异形边界的单层曲面空间网壳的网格划分方法及空间网壳与流程
1.本发明涉及建筑空间结构,更具体地说,本发明涉及一种异形边界的单层曲面空间网壳的网格划分方法,以及由该网格划分方法形成的空间网壳。
背景技术:
2.空间网壳结构是建筑工程应用中较广泛的结构,是具有良好的工厂化生产、装配化施工应用前景的新型建筑体系。它可以广泛应用于各类大中小型建筑。
3.网壳结构又包括单层网壳结构、预应力网壳结构、板锥网壳结构、肋环型索承网壳结构、单层叉筒网壳结构等。
4.然而,现有的单层网壳结构,其杆件和节点的偏差对受力的均匀性、整体稳定性、施工的精确性有一定的影响,给单层网壳结构的应用造成了一定的困难。
技术实现要素:
5.为了克服上述的杆件和节点的偏差缺陷,本发明首先提出一种异形边界的单层曲面空间网壳的网格划分方法。该网格划分方法特别适合跨度不大于40米的非常规边界(异形边界)的单层曲面空间网壳结构的网格划分,并进而形成主次构件。
6.为了实现上述的目的,本发明采用以下技术方案:
7.一种异形边界的单层曲面空间网壳的网格划分方法,包含以下顺序的步骤:
8.步骤1、构建异形边界;
9.步骤2、在所述的异形边界内构建主梁线;
10.步骤3、构建一级次梁线;
11.步骤4、构建二级次梁线,从而完成平面分格图;
12.步骤5、平面分格图纵向延伸形成三维空间网壳分格图。
13.进一步地,所述的主梁线的间距为1.0~3.0米。
14.进一步地,所述的一级次梁线的间距为1.0~3.0米。
15.该异形边界的单层曲面空间网壳的网格划分方法,更具体的步骤如下:
16.首先给出单层曲面空间网壳平面投影图中的异形边界;
17.以异形边界较长边中某一起点为基准,沿着与较长边夹角为60度的方向做直线,并按1.0米~3.0米间距做一组平行线,此组平行线为主梁线;
18.以所述的起点为始点,沿着与第一根主梁线夹角为60度的方向做直线,然后按1.0米~3.0米间距做一组平行线,此组平行线为一级次梁线;
19.以主梁线与一级次梁线相交的交点为始点,与主梁线和一级次梁线的夹角均为60度做平行线组,此组平行线为二级次梁线;
20.将平面分格图与空间三维曲面在竖直方向上进行纵向延伸后,由异形边界、主梁线、一级次梁线、二级次梁线共同形成三维空间网壳分格图。
21.前述的起点,可以是异形边界较长边上的任意一点。
22.本发明还提出一种空间网壳,基于前述的异形边界的单层曲面空间网壳的网格划分方法所确定的三维空间网壳分格图,将网壳构件定位并相互连接。
23.进一步地,所述的连接为相贯焊接。
24.进一步地,所述的网壳构件包括以下构件:
25.基于异形边界确定位置的边梁;
26.基于主梁线确定位置的主梁;
27.基于一级次梁线确定位置的一级次梁;
28.以及
29.基于二级次梁线确定位置的二级次梁。
30.更进一步地,所述的主梁为连续构件。
31.更进一步地,所述的一级次梁相贯焊接于所述的主梁。
32.更进一步地,所述的二级次梁相贯焊接于所述的主梁与所述的一级次梁。
33.该空间网壳结构的特点是:
34.1)将网壳构件按受力级别分组:边界构件、主梁构件、一级次梁构件和二级次梁构件;
35.2)主次杆件焊接先后顺序为:主梁为连续构件,一级次梁相贯焊接于主梁,二级次梁相贯焊接于主梁与一级次梁。边梁选择较大的截面,保证主梁、一级或二级次梁与边梁可靠焊接,增大网架刚度和稳定性;网壳构件连接主次清晰,传力明确。
36.本发明的有益效果:
37.1)采用主梁连续贯通、构件之间以相贯焊接的连接方式,使得网壳空间造型流畅、优美,可达到近乎完美的建筑效果;
38.2)符合传统设计意义上的主次受力构件体系,将空间复杂传力体系通过主梁、一级次梁、二级次梁转化为构件层面的平面受力体系,传力方式简单、直接、明确。
39.3)综合考虑构件分组及布置,简化节点做法,归并构件类型,便于采购及大幅度降低加工施工难度,降低综合造价。
附图说明
40.图1为本发明的异形边界图。
41.图2为本发明的主梁线完成图。
42.图3是本发明的一级次梁线完成图。
43.图4是本发明的三维空间网壳分格图。
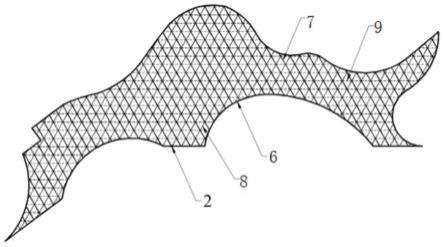
44.图5是本发明的空间网壳的俯视示意图。
45.附图标记说明:1.异形边界;2.起点;3.主梁线;4.一级次梁线;5.二级次梁线;6.边梁;7.主梁;8.一级次梁;9.二级次梁。
具体实施方式
46.实施例1:网格划分方法
47.如图1至图4所示,本发明的异形边界的单层曲面空间网壳的网格划分方法,具体步骤如下:
48.步骤1、构建异形边界;
49.首先给出单层曲面空间网壳平面投影图中的异形边界1,如图1所示;
50.步骤2、在异形边界内构建主梁线;
51.以异形边界1较长边中某一起点2为基准,沿着与较长边夹角为60度的方向做直线,并按3.0米间距做一组平行线,此组平行线为主梁线3,如图2所示;
52.步骤3、构建一级次梁线;
53.以所述的起点2为始点,沿着与第一根主梁线夹角为60度的方向做直线,然后按主梁线3同样的间距(即3.0米)做一组平行线,此组平行线为一级次梁线4,如图3所示;
54.步骤4、构建二级次梁线,从而完成平面分格图;
55.主梁线3与一级次梁线4相交的交点为始点,与主梁线3和一级次梁线4的夹角均为60度做平行线组,此组平行线为二级次梁线5;
56.步骤5、平面分格图纵向延伸形成三维空间网壳分格图。
57.将平面分格图与空间三维曲面在竖直方向(即z轴方向)上进行纵向延伸后,由异形边界1、主梁线3、一级次梁线4、二级次梁线5共同形成三维空间网壳分格图,如图4所示。
58.实施例2
59.实施例2与实施例1基本相同,不同之处在于,步骤2中,主梁线3的间距为2.0米;步骤3中,一级次梁线4的间距为2.0米。
60.实施例3
61.实施例2与实施例1基本相同,不同之处在于,步骤2中,主梁线3的间距为1.0米;步骤3中,一级次梁线4的间距为1.0米。
62.实施例4:空间网壳
63.如图5所示,本发明的空间网壳网格,以实施例1所述的网格划分方法所确定的三维空间网壳分格图,将网壳构件定位并相互连接。
64.前述的连接方式为相贯焊接。
65.所述的网壳构件包括以下构件:基于异形边界1确定位置的边梁6;基于主梁线3确定位置的主梁7;基于一级次梁线4确定位置的一级次梁8;以及,基于二级次梁线5确定位置的二级次梁9。
66.上述的主梁6为连续构件。
67.上述的一级次梁8相贯焊接于所述的主梁6。
68.上述的二级次梁9相贯焊接于所述的主梁6与所述的一级次梁8。
69.实施例5
70.本发明的空间网壳网格,以实施例2所述的网格划分方法所确定的三维空间网壳分格图,将网壳构件定位并相互连接。具体连接方式与实施例4相同。
71.实施例6
72.本发明的空间网壳网格,以实施例3所述的网格划分方法所确定的三维空间网壳分格图,将网壳构件定位并相互连接。具体连接方式与实施例4相同。
73.上述的实施例4至6中,边梁6均选择较大的截面,保证主梁7、一级次梁8或二级次梁9与边梁6可靠焊接,增大网架刚度和稳定性;网壳构件连接主次清晰,传力明确。
74.以上对本发明所涉及的异形边界的单层曲面空间网壳的网格划分方法及空间网
壳进行了详细介绍,本文中应用了具体个例对本发明的原理及实施方式进行了阐述,以上实施例的说明只是用于帮助理解本发明的方案及其核心思想。应当指出,本发明不限于上述的示例性实施例,本领域技术人员可在不偏离本发明的范围或精神的情况下做出多种改变和变型。同时,对于本领域的一般技术人员,依据本发明的思想,在具体实施方式及应用范围上均会有改变之处;因而,综上所述,本说明书内容不应理解为对本发明的限制。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1