一种回收站以及清洁装置的制作方法
一种回收站以及清洁装置
【技术领域】
[0001]
本实用新型涉及智能家居技术领域,特别涉及一种回收站以及清洁装置。
背景技术:
[0002]
在日常生活中,随着智能家居的普及,自动扫地机因实用性强深受消费者的喜爱。现有的清扫机器人通常会设有集尘盒,当集尘盒装满时,需要用户自己动手将集尘盒从清扫机器人上拆卸下来,倒出尘屑至垃圾桶,这种方式较为普遍,但是这种方式增加用户的劳务负担,不利于用户的生活体验。
技术实现要素:
[0003]
为了解决上述技术问题,本实用新型实施例提供一种回收站以及清洁装置,可以自动收集清扫机器人的集尘盒内的尘屑。
[0004]
本实用新型实施例解决其技术问题采用以下技术方案:
[0005]
第一方面,提供一种回收站,用于清扫机器人,所述回收站包括:
[0006]
基座,所述基座的侧壁上设有收容槽;
[0007]
抬升装置,所述抬升装置可转动地连接于所述基座,所述抬升装置用于抬升所述清扫机器人,以使所述清扫机器人收容于所述收容槽内;
[0008]
集尘装置,所述集尘装置设于所述基座内部,所述集尘装置用于所述清扫机器人收容于所述收容槽时回收所述清扫机器人收集的尘屑。
[0009]
可选地,所述抬升装置包括抬升座,所述抬升座的一端可转动地连接于所述基座,所述抬升座的另一端可相对于所述基座转动至收容于所述收容槽内;
[0010]
所述清扫机器人可收容于所述抬升座。
[0011]
可选地,所述抬升装置还包括抬升支架,所述抬升支架的两端分别可转动地连接所述抬升座和所述基座,所述抬升支架可带动所述抬升座相对于所述基座转动。
[0012]
可选地,所述抬升装置还包括电机,所述电机安装于所述基座;
[0013]
所述电机可驱动所述抬升支架转动。
[0014]
可选地,所述抬升装置还包括感应器,所述感应器设于所述抬升座;
[0015]
所述感应器用于感应到所述清扫机器人后触发开关使所述电机通电。
[0016]
可选地,所述集尘装置包括风机;
[0017]
所述基体的内部设有吸尘管道和集尘仓,所述吸尘管道包括第一吸尘端口和第二吸尘端口;
[0018]
所述吸尘管道的第一吸尘端口可与所述清扫机器人连接,所述吸尘管道的第二吸尘端口与所述集尘仓连通;
[0019]
所述风机设于所述集尘仓内,所述清扫机器人与所述第一吸尘端口连接时,所述风机开启工作可产生吸力将所述清扫机器人内的尘屑抽取至所述集尘仓。
[0020]
可选地,所述集尘装置还包括集尘袋,所述集尘袋设于所述集尘仓内,所述集尘袋
的袋口对准所述第二吸尘端口,用于储存所述风机吸取的尘屑。
[0021]
可选地,所述集尘袋包括袋体和袋口支架,所述袋口支架连接于所述袋体的袋口;
[0022]
所述第二吸尘端口的两侧分别设有卡槽,所述袋口支架卡设于所述卡槽内。
[0023]
可选地,所述集尘仓的一端设有储存槽;
[0024]
所述集尘袋的数量为至少一个,至少一个所述集尘袋依次连接并卷成团状;
[0025]
最外端的所述集尘袋的所述袋口支架设于所述卡槽内,其余所述集尘袋收容于所述储存槽。
[0026]
可选地,所述回收站还包括供电模块,所述供电模块设于所述抬升装置上;
[0027]
所述供电模块用于与所述清扫机器人连接时为所述清扫机器人充电。
[0028]
第二方面,提供一种清洁装置,包括:
[0029]
上述实施例中任一项所述的回收站;
[0030]
清扫机器人,所述清扫机器人的设有集尘盒和出尘口,所述集尘盒用于收集尘屑,所述出尘口将所述集尘盒与外部连通;
[0031]
所述清扫机器人收容于所述收容槽时,所述集尘装置与所述出尘口连通可回收所述集尘盒内的尘屑。
[0032]
与现有技术相比较,本实用新型实施例中,所述基座设有所述收容槽,所述抬升装置可转动地连接于所述基座,所述抬升装置抬升所述清扫机器人并使所述清扫机器人收容于所述收容槽内,可以使得所述清扫机器人在不工作时便于储存、节省空间,所述集尘装置设于所述基座内部,用于所述清扫机器人收容于所述收容槽时回收所述清扫机器人收集的尘屑,以使得所述回收站能够自动回收所述清扫机器人收集的尘屑,使用更加方便。
【附图说明】
[0033]
一个或多个实施例通过与之对应的附图进行示例性说明,这些示例性说明并不构成对实施例的限定,附图中具有相同参考数字标号的元件表示为类似的元件,除非有特别申明,附图中的图不构成比例限制。
[0034]
图1为本实用新型其中一实施例提供的一种清洁装置的结构示意图;
[0035]
图2为图1中的清扫机器人的结构示意图;
[0036]
图3为图2中的清扫机器人的另一个视角的结构示意图
[0037]
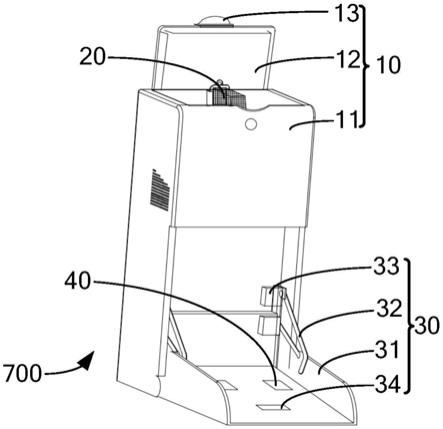
图4为图1中的回收站的结构示意图;
[0038]
图5为图4所示的回收站的另一个状态的结构示意图;
[0039]
图6为图5所示的回收站的另一个视角的结构示意图;
[0040]
图7为图6所示的回收站的另一个视角的结构示意图;
[0041]
图8为图7中的集尘袋的结构示意图;
[0042]
图9为图1所示的清洁装置的另一个视角的结构示意图;
[0043]
图10为图9所示的清洁装置的另一个状态的结构示意图。
【具体实施方式】
[0044]
为了便于理解本实用新型,下面结合附图和具体实施例,对本实用新型进行更详细的说明。需要说明的是,当元件被表述“固定于”另一个元件,它可以直接在另一个元件
上、或者其间可以存在一个或多个居中的元件。当一个元件被表述“连接”另一个元件,它可以是直接连接到另一个元件、或者其间可以存在一个或多个居中的元件。本说明书所使用的术语“垂直的”、“水平的”、“左”、“右”、“内”、“外”以及类似的表述只是为了说明的目的。
[0045]
除非另有定义,本说明书所使用的所有的技术和科学术语与属于本实用新型的技术领域的技术人员通常理解的含义相同。在本实用新型的说明书中所使用的术语只是为了描述具体的实施例的目的,不是用于限制本实用新型。本说明书所使用的术语“和/或”包括一个或多个相关的所列项目的任意的和所有的组合。
[0046]
此外,下面所描述的本实用新型不同实施例中所涉及的技术特征只要彼此之间未构成冲突就可以相互结合。
[0047]
请参阅图1,本实用新型其中一实施例提供一种清洁装置900,包括清扫机器人800和回收站700。所述清扫机器人800用于清扫地面的尘屑,所述回收站700用于为所述清扫机器人800充电并收回尘屑。
[0048]
请一并参阅图2和图3,所述清扫机器人800包括壳体801、清扫刷802、吸尘装置803以及充电模块。所述清扫刷802和所述吸尘装置803分别设于所述壳体801的底部,用于清扫和收集尘屑。所述壳体801内部设有集尘盒 (图未示),所述吸尘装置803与所述集尘盒连接,所述吸尘装置803可将地面的尘屑吸入所述集尘盒内。所述壳体801的顶部设有出尘口8010,所述出尘口8010与所述集尘盒连通。所述出尘口8010处设有软胶塞,所述软胶塞用于封闭所述出尘口8010。所述充电模块包括两个充电极片804,所述两个充电极片804设于所述壳体801的底部,用于与所述回收站700连接后为所述清扫机器人800充电。
[0049]
请一并参阅图4和图5,所述回收站700包括基座10、集尘装置20、抬升装置30以及供电模块40。所述集尘装置20设于所述基座10内,所述抬升装置30连接于所述基座10,所述供电模块40设于所述抬升装置20。所述集尘装置20用于回收所述清扫机器人800收集的尘屑,所述抬升装置30用于收容所述清扫机器人800,所述供电模块40用于为所述清扫机器人800充电。
[0050]
所述基座10包括基体11和盖体12,所述盖体12安装于所述基体11的顶部。所述基体11的侧壁上设有收容槽110,所述收容槽110位于所述基体 11的底部,所述收容槽110的形状与所述抬升装置30的形状相适应,所述收容槽110用于收容所述抬升装置30和所述清扫机器人800。所述基体11还设有集尘仓112和储存槽114,所述集尘仓112和所述储存槽114用于收容所述集尘装置20。所述集尘仓112设于所述基体11的顶端,所述盖体12设于所述集尘仓112的仓口。所述储存槽114设于所述集尘仓112背离所述盖体12 的一端,所述储存槽114朝向所述盖体12的一端与所述集尘仓112连通。所述基体11的侧边还设有出风口116,所述出风口116将所述集尘仓112与外部连通。所述基体11的内部还设有吸尘管道118,所述吸尘管道118连通于所述收容槽110和所述集尘仓112,所述吸尘管道118朝向所述收容槽110的一端设有第一吸尘端口,所述吸尘管道118朝向所述集尘仓112的一端设有第二吸尘端口。所述第一吸尘端口用于与所述清扫机器人800的所述出尘口 8010连接,所述第二吸尘端口用于与所述集尘装置20连接,从而将所述清扫机器人800的所述集尘盒内的尘屑回收至所述集尘装置20内。所述第二吸尘端口的两侧分别设有卡槽119,两个所述卡槽119用于与所述集尘装置20定位。
[0051]
所述盖体12的一端可转动地连接于所述基体11,所述盖体12可相对于所述基体11
转动,从而打开或者封闭所述集尘仓112的所述仓口。所述盖体 12的另一端设有翻盖开关13,所述翻盖开关13用于使得所述盖体12和所述基体11之间卡合或分离。
[0052]
请一并参阅图6至图8,所述集尘装置20包括风机21和集尘袋22,所述风机21用于抽取所述清扫机器人800的所述集尘盒内的尘屑,所述集尘袋 22用于储存所述风机21抽取的尘屑。
[0053]
所述风机21安装于所述集尘仓112内,所述风机21的两端分别连通所述集尘仓112和所述出风口116,所述风机21开启工作时可产生吸力抽取所述集尘仓112内的空气并通过所述出风口116排出。
[0054]
所述集尘袋22包括袋体220、袋口支架222以及拉环224,所述袋口支架222连接所述袋体220,所述拉环224连接所述袋口支架222。所述袋口支架222呈矩形环状,所述袋口支架222设于所述袋体220的袋口,用于支撑所述袋体220。所述袋口支架222包括第一侧边2221、第二侧边2222、第三侧边2223以及第四侧边2224,所述第一侧边2221和所述第二侧边2222相对设置,所述第三侧边2223和所述第四侧边2224相对设置。所述拉环224呈半圆环状,所述拉环224的两端分别连接所述袋口支架222的所述第一侧边 2221,便于提携所述集尘袋22。其中,所述袋体220采用纺布材料制成,所述袋口支架222采用柔性塑胶材料制成。
[0055]
所述集尘袋22的数量为至少一个,至少一个所述集尘袋22依次连接。每两个相连接的所述集尘袋22中,其中一个所述集尘袋22的拉环224的中部与另一个所述集尘袋22的所述袋口支架222的所述第二侧边2222连接,其中一个所述集尘袋22的拉环224与另一个所述集尘袋22的所述袋口支架 222的连接处设有点断式撕口,可以便于将两个相连接的所述集尘袋22撕离。
[0056]
所述集尘袋22未使用时,每个所述集尘袋22的所述袋体220均为折叠状态(图8中a状态),至少一个所述集尘袋22卷成团状放置于所述基座10 的所述储存槽114内。所述集尘袋22使用时,最外端的一个所述集尘袋22 的袋口对准所述吸尘管道118的所述第二吸尘端口,所述袋体220呈打开状态(图8中b状态),所述袋口支架222的所述第三侧边2223以和所述第四侧边2224分别卡设于两个所述卡槽119内,以使得最外端的一个所述集尘袋 22能固定于所述第二吸尘端口,其所述拉环224朝向所述集尘仓112的仓口,其余所述集尘袋22收容于所述储存槽114。其中,所述袋体22可以由使用者手动打开,也可以在所述风机21的吸力作用下被打开。当最外端的一个所述集尘袋22需要更换时,通过其所述拉环224将其提起,同时拉动其下一个所述集尘袋22至所述第二吸尘端口处,其下一个所述集尘袋22的所述袋口支架222卡设于所述卡槽119内,再将最外端的一个所述集尘袋22与其下一个所述集尘袋22撕开即可完成更换。
[0057]
请一并参阅图4、图5、图9以及图10,所述抬升装置30包括抬升座31、抬升支架32、电机33以及感应器34。所述抬升支架32可转动地连接于所述抬升座31与所述基座10之间,所述电机33与所述抬升支架32连接,所述感应器34设于所述抬升座31。
[0058]
所述抬升座31包括底板310和两个侧板312,两个所述侧板312设于所述底板310的两侧。所述底板310和两个所述侧板312围合形成容纳槽,用于收容所述清扫机器人800。所述抬升座31的一端连接于所述基座10的底部,所述抬升座31可绕一水平轴线相对于所述基座10转动,从而使得所述抬升座31在折叠状态和展开状态之间切换。当所述抬升座31折叠时,所述抬升座31不连接所述基座10的一端朝向所述基座10的方向转动,直至所述抬升座
31收容于所述收容槽110内,所述抬升座31和所述基座10形成一柱状体;当所述抬升座31展开时,所述抬升座31不连接所述基座10的一端朝背离所述基座10的方向转动,直至所述抬升座31抵接地面。当所述抬升座31为展开状态时,所述底板310倾斜设置,所述底板310背离所述基座10的一端低于另一端,以便于所述清扫机器人800移动至所述容纳槽内。
[0059]
所述抬升支架32包括两个第一支架320和两个第二支架322,两个所述第一支架320分别设于所述抬升座31相对的两侧,两个所述第二支架322分别设于所述抬升座31相对的两侧。每个所述第一支架320或每个所述第二支架322的一端铰接于所述收容槽110的槽壁,每个第一支架320或每个所述第二支架322的另一端铰接于对应的一个所述侧板312,所述第一支架320和所述第二支架322可带动所述抬升座31相对于所述基座10转动。可以理解的是,所述第一支架320和所述第二支架322的数量也可以为一个,比如仅在所述抬升座31的一侧设置所述第一支架320和所述第二支架322,只需所述第一支架320和所述第二支架322能带动所述抬升座31转动即可。
[0060]
所述电机33安装于所述基座10,所述电机33包括第一电机和第二电机。所述第一电机的输出轴与所述第一支架320连接,所述第一电机可驱动所述第一支架320转动,从而带动所述抬升座31转动。所述第二电机的输出轴与所述第二支架322连接,所述第二电机可驱动所述第二支架322转动,从而带动所述抬升座31转动。可以理解的是,所述第一电机的数量可以根据实际需求设置,可以其中一个所述第一支架320连接一个所述第一电机,也可以每个所述第一支架320连接一个对应的所述第一电机。可以理解的是,所述第二电机的数量可以根据实际需求设置,可以其中一个所述第二支架322连接一个所述第二电机,也可以每个第二支架322连接一个对应的所述第二电机。可以理解的是,在一些其他实施例中,所述第一电机和所述第二电机中的其中一个可以被省略。
[0061]
所述感应器34设于所述底板310,所述感应器34与所述电机33之间电连接。所述感应器34采用重力感应器,当所述清扫机器人800完成地面清扫后回到所述抬升座31的所述容纳槽内,由于所述清扫机器人800的机身重量触发所述感应器34的开关,进而使所述电机33通电并驱动所述抬升支架32 转动,带动所述抬升座31转动至折叠状态,使所述抬升座31和所述清扫机器人800均被收容于所述收容槽110内。可以理解的是,在一些其他实施例中,所述感应器34也可以设置为红外感应器、压力感应器等。
[0062]
所述供电模块40包括两个供电极片41,两个所述供电极片41设于所述底板310上。当所述清扫机器人800完成地面清扫后回到所述容纳槽内时,所述清扫机器人800与两个所述充电极片804分别与两个所述供电极片41接触,每个所述充电极片804与一个所述供电极片41相对应,以使得所述供电模块40为所述清扫机器人800供电。
[0063]
以下结合各附图对所述清洁装置900的工作原理进行简要说明:
[0064]
当所述清扫机器人800在进行地面清洁工作时,所述回收站700的所述抬升座31为展开状态;
[0065]
当所述清扫机器人800完成地面清洁工作,所述清扫机器人800回到所述抬升座31的所述容纳槽内,所述感应器34感应到所述清扫机器人800后触发开关使所述电机33通电,所述电机33驱动所述抬升支架32转动,并带动所述抬升座31转动至折叠状态,所述抬升座31与所述清扫机器人800一同收容于所述收容槽110内;
[0066]
当所述清扫机器人800收容于所述收容槽110内时,所述清扫机器人800 的所述出
尘口8010与所述吸尘管道118的所述第一吸尘端口连接,开启所述风机21,在风机21的吸力作用下,所述出尘口8010的所述软胶塞被吸开,所述集尘盒内的尘屑通过所述吸尘管道118被吸取至所述集尘袋22内,完成所述清扫机器人800的尘屑回收工作后风机关闭。
[0067]
相较于现有技术,本实用新型实施例中,所述基座10的侧壁上所述收容槽110,所述抬升装置30和所述清扫机器人800可以收容于所述收容槽110 内,使得所述清扫机器人800在不工作时可以节省储存空间,并且,所述清扫机器人800收容于所述收容槽110时,所述集尘装置20可以自动回收所述清扫机器人800收集的尘屑,使用更加方便。
[0068]
最后应说明的是:以上实施例仅用以说明本实用新型的技术方案,而非对其限制;在本实用新型的思路下,以上实施例或者不同实施例中的技术特征之间也可以进行组合,步骤可以以任意顺序实现,并存在如上所述的本实用新型的不同方面的许多其它变化,为了简明,它们没有在细节中提供;尽管参照前述实施例对本实用新型进行了详细的说明,本领域的普通技术人员应当理解:其依然可以对前述各实施例所记载的技术方案进行修改,或者对其中部分技术特征进行等同替换;而这些修改或者替换,并不使相应技术方案的本质脱离本实用新型各实施例技术方案的范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1