一种智能立体车库
1.本实用新型涉及停车库领域,尤其涉及一种智能立体车库。
背景技术:
2.车库,一般是指人们用来停放汽车的地方,而随着经济的发展,城市建设的现代化水平越来越高,更多的人选择购买机动车,而不断增长的机动车数量和缓慢发展的停车位建设之间形成了鲜明的对比,使得“停车难”成为了越来越多的有车族需要面对的问题,“停车难”问题也成为了城市建设中亟待解决的“城市病”。
3.而机械式立体停车库作为城市停车场的一种新形势,占地少、空间利用高、管理方便的优势使它成为了未来城市停车改革中的重要方向,具有非常广阔的发展前景。
4.相关技术中,机械式立体停车库一般是安装在停车场内部的,而并不能很好的应用于室外匮乏的停车位中,其使用范围有限,另外,其一个单体一般一次只能停放上下两辆汽车,停车数量较少,且需要多个单体并排组成停车库,而每个单体中均需要使用到一套驱动机构、提升机构等重要机构,使得停车库的使用成本大大增加,且多只具备上下提升功能,整体的智能化程度较低,在使用时不够灵活方便,并不能很好的满足人们的使用需求。
5.因此,有必要提供一种智能立体车库解决上述技术问题。
技术实现要素:
6.本实用新型提供一种智能立体车库,解决了机械式立体停车库单体的停车数量较少的问题。
7.为解决上述技术问题,本实用新型提供的智能立体车库,包括:
8.主体架;
9.旋转结构,所述旋转结构设置于所述主体架上,所述旋转结构包括导轨架、升降组件、转动组件、旋转平台;
10.其中,所述导轨架固定安装于所述主体架的一侧,所述升降组件设置于所述导轨架上,所述转动组件滑动于所述导轨架的外部,所述旋转平台固定安装于所述转动组件上,所述旋转平台的一侧开设有第一通过槽,所述升降组件与所述转动组件连接;
11.平移结构,所述平移结构设置于所述主体架上,所述平移结构包括移动架、提升平台、水平驱动组件、竖直驱动组件;
12.其中,所述移动架与所述水平驱动组件均设置于所述主体架上,所述提升平台滑动于所述移动架的内侧,所述水平驱动组件与所述移动架连接,所述竖直驱动组件与所述提升平台连接,所述提升平台的一侧开设有第二通过槽;
13.放置平台,所述放置平台固定安装于所述主体架内侧,所述放置平台的一侧开设有第三通过槽。
14.优选的,所述升降组件包括步进电机、蜗轮蜗杆减速器以及传动链条,所述传动链条设置于所述导轨架上,且所述传动链条与所述转动组件主体连接。
15.优选的,所述蜗轮蜗杆减速器固定安装于所述导轨架左侧的底部,所述步进电机与所述蜗轮蜗杆减速器的输入端连接,所述蜗轮蜗杆减速器的输出端与所述传动链条的输入端连接。
16.优选的,所述转动组件用于带动所述旋转平台在水平方向上转动,所述旋转平台在不使用时位于所述主体架的顶部,且所述旋转平台与所述导轨架保持垂直状态。
17.优选的,所述移动架位于所述主体架内壁的前后两侧之间,所述竖直驱动组件的数量设置有两个,且两个所述竖直驱动组件分别设置于所述移动架内壁的前后两侧,且所述提升平台的两侧分别与两个所述竖直驱动组件连接。
18.优选的,所述水平驱动组件包括双轴电机、第一传动轴、驱动链条、滑杆以及第二传动轴,所述双轴电机固定安装于所述主体架上,所述第一传动轴固定安装于所述双轴电机的输出端,所述第一传动轴的另一端与所述驱动链条连接。
19.优选的,所述第二传动轴与所述驱动链条的另一侧连接,且所述第二传动轴一端与所述主体架的一侧转动连接,所述移动架的一侧与所述滑杆外部滑动连接,所述驱动链条与所述移动架的一侧固定安装。
20.优选的,所述第一传动轴、所述驱动链条、所述滑杆以及所述第二传动轴的数量均设置有两个,且两个所述驱动链条分别位于移动架的前后两侧。
21.与相关技术相比较,本实用新型提供的智能立体车库具有如下有益效果:
22.本实用新型提供一种智能立体车库,通过旋转结构、平移结构、主体架以及放置平台配合使用,构成智能立体车库结构,能够实现快速停车、取车,并同时具备八个停车位置,改变了传统的械式立体停车库结构设计,在具备更多的停车位同时,只是用一套驱动机构,进而大大降低了车库的使用成本,不仅适用于地下停车场,还可以与室外停车位配合使用,能够大大增加停车位置,进而更好的满足人们的停车需求,同时该车库通过电器控制,实现自动化停车和取车操作,且上下车位活互不干扰,能够直接安装在室外已有车位上方,在使用时十分方便。
附图说明
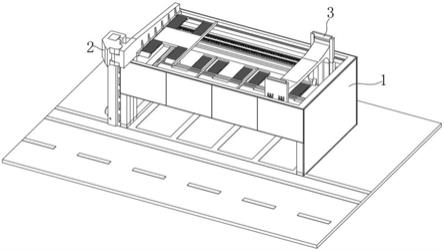
23.图1为本实用新型提供的智能立体车库的结构示意图;
24.图2为图1所示的旋转结构和平移结构外部的结构示意图;
25.图3为图2所示的旋转结构外部的结构示意图;
26.图4为图2所示的移动架内部的结构示意图;
27.图5为本实用新型提供的智能立体车库顶部的结构示意图。
28.图中标号:
29.1、主体架;
30.2、旋转结构;
31.21、导轨架,22、升降组件,23、转动组件,24、旋转平台,25、第一通过槽;
32.221、步进电机,222、蜗轮蜗杆减速器,223、传动链条;
33.3、平移结构;
34.31、移动架,32、提升平台,33、水平驱动组件,34、竖直驱动组件, 35、第二通过槽;
35.331、双轴电机,332、第一传动轴,333、驱动链条,334、滑杆,335、第二传动轴;
36.4、放置平台,5、第三通过槽。
具体实施方式
37.下面结合附图和实施方式对本实用新型作进一步说明。
38.请结合参阅图1、图2、图3、图4和图5,其中,图1为本实用新型提供的智能立体车库的结构示意图;图2为图1所示的旋转结构和平移结构外部的结构示意图;图3为图2所示的旋转结构外部的结构示意图;图4为图2 所示的移动架内部的结构示意图;图5为本实用新型提供的智能立体车库顶部的结构示意图;图5为本实用新型提供的智能立体车库顶部的结构示意图。智能立体车库,包括:
39.主体架1;
40.旋转结构2,所述旋转结构2设置于所述主体架1上,所述旋转结构2包括导轨架21、升降组件22、转动组件23、旋转平台24;
41.其中,所述导轨架21固定安装于所述主体架1的一侧,所述升降组件22 设置于所述导轨架21上,所述转动组件23滑动于所述导轨架21的外部,所述旋转平台24固定安装于所述转动组件23上,所述旋转平台24的一侧开设有第一通过槽25,所述升降组件22与所述转动组件23连接;
42.平移结构3,所述平移结构3设置于所述主体架1上,所述平移结构3包括移动架31、提升平台32、水平驱动组件33、竖直驱动组件34;
43.其中,所述移动架31与所述水平驱动组件33均设置于所述主体架1上,所述提升平台32滑动于所述移动架31的内侧,所述水平驱动组件33与所述移动架31连接,所述竖直驱动组件34与所述提升平台32连接,所述提升平台32的一侧开设有第二通过槽35;
44.放置平台4,所述放置平台4固定安装于所述主体架1内侧,所述放置平台的一侧开设有第三通过槽5。
45.主体架1是由金属钢材组装成的长方体框架结构,作为停车库的主体,且在停车库的外侧安装有挡板,用于对主体架1进行密封;
46.旋转结构2用于对汽车进行转运,将其转移至由放置平台4构成的二层放置区域中,导轨架21固定安装在主体架1左侧的前侧位置,作为转动组件 23的升降轨道,而转动组件23主体通过与导轨架21外部滑动连接,能够在导轨架21的外部竖直方向移动,升降组件22主要用于带动转动组件23在竖直方向移动,其中升降组件22内部的步进电机221型号为tb6600升级版,是一款适用于57/42型相电流4.oa以下两相混合式步进电机的驱动器,作为主要动力输出,而通过使用蜗轮蜗杆减速器222与步进电机221连接,作用主要有降速同时提高输出扭矩,扭矩输出比例按电机输出乘减速比,但要注意不能超出减速机额定扭矩;减速同时降低了负载的惯量,惯量的减少为减速比的平方。大家可以看一下一般电机都有一个惯量数值;且蜗轮蜗杆减速器的特点:齿轮-蜗轮蜗杆减速机是一种结构紧凑、传动比大,在一定条件下具有自锁功能的传动机械,而且安装方便、结构合理,得到越来越广泛的应用,它是在蜗轮蜗杆减速器输入端加装一个斜齿轮减速器,构成的多级减速器可获得非常低的输出速度,比单级蜗轮减速机具有更高的效率,而且振动小、噪声及能低等,传动链条223竖直安装在导轨架21上,且外部通过与转动组件23连接,使得传动链条在运转时,同时带动转动组件23移动,旋转平台24通过与转动组件23固定安装,通过转动组件23转动,使得
旋转平台 24可以转动,且旋转平台24用于放置汽车,其大小与大部分汽车适配,能够带动汽车移动至放置平台4上进行放置;
47.平移结构3位于主体架1上半部分位置,用于将旋转平台24转运上来的汽车进行转移,将汽车准确的放置在放置平台4空闲位置上,同时在取车时,能够将汽车转移至旋转平台24上,移动架31与主体架1适配设置,可以在主体架1的内侧水平方向左右移动,提升平台32位于主体架1的内侧,通过安装在移动架31内部的竖直驱动组件34,使得提升平台32可以在移动架31 的内侧竖直方向移动,竖直驱动组件34为液压杆,水平驱动组件33通过与移动架31连接,能够带动移动架31在主体架1上水平方向移动,提升平台 32主要用于带动汽车在竖直方向移动,对旋转平台24上的汽车进行转运,且在提升平台32开设的第二通过槽35均匀分布在其顶部,与旋转平台24上的第一通过槽25正好交错设置,使得提升平台32能够从竖直方向顺利通过旋转平台24,进而实现对汽车的放置和抬起转移,在该车库中使用电器控制,其中电子部分采用stm32f103rct6系统板,内核:arm32位cortex-m3cpu,最高工作频率72mhz,1.25dmips/mhz,单周期乘法和硬件除法,存储器:片上集成32-512kb的flash存储器;6-64kb的sram存储器,时钟、复位和电源管理:2.0-3.6v的电源供电和i/o接口的驱动电压,上电复位(por)、掉电复位(pdr)和可编程的电压探测器(pvd),4-16mhz的晶振,内嵌出厂前调校的8mhzrc振荡电路,内部40khz的rc振荡电路,用于cpu时钟的pll,带校准用于rtc的32khz的晶振,低功耗:3种低功耗模式:休眠,停止,待机模式,为rtc和备份寄存器供电的vbat,调试模式:串行调试 (swd)和jtag接口,dma:12通道dma控制器。支持的外设:定时器, adc,dac,spi,iic和uart,3个12位的us级的a/d转换器(16通道): a/d测量范围:0-3.6v,双采样和保持能力,片上集成一个温度传感器,2个通道12位d/a转换器:stm32f103xc,stm32f103xd,stm32f103xe独有,最多高达112个的快速i/o端口:根据型号的不同,有26,37,51,80,和 112的i/o端口,所有的端口都可以映射到16个外部中断向量,除了模拟输入,所有的都可以接受5v以内的输入,最多多达11个定时器:4个16位定时器,每个定时器有4个ic/oc/pwm或者脉冲计数器,2个16位的6通道高级控制定时器:最多6个通道可用于pwm输出,2个看门狗定时器(独立看门狗和窗口看门狗),systick定时器:24位倒计数器,2个16位基本定时器用于驱动dac,最多多达13个通信接口:2个iic接口(smbus/pmbus), 5个usart接口(iso7816接口,lin,irda兼容,调试控制),3个spi接口(18mbit/s),两个和iis复用,can接口(2.0b),usb2.0全速接口sdio 接口;ecopack封装:stm32f103xx系列微控制器采用ecopack封装形式;
48.放置平台4固定安装在主体架1内部的中层位置,将主体架1分为上下两层,且下层为四个并排的停车位,而放置平台4上也可以停放四个汽车,在放置平台4开设的第三通过槽5均匀分布在每个停车位置上,且第三通过槽5与提升平台32上的第二通过槽35位置也是正好交错设置的,使得提升平台32能够在竖直方向通过放置平台4,进而能够实现将汽车放置在放置平台4以及从放置平台4上取出汽车,而放置平台4上设置有四个停车位,而放置平台4上的停车位不限于四个,可以根据实际的使用需求调整;
49.通过旋转结构2、平移结构3、主体架1以及放置平台4配合使用,构成智能立体车库结构,能够实现快速停车、取车,同时具备八个停车位置,改变了传统的械式立体停车库结构设计,不仅适用于地下停车场,还可以与室外停车位配合使用,能够大大增加停车位置,进而更好的满足人们的停车需求,同时该车库通过电器控制,实现自动化停车和取车操作,
且上下车位活互不干扰,能够直接安装在室外已有车位上方,在使用时十分方便,该停车场的设计主要放置在小区并排停放车辆的停车位或两侧面积较大的路边,转动梳齿机构设计,可以避免因驾驶技术问题出现汽车剐蹭,由于传统的车库仅为两层,多地面要求不高,只占用4个停车位可停放8两车,且不用改变原有停车位,即可以直接在小区进行车库建设,同时还可以进行模块化组装,可以并排延长,交叉平台设计不影响采光,即可建设在较长的绿化带上切不影响小区绿化,从而使小区更加宽敞整洁,另外停车取车方式为逐一停取互不干扰,所以停取车速度相对较快,节省时间。
50.所述升降组件22包括步进电机221、蜗轮蜗杆减速器222以及传动链条 223,所述传动链条223设置于所述导轨架21上,且所述传动链条223与所述转动组件23主体连接。
51.所述蜗轮蜗杆减速器22固定安装于所述导轨架21左侧的底部,所述步进电机221与所述蜗轮蜗杆减速器22的输入端连接,所述蜗轮蜗杆减速器22 的输出端与所述传动链条223的输入端连接。
52.所述转动组件23用于带动所述旋转平台24在水平方向上转动,所述旋转平台24在不使用时位于所述主体架1的顶部,且所述旋转平台24与所述导轨架21保持垂直状态。
53.所述移动架31位于所述主体架1内壁的前后两侧之间,所述竖直驱动组件34的数量设置有两个,且两个所述竖直驱动组件34分别设置于所述移动架31内壁的前后两侧,且所述提升平台32的两侧分别与两个所述竖直驱动组件34连接。
54.所述水平驱动组件33包括双轴电机331、第一传动轴332、驱动链条333、滑杆334以及第二传动轴335,所述双轴电机331固定安装于所述主体架1上,所述第一传动轴332固定安装于所述双轴电机331的输出端,所述第一传动轴332的另一端与所述驱动链条333连接。
55.所述第二传动轴335与所述驱动链条333的另一侧连接,且所述第二传动轴335一端与所述主体架1的一侧转动连接,所述移动架31的一侧与所述滑杆334外部滑动连接,所述驱动链条333与所述移动架31的一侧固定安装。
56.所述第一传动轴332、所述驱动链条333、所述滑杆334以及所述第二传动轴335的数量均设置有两个,且两个所述驱动链条333分别位于移动架31 的前后两侧。
57.本实用新型提供的智能立体车库的工作原理如下:
58.在使用时,先将主体架1下方位置的四个停车位停满车辆,之后开始在主体架1上方停车,通过启动旋转结构2,其中转动组件23先启动,带动旋转平台旋转九十度,然后升降组件22开始运行,带动旋转平台24在导轨架 21的外部向下移动,直至旋转平台24移动至与地面平齐,之后汽车行驶在旋转平台24上,驾驶人员和车内人员下车,此时通过升降组件22再次驱动旋转平台24上升,直至上升至导轨架21的顶部位置,然后转动组件23开始驱动旋转平台24转动九十度,使得旋转平台24正好位于主体架1的正上方,然后平移结构3开始启动,其中,通过水平驱动组件33运转,能够带动移动架31在主体架1上水平方向移动,使得提升平台32正好位于旋转平台24的底部,之后竖直驱动组件34开始启动,使得提升平台32开始在移动架31内侧向上移动,然后顺利依次通过放置平台4上的第三通过槽5以及旋转平台 24上的第一通过槽25,最终与汽车底部接触,并将汽车向上继续抬起,使其与旋转平台24分离,此时水平驱动组件33再次启动,使得平移结构3向右侧移动,直至移动至放置平台4右侧的停车位置的正上方,然后竖直驱动组件34再次运行,带动提升平台32在移动架31上向下移动,使得提升平台32 通过放置平台4上的第三通过槽5,而汽车正好落在放置平台4上的
停车位上,而提升平台32则在放置平台4的底部位置保持不变,此时完成对汽车的放置,重复上述操作,直至放置平台4上的停车位4全部放满即可,在取出时,按照上述步骤反向操作即可。
59.与相关技术相比较,本实用新型提供的智能立体车库具有如下有益效果:
60.通过旋转结构2、平移结构3、主体架1以及放置平台4配合使用,构成智能立体车库结构,能够实现快速停车、取车,并同时具备八个停车位置,改变了传统的械式立体停车库结构设计,在具备更多的停车位同时,只是用一套驱动机构,进而大大降低了车库的使用成本,不仅适用于地下停车场,还可以与室外停车位配合使用,能够大大增加停车位置,进而更好的满足人们的停车需求,同时该车库通过电器控制,实现自动化停车和取车操作,且上下车位活互不干扰,能够直接安装在室外已有车位上方,在使用时十分方便。
61.以上所述仅为本实用新型的实施例,并非因此限制本实用新型的专利范围,凡是利用本实用新型说明书及附图内容所作的等效结构或等效流程变换,或直接或间接运用在其它相关的技术领域,均同理包括在本实用新型的专利保护范围内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1