一种用于地面清洁机器人的基站的制作方法
1.本实用新型涉及家用清洁电器领域,尤其涉及一种用于地面清洁机器人的基站。
背景技术:
2.目前市场上的拖地设备在完成拖地后需要用户手工清洗拖布,尤其是遇到脏污程度较高的地面,如不及时清洗拖布则可能导致地面难以清理干净,而手工清理时需要用手去触摸脏污的拖布更是一件恼人的事情,况且需要来回手工更换、清洁拖布,还降低了清洁效率。
3.对此,目前市面上出现了一种供清洁机器人在基站的清洗槽上清洁自己的拖擦件的方案,但是该方案清洁设备长期清理拖擦件之后,会在清洗槽上沉积一些垃圾,由于基站本体过于笨重不利于搬运和清洗,且基站内部结构复杂清洁不方便,所以会加大清洁难度,降低用户体验。
技术实现要素:
4.本实用新型旨在至少部分解决上述技术问题,提供一种用于地面清洁机器人的基站。
5.本实用新型采用的技术方案如下:
6.一种用于地面清洁机器人的基站,包括座体和可拆卸安装的储液箱,所述座体上设有用以安置储液箱的安装腔,所述座体的侧部设有供所述地面清洁机器人进入的开口,所述开口内凹形成有清洗腔,所述清洗腔的底部设有清洗槽,所述安装腔位于清洗腔的上方且所述安装腔与清洗腔之间设有隔板,所述隔板上设有可视的透明部以通过安装腔观察清洗腔。
7.进一步的,所述透明部在清洗腔底部的投影至少部分与清洗槽重叠。
8.进一步的,所述隔板上设有连通安装腔与清洗腔的通孔,所述通孔位于清洗槽的正上方。
9.进一步的,所述隔板上设有不透光的遮挡部,所述遮挡部设于透明部的外侧,所述通孔位于遮挡部。
10.进一步的,所述基站还包括气泵,所述储液箱包括污水箱,所述污水箱上设有进污口和排气口,所述气泵经排气口抽吸污水箱内气体并形成负压,以使清洗槽内污水由进污口进入污水箱。
11.进一步的,所述进污口的截面积大于排气口的截面积。
12.进一步的,所述进污口高于所述排气口。
13.进一步的,所述基站还包括水泵,所述储液箱还包括净水箱,所述净水箱与水泵连通以通过水泵向清洗槽供水。
14.进一步的,所述安装腔的底部设有用以区隔净水箱和污水箱的挡筋。
15.进一步的,所述清洗槽内设有静置的清洗构件,所述地面清洁机器人上设有带拖
布的转盘,所述转盘驱使拖布刮蹭清洗构件。
16.采用本技术方案的有益效果包括:通过在安装腔与清洗腔之间的隔板上设置可视的透明部,在将储液箱从安装腔中拆卸后,用户无需弯腰就能够直接通过安装腔观测清洗腔内的状况,并根据清洗腔内的状况对清洗腔进行清洁等操作。
附图说明
17.作为本技术技术方案一部分的说明书附图用于对本实用新型进一步的理解,本实用新型的示意性实施例及其说明用于解释本实用新型,并不构成对本实用新型的不当限定。
18.图1是本实用新型中的基站外形结构示意图;
19.图2是图1中f
‑
f方向的基站剖面结构示意图;
20.图3是基站未安装储液箱时的一种状态结构示意图;
21.图4是基站的内部布局结构示意图;
22.图5是基站的局部剖面结构示意图;
23.图6是图5中a部的局部放大图。
具体实施方式
24.下面将结合本技术实施例中的附图,对本技术实施例中的技术方案进行清楚、完整的说明。
25.需要说明的是,所描述的实施例仅是本技术一部分实施例,而不是全部的实施例,以下对至少一个示例性实施例的描述实际上仅仅是说明性的,而不应当作为本技术及其应用的限制。
26.可以理解的,本实施例中的地面清洁机器人(图中未示出)是自主移动式的,其可以在脱离人力的情况下自主移动并进行清洁。具体的,在本实施例中,所述地面清洁机器人的底部设有转动或者前后往复移动以对地面进行清洁的拖地组件。所述基站上还设有充电装置,所述地面清洁机器人停靠于基站上时充电装置对地面清洁机器人进行充电。
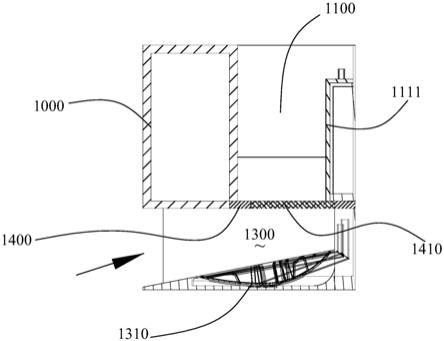
27.结合图1至6所示,在本实施例中的用于所述地面清洁机器人的基站,包括座体1000,所述座体1000上设有用以安置储液箱的安装腔1100,所述储液箱2000可拆卸安装在座体1000的安装腔1100内,所述座体1000的侧部设有供所述地面清洁机器人进入的开口1200,所述开口1200内凹形成有清洗腔1300,所述清洗腔的底部设有清洗槽1310,所述安装腔1100位于清洗腔1300的上方且所述安装腔1100与清洗腔1300之间设有隔板1400,所述隔板1400上设有可视的透明部1410以通过安装腔1100观察清洗腔1300。
28.由于座体的侧部内凹形成清洗腔,所述清洗腔位于座体的内侧,除非用户弯腰低头从所述地面清洁机器人的入口方向观察,否则难以观测到清洗腔内的具体情况,例如清洗腔内的清洁程度等状况。在本实施例中,通过在安装腔与清洗腔之间的隔板上设置可视的透明部,在将储液箱从安装腔中拆卸后,用户无需弯腰就能够直接通过安装腔观测清洗腔内的状况,并根据清洗腔内的状况对清洗腔进行清洁等操作。
29.较佳的,所述储液箱为透明材质制造。如此,使得无需从安装腔中拆卸储液箱也能够观察到清洗腔。
30.具体的,所述透明部1410在清洗腔底部的投影至少部分与清洗槽1310重叠。优选的,所述透明部1410在清洗腔底部的投影完全落入清洗槽1310的范围。如此,用户能够通过所述透明部观察到清洗槽,当清洗槽存在脏污时及时的对清洗槽进行清理,防止清洗槽内长时间残留脏污而导致发臭等卫生状况。
31.进一步的,所述隔板1400上设有连通安装腔1100与清洗腔1300的通孔(图中未示出),所述通孔位于清洗槽1310的正上方。
32.所述储液箱在拆卸与安装过程中,可能会导致部分液体进入安装腔,通过在清洗槽的正上方隔板上设置通孔,使得安装腔内的液体能够从所述通孔直接进入清洗槽,
33.进一步的,所述隔板1400上设有不透光的遮挡部,所述遮挡部设于透明部的外侧,所述通孔位于遮挡部。
34.如此,使得安装腔的积液每次都从不透光的遮挡部处的通孔流入清洗槽,减少积液的水渍在透明部留下痕迹而影响从安装腔向清洗槽的观察效果。
35.进一步的,所述基站还包括气泵1500,所述储液箱2000包括污水箱2100,所述污水箱2100上设有进污口2110和排气口2120,所述气泵1500经排气口2120抽吸污水箱2100内气体并形成负压,以使清洗槽1310内污水由进污口2110进入污水箱2100。
36.气泵抽气时将污水箱内的空气抽出并在污水箱内处于一个微小的负压状态,污水被泵入后暂时存储,在负压状态下能够减缓污水在污水箱内细菌滋生的速度,防止污水快速发臭而导致用户需要频繁倾倒污水的问题。而且,抽气泵水过程中气泵不会直接与污水接触,保证了气泵的寿命和工作可靠性。
37.进一步的,所述进污水口2110的截面积大于排气口2120的截面积。将进污口的截面积设置为大于排气口的截面积,能够保证抽气时快速的将清洗槽中的污水抽入污水箱,提升泵水的效率。
38.进一步的,所述进污口2110高于所述排气口2120。
39.在污水泵入污水箱过程中,污水不可避免的混杂有空气,由于水的密度大,空气的密度小,通过将进污口设置为高于排气口,使得混在有空气的污水进入污水箱时能够快速的实现气水分离,促进泵水与排气的效果。
40.进一步的,所述储液箱2000包括净水箱2200,所述基站还包括水泵1600,所述净水箱2200与水泵1600连通以通过水泵1600向清洗槽1310供水。具体的,所述水泵的两端分别通过管路与净水箱和清洗槽连通。较佳的,所述净水箱2200和污水箱2100并排设置。
41.进一步的,所述安装腔1100的底部设有用以区隔净水箱2200和污水箱2100的挡筋1130,所述挡筋1130将所述安装腔分隔为第一腔1110和第二腔1120,所述第一腔1110与污水箱2100相对应,所述第二腔1120与净水箱2200相对应。
42.如此,将安装腔隔成为相对独立的两个区域用以分别安装净水箱和污水箱,使得净水箱和污水箱的安装相互独立,方便用户单独拆装净水箱或者污水箱。
43.进一步的,污水箱2100包括箱体2101和盖体2102,所述箱体2101的上部设有开口,所述盖体2102可选择性者扣合密封或打开所述开口。具体的,所述盖体上设有密封圈2103,盖体扣合在箱体上时密封圈抵压在箱体上以形成密封。
44.进一步的,所述清洗槽1310内设有静置的清洗构件,所述地面清洁机器人上设有带拖布的转盘,所述转盘驱使拖布刮蹭清洗构件。
45.通过在清洗槽内设置静置的清洗构件,并利用地面清洁机器人本身的运动拖布刮蹭清洗构件进行清洗,使得清洗结构大大简化,清洗槽更加容易清理,而且保证了工作的可靠性。
46.进一步的,所述污水箱2100的底壁和/或侧壁设有内凸形成的支撑台2110,所述第一腔1110内设有与所述支撑台2110相对应的凸起部1111,所述支撑台2110上设有与所述进污口2110和排气口2120分别对应的空心柱2120。具体的,所述空心柱2120包括第一空心柱2121和第二空心柱2122,所述进污口2110对应第一空心柱2121,所述排气口2120对应第二空心柱,所述基站上设有与所述第一空心柱2121和第二空心柱2122分别连通的第一接口1111a和第二接口1111b,所述第一接口通过管路与清洗槽1310连通,所述第二接口通过管路与气泵连通。优选的,进污口设于第一空心柱1241的端部,所述排气口设于第二空心柱的顶端。
47.通过将进污口和排气口设置在污水箱的底壁和/或侧壁内凸形成的支撑台上,抬升了进污口和排气口的高度,能够防止污水箱内的污水从进污口回流或者进入排气口而损毁气泵。此外,还将进污口和排气口设置在第一空心柱和第二空心柱上并将其设于端部,能够进一步抬升进污口和排气口的高度,提升防止污水箱内的污水从进污口回流或者进入排气口的效果。
48.进一步的,本实施例中的污水箱2100内设有遮挡筋2130,所述遮挡筋2130区隔所述进污口2110与排气口2120。
49.通过在进污口和排气口之间设置遮挡筋,可以防止气泵工作时将从进污口出来的污水被直接吸入排气口。
50.进一步的,基站上还设有水位检测装置3000,所述水位检测装置3000限定有污水箱2100的水位界限,所述水位检测装置3000包括磁性浮子3100和磁敏感应器3200,所述磁性浮子3100设于污水箱内,所述水位界限低于所述排气口。具体的,所述磁性浮子3100里面设有磁体3110,所述磁体3110与磁敏感应器3200在预设距离范围内时触发磁感应器3200,所述磁体3110与磁敏感应器3200的距离超出预设距离范围时磁感应器3200未触发。
51.由于设置了水位检测装置,能够实现对污水箱内的污水水量进行控制,在污水水位达到预设的水位界限时进行提示报警控制,以提醒用户进行相应的处理,防止污水水位超过其水位界限而从排气口从溢出。
52.进一步的,所述磁性浮子3100上还设有封闭部3120,所述磁性浮子3100升至水位界限时封闭部3120关闭所述排气口2120。优选的,所述封闭部3120还设有用以密封排气口的硅胶垫3121。
53.通过在磁性浮子上设置用以封闭排气口的封闭部,使得当污水水位达到水位界限时磁性浮子上浮并关闭排气口,从而防止污水进入排气管路,结构简单、可靠。
54.较佳的,在本实施例中的磁性浮子3100上设有与污水箱铰链连接的连杆3130,所述连杆3130的一端与磁性浮子3100连接,所述封闭部3120设于所述连杆3130的另一端,磁性浮子3100升至水位界限时连杆3130的另一端关闭所述排气口2120。
55.在本实用新型中,术语“第一”、“第二”仅用于描述的目的,而不能理解为指示或暗示相对重要性;术语“多个”则指两个或两个以上,除非另有明确的限定。术语“安装”、“相连”、“连接”、“固定”等术语均应做广义理解,例如,“连接”可以是固定连接,也可以是可拆
卸连接,或一体地连接;“相连”可以是直接相连,也可以通过中间媒介间接相连。术语“上”、“下”等指示的方位或位置关系为基于附图所示的方位或位置关系,仅是为了便于描述本实用新型和简化描述,而不是指示或暗示所指的装置或单元必须具有特定的方向、以特定的方位构造和操作。对于本领域的普通技术人员而言,可以根据具体情况理解上述术语在本实用新型中的具体含义。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1