通过导线与蓄电池14电连接。
23.使用时,首先通过控制面板8控制行进方向,同时打开三个抹平电机18 使三个抹平轮5转动进行抹平,将机器人放在挨着墙壁的位置,利用第二行进轮12、第三行进轮13两个轮滚动进行前进,第二行进轮12、第三行进轮 13之间设置的夹角使左右方向上的力抵消,能够保证机器人沿着墙壁的方向移动,使第二触碰开关302、第三触碰开关303贴紧墙壁,在到达墙壁拐角的位置之后,第一触碰开关301触碰墙壁,在控制器17的控制下使第三行进轮 13停止转动,在第二行进轮12的独自带动下机器人发生转动,在第六触碰开关306触碰前方墙壁的时候,第二行进轮12停止转动,第一行进轮11和第三行进轮13转动带动机器人继续沿着墙壁直线运动,再次遇到拐角的时候,第五触碰开关305首先触碰墙壁,机器人以同样的原理转动,在运动过程中三个抹平轮5始终保证对地面的水泥进行抹平。
24.综上,本装置通过设置抹平轮5,能够在机器人自动行走的时候对地面的水泥进行抹平,并且三个抹平轮5之间的抹平轨迹重合,不会造成抹平盲点,同时利用第一行进轮11、第二行进轮12、第三行进轮13之间的配合,能够使机器人自动工作,达到沿着墙壁自动工作的目的,通过设置触碰开关3,能够通过墙壁触碰到的开关对内部的行走电机15进行控制,在遇到拐角的时候能够通过控制第一行进轮11、第二行进轮12、第三行进轮13之间的配合使机器人发生转动,从而自动对墙角抹平后进行拐弯,实现墙角无死角抹平的目的。
25.以上所述,仅为本实用新型较佳的具体实施方式,但本实用新型的保护范围并不局限于此,任何熟悉本技术领域的技术人员在本实用新型揭露的技术范围内,根据本实用新型的技术方案及其实用新型构思加以等同替换或改变,都应涵盖在本实用新型的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1