厨房机器人及其加料单元的制作方法
1.本技术涉及家庭物联网技术领域,特别涉及厨房机器人及其加料单元。
背景技术:
2.自古以来,人类尤其是中国人对饮食有着强烈的深层次的追求,做出一道色、香、味俱佳的美食是人们一直的目标。但是目前的美食制作往往依赖于个人的经验来控制,例如对火候的把握,主料和辅料的控制,烹饪时间的把控等因素,很难形成标准化的东西,因此不利于大规模的社会化推广。
3.而目前的厨房电器所具备的功能比较单一,只能提供例如炒、煮、炖等基本功能,并不能对整个美食制作过程提供很好地支持,整个美食制作过程仍然需要大量的人为参与。随着社会节奏的日益加快以及技术发展的进步,人们迫切需要一款高度智能的厨房设备,能够把人的精力从制作美食这个过程中解放出来的同时,仍然能够享受到精美的美食。
4.同时,也要兼顾家庭的实际情况,厨房设备要能够满足厨房使用的需求。
技术实现要素:
5.有鉴于此,本技术实施例提供了一种厨房机器人及其加料单元,以解决现有技术中存在的技术缺陷。
6.本技术实施例提供了一种用于厨房机器人的加料单元,包括:加料盒,包括若干个调料腔,用于存放调料;驱动机构,用于驱动所述加料盒围绕一轴线转动;其中,所述加料盒还具有独立于所述调料腔的凹陷部,所述驱动机构收纳于所述凹陷部,并且所述驱动机构与所述调料腔位于同一水平面。
7.可选地,所述调料腔环形排列在所述驱动机构的外侧周围。
8.可选地,所述驱动机构包括步进马达,所述步进马达始终沿一个方向转动。
9.可选地,所述凹陷部位于所述加料盒的中央,所述轴线穿过所述凹陷部。
10.可选地,所述凹陷部底部设有内齿,所述内齿啮合连接所述驱动机构带动所述加料盒转动。
11.本技术提供的加料单元结构更加紧凑,可以有效减小体积,更适合家庭使用。
12.其次,本技术实施例还提供了一种厨房机器人,包括:烹饪单元,包括锅以及锅盖;加料单元,用于向所述锅内加入配料;所述加料单元包括:加料盒,包括若干个调料腔用于存放调料;驱动机构,用于驱动所述加料盒围绕一轴线转动;其中,所述加料盒还具有独立于所述调料腔的凹陷部,所述驱动机构容纳于所述凹陷部,并且所述驱动机构与所述调料腔位于同一水平面。
13.可选地,所述厨房机器人还包括控制所述锅盖打开和关闭的旋转臂,所述旋转臂部分地位于所述锅盖和所述加料盒之间。
14.可选地,所述旋转臂具有突起部,所述加料盒的凹陷部轴向套接所述突起部。
15.可选地,所述驱动机构容纳在所述突起部内。
16.可选地,所述驱动机构的旋转轴线与所述锅盖的中心线重合设置。
17.另外,本技术提供的厨房机器人结构紧凑,满足家用使用的需求。
附图说明
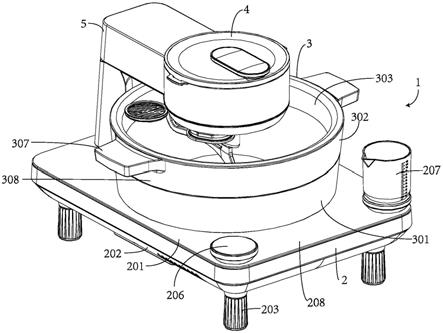
18.图1是本技术实施例的厨房机器人的整体示意图;
19.图2是本技术实施例的厨房机器人的剖视图;
20.图3是本技术实施例的厨房机器人的结构图一;
21.图4是本技术实施例的厨房机器人的结构图二;
22.图5是本技术实施例的锅盖的示意图;
23.图6是本技术实施例的第一马达的结构示意图;
24.图7是本技术实施例的动力面和从动面的剖视图一;
25.图8是本技术实施例的动力面和从动面的剖视图二;
26.图9是本技术实施例的加料单元的装配示意图;
27.图10是本技术实施例的加料单元的爆炸示意图;
28.图11是本技术实施例的加料单元的上盖的结构示意图;
29.图12是本技术实施例的加料单元的本体的俯视图;
30.图13是本技术实施例的加料单元的本体的剖视图;
31.图14是本技术实施例的加料单元的结构示意图;
32.图15是本技术实施例的锅铲组件的剖视图;
33.图16是本技术实施例的锅铲组件的结构示意图一;
34.图17是本技术实施例的锅铲组件的结构示意图二;
35.图18是本技术实施例的锅铲组件的搅拌部的俯视图;
36.图19是本技术实施例的锅铲组件的结构示意图三;
37.图20是本技术实施例的锅铲组件的结构示意图四;
38.图21是本技术实施例的锅铲组件的结构示意图五;
39.图22是本技术实施例的锅铲组件控制方法的流程图一;
40.图23是本技术实施例的锅铲组件控制方法的流程图二;
41.图24是本技术实施例的锅铲组件控制方法的流程图三;
42.图25是本技术实施例的锅铲组件的结构示意图六。
43.1—厨房机器人;
ꢀꢀꢀꢀꢀꢀꢀꢀꢀ
2—基座;
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
3—烹饪单元;
44.4—加料单元;
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
5—支臂单元;
ꢀꢀꢀꢀꢀꢀꢀꢀꢀ
201—台面;
45.202—容纳腔;
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
203—支撑脚;
ꢀꢀꢀꢀꢀꢀꢀꢀꢀ
204—散热结构;
46.205—接口;
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
206—控制开关;
ꢀꢀꢀꢀꢀꢀꢀ
207—计量单元;
47.208—显示面板;
ꢀꢀꢀꢀꢀꢀꢀꢀꢀ
301—底座;
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
302—锅;
48.303—锅盖;
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
304—加热组件;
ꢀꢀꢀꢀꢀꢀꢀ
305—测温组件;
49.306—锅胆;
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
307—手柄;
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
308—裙边结构;
50.309—安全孔;
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
310—安装口;
ꢀꢀꢀꢀꢀꢀꢀꢀꢀ
311—第二卡接部;
51.312—落料口;
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
320—锅铲组件;
ꢀꢀꢀꢀꢀꢀꢀ
321—驱动组件;
52.322—输出轴;
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
323—套筒;
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
324—磁铁;
53.325—电机;
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
326—支架;
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
327—第一轴线;
54.328—底部;
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
329—侧部;
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
330—盖板;
55.331—第一齿轮块;
ꢀꢀꢀꢀꢀꢀꢀ
332—第二齿轮块;
ꢀꢀꢀꢀꢀ
334—止转结构;
56.335—轴套;
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
337—第二轴线;
ꢀꢀꢀꢀꢀꢀꢀ
340—搅拌部;
57.341—搅拌臂;
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
342—斜面;
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
343—旋转轴;
58.344—搅拌部主体;
ꢀꢀꢀꢀꢀꢀꢀ
345—搅拌部边缘;
ꢀꢀꢀꢀꢀ
350—刮菜部;
59.346—倾斜面;
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
351—刮菜臂;
ꢀꢀꢀꢀꢀꢀꢀꢀꢀ
352—刮菜部主体;
60.353—刮菜部边缘;
ꢀꢀꢀꢀꢀꢀꢀ
354—横向刮菜边;
ꢀꢀꢀꢀ
355—竖向刮菜边;
61.356—引导结构;
ꢀꢀꢀꢀꢀꢀꢀꢀꢀ
360—传感器;
ꢀꢀꢀꢀꢀꢀꢀꢀ
361—接收器;
62.401—出料口;
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
402—加料盒;
ꢀꢀꢀꢀꢀꢀꢀꢀ
403—调料腔;
63.404—本体;
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
405—上盖;
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
406—下盖;
64.407—侧壁;
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
408—底部;
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
409—第一开口;
65.410—第二开口;
ꢀꢀꢀꢀꢀꢀꢀꢀꢀ
411—开口;
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
412—加料口;
66.413—盖板;
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
414—滑槽;
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
415—密封腔;
67.416—倒角结构;
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
417—凹陷部;
ꢀꢀꢀꢀꢀꢀꢀꢀꢀ
418—传动孔;
68.419—内齿;
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
420—驱动机构;
ꢀꢀꢀꢀꢀꢀꢀ
421—密封件;
69.422—高润滑材料;
ꢀꢀꢀꢀꢀꢀꢀꢀ
423—第一磁性材料;
ꢀꢀꢀ
424—第二磁性材料;
70.425—第二马达;
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
426—短边;
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
427—长边;
71.501—支撑臂;
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
502—旋转臂;
ꢀꢀꢀꢀꢀꢀꢀꢀꢀ
503—第一马达;
72.504—输出端;
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
505—动力面;
ꢀꢀꢀꢀꢀꢀꢀꢀꢀ
506—从动面;
73.507—直线边;
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
508—弧形边;
ꢀꢀꢀꢀꢀꢀꢀꢀꢀ
509—腰型连接件;
74.510—第一卡接部;
ꢀꢀꢀꢀꢀꢀꢀꢀ
511—滑槽;
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
512—第一从动面;
75.513—第二从动面;
ꢀꢀꢀꢀꢀꢀꢀꢀ
514—第一间隙;
ꢀꢀꢀꢀꢀꢀꢀ
515—第二间隙;
76.516—弧形轮廓;
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
517—触发开关;
ꢀꢀꢀꢀꢀꢀꢀ
518—凸耳;
77.519—支撑盘;
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
520—凸起;
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
521—磁性材料;
78.522—外齿;
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
523—传动机构。
具体实施方式
79.在下面的描述中阐述了很多具体细节以便于充分理解本技术。但是本技术能够以很多不同于在此描述的其它方式来实施,本领域技术人员可以在不违背本技术内涵的情况下做类似推广,因此本技术不受下面公开的具体实施的限制。
80.在本说明书一个或多个实施例中使用的术语是仅仅出于描述特定实施例的目的,而非旨在限制本说明书一个或多个实施例。在本说明书一个或多个实施例和所附权利要求书中所使用的单数形式的“一种”、“所述”和“该”也旨在包括多数形式,除非上下文清楚地表示其他含义。还应当理解,本说明书一个或多个实施例中使用的术语“和/或”是指并包含一个或多个相关联的列出项目的任何或所有可能组合。
81.应当理解,尽管在本说明书一个或多个实施例中可能采用术语第一、第二等来描述各种信息,但这些信息不应限于这些术语。这些术语仅用来将同一类型的信息彼此区分开。例如,在不脱离本说明书一个或多个实施例范围的情况下,第一也可以被称为第二,类
似地,第二也可以被称为第一。取决于语境,如在此所使用的词语“如果”可以被解释成为“在
……
时”或“当
……
时”或“响应于确定”。
82.如图1所示的实施例提供了一种厨房机器人1,其能够自动烹饪美食,能够把人的精力从繁重的烹饪劳动过程中解放出来,同时享用健康的美食。厨房机器人1主要包括基座2、位于基座2上的烹饪单元3、位于烹饪单元3上方的加料单元4、以及用于位于烹饪单元4侧方的支臂单元5。
83.其中,基座2具一呈水平的台面201,用于支撑烹饪单元3。该台面201大致呈为方形,当然在其他实施例中,台面201也可以是其他形状,例如圆形、三角形等形状。台面201的材料由防爆玻璃构成,起到安全防护和便于清理打扫的作用。
84.如图1、图2和图3所示在台面201的下方,基座2还包括容纳腔202以及支撑脚203。容纳腔202主要用于容纳电子电路元器件以及连接元器件的电线。在本实施例中,由于工作时电子电路元器件会产生大量的热量,在容纳腔202 内还是设置有散热结构204。散热结构204可以是包括风扇、散热孔等本领域内常见的结构。另外容纳腔202上设有连接电源线的接口205。该接口205位于容纳腔202的侧壁上。电源线可以连接到外部的ac电源,用于提供烹饪或者控制电路所需要的能量。当然在其他实施例中,也可以在容纳腔202内设置电池包,利用电池包来提供能量。并且进一步地,电池包可以是可拆卸的,便于更换和维修。
85.台面201的支撑脚203用于支撑基座2。支撑脚203具有一定的高度使得基座2水平放置在桌面上时,容纳腔202底部与桌面具有一定的空间间隔,可以更方便的搬运以及更良好的散热效果。在本实施例中,支撑脚203的高度可以调节,从而使得基座2的高度在一定范围内根据实际的使用场景而调节。另外,在本实施例中,支撑脚203的数量为4个,支撑脚203分别分布在基座的4周,起到均匀支撑的作用。当不需要使用时,支撑脚203可以从基座2上拆卸下来,基座2也可以竖立起来从而便于收纳。
86.在本实施例中,基座2的容纳腔202内的电子电路元器件可以包含主控电路板。在一实施例中,电子电路元器件还可以包括各种传感器,例如温度传感器,电流传感器,磁性传感器等。主控电路板可以接受外部用户的指令或者各类传感器发出的传感信号从而发出相应的控制信号,达到控制厨房机器人1自动工作的目的。
87.如图1所示,基座2上还设有控制开关206、计量单元207以及显示面板 208。控制开关206用于给厨房机器人1输入控制指令。为了实现更好的用户操作体验,控制开关206可以进行纵向的按压操作,还可以进行周向的旋转操作。当然本实施例中并不限于这些操作方式,还可以具有常见的推杆滑动式、震动反馈式、触控式等多种交互方式。而计量单元207用于给一些主料或者辅料进行计量称重,便于菜品的标准化制作。在本实施例中,计量单元207具有量杯,量杯内可放置主料或者辅料。而在基座2对应放置量杯的地方设有称量模块。当量杯放置在基座的指定位置时,称量模块即可称量出重量被反馈给主控电路板。而显示面板208用于显示厨房机器人的信息。在本实施例中,显示面板208 为长条形,可以展示更多的信息。另外,为了便于更好地交互,控制开关206、计量单元207以及显示面板208位于台面的侧边,并且位于更靠近用户的一侧。显示面板208位于控制开关206和计量单元207的中间。控制开关206和计量单元207位于面板2的顶角。
88.烹饪单元3安装在基座2的台面201上。烹饪单元主3要包括底座301,锅 302以及锅盖303。底座301用于支撑锅302,使锅302能够稳定地放置在底座 301上。底座301具有凹陷
以容纳锅302的一部分,同时该凹陷具有一匹配锅表面的支撑面。在本实施例中,该支撑面由连续的光滑曲面构成一定的弧度。
89.另外,底座301还包括加热组件304。当锅302放置于底座301上时,加热组件304可以对锅302进行加热。在本实施例中,加热组件304为电磁线盘,电磁线盘上绕装有电磁线圈,电磁线圈工作时产生磁辐射给锅302加热。电磁线盘大致为环形。电磁线盘固定在底座301的背面。底座301的背面设有网格状的定位肋,电磁线盘通过定位肋固定在底座背面。在其他实施例中,加热组件304还可以是其他形式的本领域技术人员所知悉的加热方式,例如加热组件还可以是发热丝组件,利用发热丝通电后产生的热能直接给锅加热。在本实施例中,主控电路板电性控制通过电磁线盘的电流大小,从而相应控制给锅加热的温度。在其他实施例中,主控电路板还可以通过控制电压等其他参数来控制温度。这样的好处是加热可以量化,用数据来表征加热程度,从而达到精确控制的目的。
90.从图2中看出,在凹陷的底部设有测温组件305。测温组件305通过与锅 302的直接接触,探测锅302的当前温度从而进行反馈。从而可以根据实时测量出的当前锅302的温度,相应控制调节温度。例如,需要对菜品进行爆炒时,可以通过主控电路板或者其他控制方式调节加热组件的发热温度,对锅302进行加温处理。测温组件305实时探测锅的温度,当锅302的温度达到预设的加热温度时,主控电路板或者其他控制方式根据测温组件305的实时反馈可以再次调整加热组件304的加热温度,使锅302的温度维持在当前水平。
91.凹陷的底部还可以设有安全组件,为防止一些意外或者不可控因素的出现。例如当测温组件测量出当前锅的温度已经超过一警戒温度时,安全组件可以反馈发出警戒信号,从而使主控电路板或者其他控制方式及时的切断电路,保证用户的安全性。在本实施例中,安全组件为熔断器。熔断器连接在电路中,当温度高于熔断温度时,熔断器熔断电路从而保证电路使用安全。
92.在本实施例中,底座301固定安装在基座2上。具体地,底座301安装在基座2的台面201上,且凸出于台面201所处的平面。且底座具有环形的侧表面,如此设计为加热组件和基座容内的电子电路元器件的电性连接提供更简便的布局。
93.锅302大致包括锅胆306和用于抓持的手柄307。锅胆306凹陷,且具有光滑曲面。锅胆306的光滑曲面和底座的支撑面相匹配,从而使锅胆306能稳定支撑在底座301上。加热组件304对锅302加热的部分也主要集中在锅胆306,使锅胆306内的菜品得到充分加热,提升加热效率。值得注意的,在本实施例中,锅胆306边缘具有一圈向外凸出的裙边结构308,使得锅胆306外表面和裙边结构308形成台阶,从而方便锅302平稳放置在底座301上。优选地,裙边结构308的尺寸通过合理的设计,使得裙边结构308的侧表面和底座301的侧表面共同构成光滑表面。在本实施例中,裙边结构308的半径较大,底座301 的半径的较小,因此裙边结构308和底座301的侧表面形成倒圆锥的侧表面。当然,在其他的实施例中,裙边结构308和底座301的侧表面还可以共同形成圆柱的侧表面,即裙边结构的半径和底座的半径基本相同。
94.本实施例中,锅302的手柄307也设置在裙边结构308的侧表面上。手柄 307的数量为两个,并且对称的设置在锅302的相对两侧。用户可以很方便的抓住手柄307,从而把锅302从底座301上提起。当然,在其他实施例中,手柄 307的数量也可以为一个,即用户从单侧抓握手柄。另外,手柄307的连接方式也可以具有多种方式。在本实施例中,手柄307是固
定连接到裙边结构308上,这样手柄307相对锅302是不可拆卸的。固定连接的方式也可以是螺钉锁定或者其他常见的方式。当然,手柄307也可以设置成活动式的,尤其是手柄307 是可折叠的或者可旋转的,从而在不使用的时候可以收纳起来以减少体积。
95.锅盖303用于覆盖在锅302的上方,使锅胆306内的菜品与外界基本隔离。锅盖303与锅302的分开设置的,两者之间没有连接结构。在本实施例中,锅盖303可以通过控制指令来自动开闭,从而避免人为操作,提升操作用户体验,另外也可以减少一些潜在的危害。针对如何通过控制指令会在后面进行详细描述。锅盖303具有至少两种状态。如图3所示的一种状态,锅盖303覆盖在锅 302上,并与锅302有接触,即锅盖303处于闭合状态。在如图4所示的另一种状态,锅盖303与锅302没有接触,即锅盖303处于打开状态,此时菜品能够从锅302内取出或者放入锅302内。如图5所示,锅盖303是钢化玻璃制作形成的,既可以保证国内食物的可视性,又能保证安全性,防止锅内食物或者热油等物质的溅出。另外,锅盖303表面还可以设有安全孔309,安全孔309具有泄压功能,来保证锅盖303覆盖到锅302时,锅302内的压力保持安全。在优选的实施例中,安全孔309还可以设有类似的百叶窗的结构。
96.支臂单元5主要用于在锅盖303打开和关闭时提供支撑作用。支臂单元5 包括可相对转动的支撑臂501和旋转臂502。支臂单元5因此可控制锅盖旋转打开和关闭。在本实施例中,支撑臂501是固定设置的。旋转臂502可相对于支撑臂501围绕一轴线转动。其中,该轴线大致沿水平方向,和锅盖303放置在锅302上时的锅盖303的纵向轴线相对垂直。另外,旋转臂502相对支撑臂501 的旋转范围为60度。
97.支撑臂501固定设置在基座2上。具体地,支撑臂501位于台面201的底座301附近,一方面支撑臂501不会影响底座301上的锅302的正常使用,另一方面支撑臂501用于提供一定高度便于控制锅盖303。在本实施例中,支撑臂 501贴合底座设置。具体地,基座2以底座为中心,具有靠近用户的一侧以及远离用户的另一侧。为了减少干扰,支撑臂501即位于远离用户的另一侧。
98.支臂单元5具有用于驱动锅盖运动的动力单元。动力单元主要包括位于支撑臂501内的第一马达503。第一马达503用于驱动旋转臂502相对支撑臂501 转动。第一马达503沿纵向设置。第一马达503的旋转轴线与锅盖303的纵向轴线平行。使得支撑臂501的横向尺寸小于其纵向尺寸。由于动力单元的输出端504与支撑臂501连接,且驱动支撑臂501围绕一水平的轴线转动。因此在输出端504与第一马达503之间还设有传动机构523。传动机构523把第一马达 503的纵向旋转驱动转化为输出端504沿水平方向的轴向转动。同时考虑输出端 504带动锅盖503等其他结构转动需要较大的扭力,因此传动机构523还可以通过合理的减速比设计提高输出扭矩。传动机构523可以是蜗轮蜗杆组件或者是行星锥齿轮等本领域常见的结构。
99.在本实施例中,动力单元传递动力给旋转臂是通过形配方式进行的。具体地,输出端504具有动力面505,支撑臂502具有从动面506,动力面505与从动面506配接实现动力传动。动力面505和从动面506都是平面,两者相互接触并贴合以实现动力传动,而当两者脱离接触时,动力连接就会断开。
100.如图6和图7所示,动力单元的输出端504具有一腰型构造。换句话说,输出端504具有一水平的旋转轴线,而输出端504在垂直该轴线的截面平面内的投影为腰型。具体地,该腰型构造包括一对直线边507和一对弧形边508。其中,直线边507间隔一定距离平行设置,
而弧形边508相对设置并且位于直线边507之间,弧形边508向外凸出。直线边507的长度大于弧形边508的半径,使得整个腰型构造具有细长的轮廓。并且进一步地,直线边507与弧形边508 相切。当然,在其他实施例中,输出端504还可以具有其他形状的构造,例如可以是三角形或者六边形等其他构造。另外,腰型构造的中心线沿水平设置,中心线与旋转轴线重合设置。腰型构造的中部还具有开口,开口用于连接传动机构,中心线和旋转轴线也同样穿过该开口。其中,动力面505在该截面平面内的投影与该直线边重合。
101.对应地,旋转臂502上具有腰型连接件509以配接输出端的腰型构造。具体地,腰型连接件509位于旋转臂502的一端,特别是靠近支撑臂501的一端。腰型连接件509连接到输出端504的腰型构造的外围,使得腰型连接件509与输出端504的腰型构造能够同步转动。旋转臂502的另一端即远离支撑臂501 的一端具有连接锅盖303的第一卡接部510。该第一卡接部510与锅盖303具有快速拆装的功能。如图5所示,锅盖303的中央具有安装口310,锅盖303的中心轴线贯穿该安装口310。锅盖303的安装口310上设有第二卡接部311。第二卡接部311在围绕该中心轴线的周向上具有凸起。而旋转臂502的第一卡接部 510在周向设有滑槽511。并且进一步地,该滑槽511的端部还具有滑槽入口,滑槽入口的开口方向与滑槽511的延伸方向相互垂直或者成一定的角度。凸起从滑槽入口进入滑槽511后能够沿周向移动实现定位功能。当然在其他实施例中,也可以在第一卡接部上510设有凸起,而在第二卡接部311上设有滑槽。在实际使用过程中,锅盖303靠近旋转臂的502的第一卡接部510,并允许第一卡接部510部分穿过锅盖303中央的开口,使得第二卡接部311上的凸起对准第一卡接部510上的滑槽511。然后沿中心轴线转动锅盖303,或者使锅盖相对第二卡接部311沿第一方向产生转动,从而使得凸起滑入滑槽511中实现卡接,锅盖303即固定在旋转臂502上。当需要锅盖303从旋转臂502上拆卸下来时,反向转动锅盖303,或者使锅盖303相对第二卡接部311沿第二方向产生转动,第二方向与第一方向相反,从而使得凸起推出滑槽511实现脱离,锅盖303即与旋转臂502分开,方便锅盖303的收纳或者清洗。在本实施例中具有3组周向上凸起和滑槽形成配合。并且该3组沿周向均匀分布。在其他实施例中,也可以具有其他数量组数的凸起和滑槽,例如1组,2组或者4组等。
102.如图7所示,旋转臂的腰型连接件具有从动面以配接动力面。在本实施例中,腰型连接件具有至少两个从动面,第一从动面512和第二从动面513。动力面可以选择地和第一从动面512与第二从动面513中的一个进行配接。当进行正常的动力传递即输出端504输出动力带动锅盖303旋转时,动力面505和第一从动面512进行配接。当正常的动力传递终止即输出端504停止输出动力时,动力面505离开配接所述第一从动面512并配接第二从动面513。如图7所示,当动力面505和第一从动面512配接时,动力面505和第二从动面513之间具有第一间隙514。而当动力面505和第二从动面513配接时,动力面505和第一从动面513之间具有第二间隙515。第一从动面512和第二从动面513均为平面。而且两者相互连接,并且是呈一定角度的连接,使得动力面505能够以旋转的姿态从配接一个从动面切换到配接另一个从动面。其中,第一从动面512和第二从动面513之间背向动力面方向的夹角为一钝角,在本技术中优选为170度左右。而第一从动面512和第二从动面513之间朝向动力面方向的夹角为一大于180的角度。动力面505在该截面平面内的投影长度大于第一从动面512在该截面平面内的投影长度。当然,动力面505在该截面平面内的投影长度也大于第二从动面513在该截面平面内的投影长度。这样可以方便动力面在配接从动面的切换。
103.另外,为配合输出端,腰型连接件509也具有弧形轮廓516以和输出端504 的弧形边508相匹配。弧形轮廓516和弧形边508的曲率程度保持一致。而且弧形轮廓516的弧线长度也大于弧形边508的弧线长度,这是为了使动力面505 在从第一从动面切512换到第二从动面513时,弧形边508始终和弧形轮廓516 保持贴合。如图7所示,腰型连接件509的第一从动面512、第二从动面513和弧形轮廓516依次连接。连接第一从动面512的两端分别是第二从动面513和弧形轮廓516,连接第二从动面513的两端分别是弧形轮廓516和第一从动面 512,连接弧形轮廓516的两端分别是第一从动面512和第二从动面513。
104.由于锅盖303相对于锅302具有盖合锅302的关闭位置和打开锅302的打开位置,旋转臂502带动锅盖303在关闭位置和打开位置之间转动切换。为了更好地控制效果,厨房机器人1还具有分别对应关闭位置和打开位置的触发开关517。旋转臂502在转动至对应位置时会出发对应的触发开关517。旋转臂502 上具有凸耳518,凸耳518能够接触并触发触发开关517,从而相应产生触发信号。如图3所示,在本实施例中,触发开关517的数量为2个,该2个触发开关517分别沿上下分布,当凸耳518转动至对应打开位置的触发开关517时,该触发开关517发出触发信号代表锅盖303此时已位于打开位置。当凸耳518 转动至对应关闭位置的触发开关517时,该触发开关517发出触发信号代表锅盖303此时已位于关闭位置。触发开关517和凸耳518均设置在支撑臂501的内部空腔中。在其他实施例中,也可以设置两个凸耳和一个触发开关来配合。支撑臂501的内部空腔中还具有固定筋条,可以用来固定触发开关以及第一马达503的位置。而凸耳518优选的设置旋转臂502的腰型连接件509上,这样可以保证凸耳518和从动面506同步转动。
105.动力单元驱动锅盖303的使用场景是这样的:当用户想要关闭锅盖303或者程序、软件等自动控制关闭锅盖303时,第一马达503启动输出旋转动力,此时由于输出端504的动力面505和旋转臂502的第一从动面512处于配接贴合状态,因此第一马达503带动旋转臂502及其连接锅盖303朝向关闭位置的方向旋转。保持此状态一直到旋转臂502上的凸耳518触发了触发开关517。触发开关517产生信号使厨房机器人1判断锅盖303已关闭到位,因此控制第一马达503关闭停止输出动力。因此输出端504的动力面505也立即停止转动。当时考虑实际过程中存在一些误差的情况,例如是公差或者延时控制的原因,当第一马达503停止转动时,锅盖303并未完全关闭到位。为了提高精度使得锅盖303能够完全关闭到位,旋转臂502上设置了第一从动面512和第二从动面513。当动力面505停止转动后,借助锅盖303本身的重力或者旋转的惯性,或者本领域技术人员能够知晓或者预见到的因素,旋转臂502还能继续运动一小段行程,从而使与动力面505配接的从动面506从第一从动面512切换到了第二从动面513。如此使得旋转臂502及锅盖303在第一马达503停止旋转后,又前进了一段行程,达到完全闭合锅302的目的。
106.另外,由于不同的厨房机器人1的差异性或者同一个厨房机器人1在反复执行多次关闭锅盖303的过程中,不能保证完全一致性。例如,某个厨房机器人1在执行某次关闭锅盖303的动作,马达停机时锅盖303可能已经正好关闭。而在执行另外一次关闭锅盖303的动作,马达停机后锅盖303需要前进一段行程。现在旋转臂502上两个从动面的设计留给一定余量,确保在更多的场合下锅盖能够精准的关闭到位。而且在锅盖303关闭行进最后一段行程时,旋转臂 502和输出轴504是脱开动力连接的,这样也起到保护马达的作用,防止产生可能的扭力过大而破坏马达。
107.本技术的厨房机器人除了能够自动打开和关闭锅盖外,还具有自动添加调料的功能。如图1所示,厨房机器人1具有除了具有烹饪单元3外,还具有加料单元4。加料单元4用于执行向锅302内自动加入调料。如图1、图2和图9 所示,加料单元4整体位于锅盖303的上方。在较佳的实施例中,加料单元4 位于锅盖303的正上方,即加料单元4的中心线与锅盖303的中心线重合。锅盖上设有落料口312,落料口312相对锅盖303的中心偏心设置,这样设计使得落料口312与锅盖303的中心开口不会干涉冲突。落料口312的开口方向朝上设置。加料单元4具有一出料口,出料口的开口方向朝下设置。当加料单元4 位于一合适的位置时,落料口312和出料口的正好匹配对准,加料单元4中的调料就会由于重力的原因,从落料口312和出料口进入到锅内,从而完成加料。
108.在本实施例中,加料单元4包括加料盒402以及驱动加料盒的驱动机构420。加料盒402上设有调料腔403用于存储调料。驱动加料盒402的驱动机构420 和驱动旋转臂502以及锅盖303的动力源是不同的。此处的驱动机构420用来单独驱动加料盒402。驱动机构420主要包括第二马达425和传动机构。第二马达425通过传动机构驱动加料盒402进行旋转运动。并且进一步地,加料盒402 始终围绕一旋转轴线转动。其中,加料盒402的旋转轴线与锅盖303的中心线相平行设置。换句话说,加料盒402的旋转轴线是纵向设置的。在优选的实施例中,加料盒402的旋转轴线和其中心线重合,即加料盒402围绕其中心线转动。因此,可以通过驱动机构420控制加料盒402转动至一个转动位置,在该位置上,落料口312和出料口对准,使得调料离开加料盒而进入锅内。在本实施例中,加料盒402具有多个相互独立设置的调料腔403,这是因为烹饪一个菜品往往需要用到多种调料,而且不希望相互混合引起串味。因此,本实施例中的加料盒402可以具有多个转动位置,每个调料腔403都可以在对应的转动位置使得出料口和落料口312对准。
109.如图9所示,加料盒402安装在旋转臂。具体地,加料盒402安装在旋转臂502的远离支撑臂501的一端。旋转臂502整体的中部具有一定的厚度,而在该端部,旋转臂502具有扁平的支撑盘519,支撑盘519的厚度远小于旋转臂 502整体的厚度。支撑盘519具有两个相对的侧面。加料盒402安装在支撑盘 519上,而锅盖303同样安装在该支撑盘519上。当加料盒402安装在支撑盘 519上后,加料盒402和支撑盘519形成的厚度大体与旋转臂502整体的中部厚度相等。另外,加料盒402位于支撑盘519的其中一侧,而锅盖303位于支撑盘519相对的另外一侧。因此作为旋转臂502一部分的支撑盘519,夹在锅盖 303和加料单元4之间。第一卡接部510即位于该支撑盘519的另外一侧上,从而配合锅盖303的第二卡接部311,使得锅盖303可拆卸的安装在另一侧上。另外加料盒402也同样可拆卸的安装在支撑盘519上。支撑盘519大体为圆盘,第一卡接部510围绕圆盘的中心设置,锅盖303的安装口上第二卡接部311与第一卡接部510配合卡接后,圆盘的中心与锅盖303的中心基本重合。
110.为了更加方便的拆装清洗,加料盒402和支撑盘519之间通过磁性进行相互吸附。平时安装完毕后加料盒402和支撑盘519之间的抵靠通过磁性相吸。而当用户需要两者进行分离时,只需克服磁性吸附力即可把两者分开,十分的方便。如图9所示,支撑盘519上设有凸起520,加料盒402配合安装在该凸起 520上。凸起520关于支撑盘519的中心对称设置,加料盒402安装到凸起520 后,加料盒402的中心也与支撑盘519的中心基本重合。因此锅盖303、支撑盘 519以及锅盖303的中心线基本重合。而在该凸起520上设有磁性材料521,而在加料盒4同样设置有磁性材料。为了吸附均匀,凸起520上的磁性材料521 为环形,且正好穿
过锅盖303的中心线。
111.如图10所示,加料盒402整体形状为具有一定厚度的圆柱形。加料盒402 包括盖体以及位于盖体内的本体404。盖体位于加料盒402的外围,起到包裹保护的作用,其内部中空,形成容纳空间。本体404即位于该容纳空间内。本体 404安装后可被驱动进行旋转运动。而盖体是固定不动的。因此本体404相对盖体可以转动。另外,加料盒402整体与旋转臂502上的支撑盘519之间可快速拆卸的安装,而加料盒402内部的盖体和本体404之间也是可快速拆卸的安装,方便日常维护和清洗。
112.在本实施例中,盖体包括分体式设置的上盖405和下盖406。上盖405和下盖406配合形成容纳空间。安装时,上盖405覆盖本体404的上侧,下盖406 覆盖本体404的下侧。拆卸时,上盖405和下盖406分开,位于容纳空间中的本体404可以很方便的取出。在其他实施例中,盖体也可以具有多种形式,例如盖体可以具有3个零件相互拼接形成,盖体也可以一体形成。下盖406支撑在支撑盘519上。下盖406主要包括环形的侧壁407和圆形的底部408。侧壁 407用于包围本体404的侧面。底部408具有位于中部的第一开口409和偏心设置的第二开口410。其中,第一开口409用于和支撑盘419套接。支撑盘419的凸起420的直径略小于第一开口409的直径,使得第一开口409与凸起420套接配合,也方便整个加料盒402的定位。另外第一开口409还设有沿开口方向延伸的侧壁,侧壁朝向本体方向延伸,即朝向下盖406的内侧。从而使得侧壁和本体404配合定位。第二开口410同样用于和支撑盘419套接。第二开口410 用于和支撑盘419上的开口411配接。第二开口410同样设有沿开口方向延伸的侧壁,第二开口410的侧壁朝向支撑盘419延伸,即朝向下盖的外侧。该支撑盘419上的开口411正好与锅盖303上的落料口312对准安装,从而保证该开口411和落料口312始终贯通。因此,结合第二开口410和开口411的关系,当下盖406安装到支撑盖419上后,下盖406上的第二开口410始终对准锅盖上的落料口312。
113.如图10所示,上盖405主要包括圆形的顶部。上盖405的顶部的面积和下盖406的底部408的面积大小相当。上盖405的顶部设有加料口412。调料可以从该加料口412加入到本体404的调料腔403中。加料口412上还设有用于打开和关闭加料口412的盖板413。当需要进行加料时,可以操作盖板413打开从而露出加料口;而当不需要加料时,可以操作盖板413关闭从而封闭加料口412。在本实施例中,盖板413是沿着上盖405表面滑动操作的。上盖405表面设有滑槽414,盖板413具有导轨可沿着滑槽414移动。当然,在其他实施例中,盖板413也可以是其他形式的操作方式,例如按钮式、触控式等。另外,为了与下盖406实现更好的装配效果,上盖405的侧边还具有与下盖406的侧壁相配合的台阶结构。
114.上盖405和下盖406均可拆卸地固定安装,而位于上盖405和下盖406之间的本体404则是可旋转的安装。本体404大体是圆柱体,通过磁性吸附设置在盖体形成的容纳空间。本体404上具有调料腔403,外面的调料可以经加料口 412加入到调料腔403中暂时储存。并且在后续合适的时间内把调料腔403中的调料再倒入到锅302中。由于烹饪一道菜品需要多种调料,而且每道菜品所需要的调料也各不相同,因此本体404中往往设有多个调料腔403。并且多个调料腔403互相独立,每个调料腔403可以放入一种调料,这样不同调料的存储不会相互串味。或者,每个调料腔403可以放入几种调料,该些调料不会相互干扰。而调料的形式可以是固态或者液态。在本实施例中,考虑到一道菜品通常需要的调料种类以及调料容纳体积的因素,调料腔403的数量为5个。在其他实施例中,调料腔403的数量也可以7、6、4、3
等其他数字。调料腔403为通孔的形式,其两端均为开口,中部贯通。调料腔403沿纵向方向延伸。在本实施例中,本体404还包括密封腔415,密封腔415与调料腔403并列平行设置。密封腔415与调料腔403相似,均沿纵向方向延伸,两者不同的是,密封腔415 的两端均封闭。在本实施例中,密封腔415为1个。当然密封腔的数量也可以是2、3、4等其他数字。调料腔403和密封腔415围绕本体404的中心线排列。在本实施例中,调料腔403和密封腔415的总数量为6个,该6个腔体沿环形均匀分布。因此相邻的两个腔体之间的夹角大约为60度。当然,其夹角根据腔体的总数量而相应变化,大体是30度至120度之间变化。如图12所示,调料腔403的截面大体为扇形,其宽度沿径向向内变窄。截面中的短边426更靠近中心,截面中的长边427更靠近边缘。另外,截面的转角处还设有倒角结构428。密封腔415的纵向上的截面积与调料腔403大小相同。
115.如图13所示,本体404还具有凹陷部417。凹陷部417位于本体404的中央位置,本体404的旋转轴线穿过该凹陷部417。凹陷部417的具体结构为本体上的盲孔。盲孔的开口朝向下盖406。盲孔位于本体404的中央位置,其作用是能够形状匹配支撑盘519的凸起520。当把加料盒402安装支撑盘519时,支撑盘519上的凸起520穿过下盖406中央的第一开口409,然后和本体404的盲孔配合。在盲孔的底部也就是本体404的顶部还有传动孔418,传动孔418用于和第二马达425连接实现动力传动,使第二马达425驱动本体404进行转动。在本实施例中,传动孔418具有内齿419和第二马达425的传动齿轮啮合。
116.如图2所示,驱动本体404转动的驱动机构420容纳在本体404的凹陷部 417内,使得本体404的调料腔403与驱动机构420位于同一水平面。换句话说,调料腔403的高度与驱动机构420的高度基本一致。其中,驱动机构420位于中央,调料腔403沿环形排列在驱动机构420的外侧周围。驱动机构420的中心线与凹陷部417的中心线重合设置,同时也与锅盖303的中心线重合。位于凹陷部417底部的传动孔418与驱动机构420的齿轮啮合,从而使得第二马达 425直接带动本体404旋转。而这种齿轮配合的方式利于本体404和驱动机构 420的快速拆装。在本实施例中,由于支撑盘519的凸起520配合套接本体404 的凹陷部417,因此驱动机构420同样被容纳在凸起520的内部空间内。凸起 520的内部空间略大于驱动机构420的体积,同时又略小于本体404的凹陷部 417的内部空间,因此三者是相互套接的连接关系。同时凸起520也可以作为外罩,起到保护驱动机构420安全的作用。当然为了保证顺利的传动,驱动机构 420的传动齿轮伸出凸起520的端部。在本实施例中,第二电机425为步进电机,步进电机可以精确控制本体404在周期内的旋转角度。而且在本技术中步进电机始终沿一个方向例如是顺时针方向旋转,起到简化控制的目的。
117.本体404受驱动机构420驱动围绕其中心轴线旋转。因此本体404相对于盖体产生相对转动而具有多个转动位置。在其中一个转动位置,本体的调料腔 403和下盖406上的第二开口4正好对准,从而形成打开状态的出料口401。又由于锅盖303上的落料口312和下盖406上的第二开口410是始终相通的,因此调料腔403中的调料会通过出料口401和落料口312,而进入到锅302内,该位置即为落料位置。当然由于本体有多个调料腔403,每个调料腔403都对应了一个落料位置,该调料腔403和下盖406形成打开状态的出料口401,而此时其他调料腔的下端被下盖406封闭。也就是说,每当转动至一个落料位置,都只有一个调料腔403被打开,相应的只有一种调料被加入到锅402中。举例来说,当烹饪一道菜品需要加入3种调料到锅内的场景下,加料盒本体404需要分别转到3个落料位置,使得对应的3个调料腔
403先后被打开,3个调料腔403内的3种调料就被加入到锅302内。因此加料盒本体404旋转一周会使得加料盒 402在多个出料位置之间切换。
118.另外由于出于实际使用本厨房机器人的需求,加料盒本体404还额外设置了密封腔415。当本体404在一个转动位置,本体404的密封腔415正好对准下盖406上的第二开口410,从而形成关闭状态的出料口401,此时所有调料腔403 都被下盖406所封闭,该位置即为密封位置。当然密封位置的数量和密封腔415 的数量也是相等的。在本实施例中,密封腔415具有1个,密封位置也对应只有1个。在本体404围绕轴线旋转一周的周期内,多个落料位置和密封位置会依次出现。
119.而上盖405上的加料口412与本体404的调料腔403的配合和下盖406上的第二开口410与调料腔403的配合类似。上盖405靠近调料腔403上端的开口设置。当本体404转动到某个位置时,本体404的调料腔403和加料口412 对准,此时调料可以从加料口412加入到调料腔403中,该位置即被定义为加料位置。在加料位置,都存在本体404的一个调料腔403与该加料口412对准从而方便加料。若需要加入多种调料,则可以控制转动本体404,每转到一个加料位置,可以往对准加料口412的调料腔403加入一种调料,然后转至下一个加料位置,又会有另一个调料腔403对准加料口,可以加入另一种调料。因此对于调料腔403来说,调料从本体404的上端加入,需要出料时,调料从本体 404的下端落入锅内。
120.还值得注意是,调料腔403还需要考虑其密封性,以防止调料从端部泄露。因此调料腔403的端部设有密封件421,密封件421能够和盖体的内侧表面抵接从而形成密封。具体来说,密封件421的制成材料不同于调料腔,其是由硅胶形成的,因此具有很高的柔性。同时,还考虑到密封件的材料必须具有一定的食品安全性,不能对食物造成污染。当然在其他实施例中,密封件421还可以是由其他具有一定柔性的材料形成。并且在每个调料腔403的上下两端均设有密封件。调料腔403下端的密封件抵接下盖的内侧表面,调料腔403上端的密封件403抵接上盖的内侧表面。密封件421具有中空的环形结构,其与调料腔 403端部的轮廓相匹配。进一步地,在密封件421的环形结构同样设置在密封腔 403的端部,如此使得密封件421的环形结构的个数与调料腔403和密封腔415 的个数相匹配。另外,密封件421的环形结构之间还设有连接件。
121.除了要考虑调料腔403和盖体之间静止时的密封作用,还需要考虑调料腔 403和盖体相对运动时两者的摩擦力尽可能的小。因此盖体的内侧表面由另外一种材料构成,使得该种材料和密封件的材料之间的摩擦系数小于0.8。优选地,摩擦系数小于0.5。因此该种材料是高润滑材料422。在本实施例中,该种材料为聚四氟乙烯,即特氟龙。该种材料喷涂在盖体的内侧表面。在实际使用的场景中,当调料腔和盖体相对静止时,柔性的硅胶抵接在聚四氟乙烯的表面,从而形成比较好的密封效果。当调料腔和盖体相对转动时,柔性的硅胶产生轻微形变,在驱动机构的驱动力作用下,硅胶在聚四氟乙烯的表面滑动,并不会产生较大的摩擦力,从而降低驱动机构需要提供的扭矩需求。在另外一种实施例中,盖体的内侧表面的材料也可以是玻璃,硅胶在玻璃的表面进行滑动。同样不会产生较大的摩擦力。
122.在沿中心线延伸方向上,为了便于快速拆装,上盖405、下盖406和本体 404之间通过磁性进行吸附。在本实施例中,本体设有第一磁性材料423,而上盖和下盖分别设有第二磁性材料424。第一磁性材料423和第二磁性材料424在两者到达一定的距离内会产生磁性吸附。因此,上盖405和本体404之间产生相互吸附,同时下盖406和本体404之间也产生相互
吸附作用。其中,第一磁性材料423是磁铁,第二磁性材料424是铁片或者其他金属材料。当然在其他实施例中,第一磁性材料423也可以是铁片或者其他金属材料,而第二磁性材料424是磁铁。而在另外一个实施例中,本体404可以没有设置磁性材料,而在上盖405设置第一磁性材料423,并且下盖406设置第二磁性材料424。第一磁性材料423和第二磁性材料424之间才生磁性吸附,从而对上盖405和下盖 406之间的本体404进行夹持定位。当然,在另外一种实施例中,上盖405和下盖406不设置铁片等金属材料,而是设置对应的快拆结构,方便上盖405和下盖405之间快速的拆卸和组装。这些快拆结构可以是卡扣和卡槽的配合,也可以是凸起和滑槽的配合。相较于设置金属材料,这样的上盖405和下盖406的重量可以进一步减轻。
123.为了进行更好的烹饪,本技术的厨房机器人1还具有锅铲组件320。锅铲组件320可以设置在锅302内,并在烹饪菜品的时候对菜品执行翻炒等功能。本技术的厨房机器人1可对锅铲组件320进行控制从而自动进行翻炒,节省了用户的时间和精力。因此,本技术的厨房机器人1包括了用于驱动锅铲组件320 转动的驱动组件321。出于安全性以及节省空间的角度考虑,本技术的驱动组件 321设置在锅302的外侧,而锅铲组件320设置在锅302的内侧。如图2所示,驱动组件321设置在锅盖303的上方,而锅铲组件320设置在锅盖303的下方。锅铲组件320通过插拔的方式与驱动组件321可拆卸的连接,这样便于快速的更换和清洗维护。驱动组件321具有一输出轴322,而锅铲组件320具有连接输出轴322的套筒323,输出轴322可以套接在套筒323内形成动力传递。在套筒 323的底部设有磁铁324,而输出轴322上具有磁性材料,因此输出轴322可以快捷的插入到套筒323中并进行定位。另外套筒323和输出轴322的侧表面具有防呆设计,防止套筒323和输出轴322在传递动力时产生相对转动。在本实施例中,输出轴322为正六边形,而套筒323具有匹配正六边形的形状。驱动机构321包括电机325,输出轴322以及连接输出轴322和电机325的皮带326。电机325同样设置在旋转臂502中。在本技术中,由于加料单元4设置在锅盖 303的上方,驱动机构321的电机325因此偏心设置,给加料单元4留下设计空间。而驱动机构321的输出轴322沿着锅盖303的中心线设置,通过皮带319 把电机325和输出轴322连接起来。电机325通过皮带319可以带动输出轴322 围绕输出轴322的中心线旋转。而电机325选优为直流有刷电机,提供稳定可靠的输出,而且损耗较小。进一步地,为了控制输出轴322的转速在理想范围内,驱动机构321还可以包括减速箱。
124.如图15和图16所示,锅铲组件320还包括支架326。套筒323即固定设置在支架326上。因此输出轴322可以驱动支架326围绕输出轴322的中心线旋转,也就是第一轴线327旋转。该而第一轴线327是与锅盖303的中心线重合的。在本技术中,支架326具有水平的底部328和竖直的侧部329。底部328和侧部329形成容纳空间,用来支撑和容纳相互啮合的第一齿轮块331和第二齿轮块332。底部328和侧部329优选地一体成型。另外,支架326还具有盖板 330,盖板330覆盖在底部328的上方。盖板330可以改善容纳空间的密封性,防止位于容纳空间内的第一齿轮块331和第二齿轮块332收到锅302内的水气等其他液体气体等。盖板330的投影截面和底部328的投影截面基本相同。另外,盖板330设计成与底部328可拆卸的,在盖板330的周边设置密封硅胶,既满足了密封的要求,也满足了快速拆卸的要求。
125.第一齿轮块331是固定设置的。第一齿轮块331设有止转结构334。在图 16和图5中,止转结构334为第一齿轮块331上的内齿。而旋转臂502的第一卡接部510上设有配合该
内齿的外齿522。当第一齿轮块331安装到位后,内齿和外齿522相互啮合限位。由于第一卡接部510是固定在旋转臂502的,因此依靠内外齿的配合,第一齿轮块331同样被固定不转动。当然在其他实施例中还可以是其他形式的止转结构,只要能够固定第一齿轮块331即可。另外,在本技术中,第一齿轮块331套接在套筒323外侧,而在第一齿轮块331内侧还设有轴套335。轴套335的是使套筒323和轴套335可以相对转动,即套筒323 受输出轴322驱动而转动时,轴套335并不会产生相应转动,第一齿轮块331 处在相对固定的位置。当然,在其他实施例中,第一齿轮块331还可以安装在支架的其他位置,只要使第一齿轮块331固定即可。
126.第二齿轮块332则活动设置。由于第二齿轮块332与第一齿轮块332始终啮合,因此第二齿轮块332可以围绕第一齿轮块331的周向转动。为了控制合适的转速比,第二齿轮块332的齿数少于第一齿轮块331的齿数。第二齿轮块 332的半径也小于第一齿轮块331的半径。第二齿轮块332的中心线对于输出轴 322的旋转中心偏心设置。
127.锅铲组件320还具有工作头,工作头用于接触并处理菜品。在本技术中,锅铲组件的工作头包括搅拌部340。搅拌部340用于对菜品进行搅拌,甚至还可以进行翻炒。在图18所示的实施例中,搅拌部340具有搅拌臂341,从搅拌臂 341的旋转运动方向看,搅拌臂341的形状为弧形,且内侧的弧形比边缘的弧形弯曲程度更大。因此如图18所示,从上方看,整个搅拌部340大致具有s型曲面形状。在搅拌臂341的端部设有斜面342。而搅拌臂341的另一端则连接到搅拌臂341的旋转轴343。通过旋转轴343,搅拌臂341围绕旋转轴343轴线转动。在本实施例中,斜面342的数量为2个,且关于旋转轴343中心对称。
128.搅拌部340是由不同材料构成的。具体地,搅拌部主体344是由硬质材料构成的,而在搅拌部边缘345是由软质材料构成的。这样,搅拌部接触菜品的部分主要是该软质材料。设置软质材料接触菜品的好处是,在搅拌的时候可以减少尤其是软质类菜品的损伤,保证了菜品的品相。在本技术中,软质材料是硅胶,通过注塑的工艺安装在搅拌部的边缘。采用该种材料的好处是,能够充分填补搅拌部340和锅302内壁之间的间隙,并且还不会出现卡住或者阻力过大的现象。而搅拌部主体344则是由金属材料构成,尤其以铝制或者铝合金材料为佳。在金属材料的表现还设有涂层,涂层优选为特氟龙材料。
129.搅拌部340的旋转轴343连接至第二齿轮块332的中心。如图15所示,旋转轴343的通过螺丝固定安装在第二齿轮块332,从而第二齿轮块332带动搅拌部340同步转动。第二齿轮块332的中心线定义为第二轴线337,因此搅拌部340可围绕第二轴线337旋转。第二轴线337与第一轴线327相互平行设置,且具有一定的间隔。或者说,第二轴线337相对第一轴线327偏心设置。值得注意的是,第一齿轮块331和第二齿轮块332啮合的位置位于第一轴线327和第二轴线337之间。当第二齿轮块332围绕第一齿轮块331转动时,就会带动搅拌部340围绕第二轴线337转动。锅铲组件320的支架326同时在围绕第一轴线327转动,因此搅拌部340同时围绕第一轴线327和第二轴线337转动。这样可以在不增加搅拌部340数量的前提下,增加在锅内的搅拌面积。如果把搅拌部340和驱动机构之间的元件定义为传动组件的话,传动组件具有两条传动路径。第一条传动路径,输出轴322直接带动支架326围绕第一轴线327转动,因此搅拌部340也相应围绕第一轴线327转动。而第二条传动路径,输出轴322 带动支架326的同时带动第二齿轮块332围绕第一齿轮块331传动,第二齿轮块332就带动搅拌部340围绕第二轴线337转动。如图15所示,为了良好的搅拌效果,搅拌部340从顶部到底部的高度l1的范围在25mm~35mm。而搅拌部 340的总长度l2优选为锅302的半径,最长不会
超过锅302的直径。而搅拌部 340顶部到锅盖303之间的距离l3的范围为45mm~65mm。
130.在另外一个实施例中,锅铲组件320的工作头还可以包括刮菜部350。刮菜部350的作用主要是把粘在锅内壁上的菜刮下来。在本实施例中,刮菜部350 同样受驱动组件321驱动而转动。具体地,刮菜部350受驱动围绕第一轴线327 转动。刮菜部350和支架326固定连接,因此刮菜部350随支架326一起转动。如图15到图17所示,刮菜部350和搅拌部340分别位于支架326的两侧,即以旋转中心线穿过的套筒323为中间,刮菜部350和搅拌部340分别位于套筒 323的两侧。并且刮菜部350到套筒323的距离大于搅拌部340到套筒323的距离。刮菜部350更远离套筒323,搅拌部340更靠近套筒323。或者说,刮菜部 350最远端到第一轴线327的水平距离大于搅拌部340最远端到第一轴线327的水平距离。
131.刮菜部350具有沿锅的径向延伸的刮菜臂351。刮菜臂351水平的连接支架 326,因此刮菜部350到锅底部的高度大于搅拌部340到锅底部的高度。也就是说,相较于刮菜部350,搅拌部340更靠近锅的底部。同搅拌部340相类似的一点,刮菜部主体352是由硬质材料构成的,而刮菜部靠近锅内壁的边缘353是由柔性材料构成的。
132.刮菜部350具有多种构型。在如图16所示的实施例中,刮菜部350具有横向刮菜边354和竖向刮菜边355配合形成。横向刮菜边354和竖向刮菜边355 构成t字型。并且刮菜臂351的一端连接竖向刮菜边355。在如图20所示的另外一个实施例中,刮菜部350同样具有横向刮菜边354和竖向刮菜边355。横向刮菜边354和竖向刮菜边355构成l型,刮菜臂351的一端连接横向刮菜边354。并且竖向刮菜边355相对于横向刮菜边354向下延伸。横向刮菜边354和竖向刮菜边355的连接处具有弧形引导结构356,实现更良好的刮菜效果。在如图 21所示的另一个实施例中,横向刮菜边354和竖向刮菜边355构成倒u型构造,刮菜臂351的一端连接横向刮菜边354,两个竖向刮菜边355分别连接在横向刮菜边354的两端。竖向刮菜边355向下延伸。优选的,竖向刮菜边355具有弯曲的弧形,且两个竖向刮菜边355的弯曲方向相对设置。
133.在如图19所示的一个实施例中,锅铲组件320的搅拌部340的一端水平设置,且在该搅拌部340的端面设有倾斜面346。倾斜面346自水平的搅拌臂341 向外延伸,并且高度逐渐降低。在该实施例中,搅拌部340仅围绕第一轴线327 转动。倾斜面346的数量可以是1个也可以是2个。如果是2个的话,2个倾斜面346分别从搅拌臂341向两侧延伸。倾斜面346的宽度与搅拌臂341的在该端部水平的长度一致。当然,在该实施例中,锅铲组件320还可以包括刮菜部 350。刮菜部350同样围绕第一轴线327转动。刮菜部350自旋转轴343沿径向向外延伸,刮菜部350和搅拌部340之间的夹角为180度。当然,在其他实施例中,锅铲组件320也可以不设置刮菜部350。
134.在本技术的另外一个实施例中,还涉及一种锅铲组件的控制方法。如图22 所示,该控制方法包括:控制所述锅铲组件旋转,在启动时间内控制所述锅铲组件的旋转速度为v1;在正常旋转时控制所述锅铲组件的旋转速度为v2,其中v2小于v1;当所述锅铲组件旋转角度达到w1时,控制所述锅铲组件停止旋转;重复以上步骤。在开始的步骤中,由于锅铲组件从静止到启动,需要短时间内达到较快的速度。因此驱动机构驱动锅铲组件以v1的速度旋转。其中启动时间优选为0.5秒~1.5秒。而以转速v2的步骤中,锅铲组件已经到达了正常工作的状态,此时驱动机构驱动锅铲组件以v2的速度旋转,其中v2是小于v1 的。也就是说,锅铲组件在正常工作时以较低的速度旋转。这是因为如果速度过高了,锅铲组件会对菜品
造成损害。在后续的步骤中,锅铲组件以v2的速度已经旋转了一定角度,驱动机构驱动锅铲组件暂停一段时间。其中步骤s3中旋转的角度优选为小于90度,暂停的时间优选为2~5秒。然后再重复之前的过程。这样设置使得锅铲组件能够间歇的旋转工作,对菜品的搅拌效果非常理想。值得注意的是,在斜面只有一个的实施例中,上述方法的锅铲组件的旋转方向为一个,即和斜面的倾斜方向一致。而在斜面有2个的实施例中,锅铲组件的旋转方向可以是一段时间内正转,另一段时间内反转。另外,以上述方法中,从启动开始到暂停作为旋转周期,在不同的周期内,控制的旋转角度或者暂停的时间都是可调的。
135.在此介绍本实施例的使用场景。本场景适用于对菜品翻炒阶段。此阶段开始时,锅铲组件需要从静止状态变化到启动状态,因此驱动机构控制锅铲组件在较短的时间内达到高转速。然后经过一段时间进入到正常工作状态,锅铲组件的转速变慢了下来,达到一个低转速的状态,这样可以实现更好的翻炒效果。当转过一定角度后,让锅铲组件停止转动,这样可以有利于减少菜品在锅内堆积的可能性。如同人的翻炒动作一样,有快有慢的翻炒,过一段时间会停止翻炒,让菜品内部也得到充分的均匀的烹饪效果。
136.另外,针对锅铲组件在翻炒过程中可能出现的堵转情况。为解决该种情况,本技术的一实施例揭示了一种控制方法。如图23所示,该控制方法包括:控制锅铲组件以一定速度转动。这种状态下,锅铲组件以正常状态工作。检测控制锅铲组件旋转的电机的电流,若电流增加未超过一设定值,则维持不变。通过检测电机的电流值,来识别是否遇到堵转的情况。若电流变化没有超过预设值,说明电机是处于正常工作的状态,则维持锅铲组件的转速不变。即保持原来的工作状态。若检测的电流增加超过一设定值,控制电机向相反方向旋转。电流增加超过设定值了,则说明电机遇到的堵转情况。在该种情况下,控制电机反向旋转。提升电机的电压并控制电机正向旋转。当电机反向旋转一定角度后,再调整提高电机的电压,增大其输出扭矩,然后正向旋转。继续检测电机的电流。若检测电流减少超过设定值,控制电机的电压下降,从而使得锅铲组件继续以一定速度转动。在该过程中,若电流减少超过设定值了,说明堵转问题得到解决了,回归到正常工作电流了。此时再控制电机的电压下降回到原来正常的状态。在该过程中,若检测电流减少未超过设定值,控制电机向相反方向旋转。若电流减少不明显或者说没有超过设定值,说明堵转问题仍然存在,这时控制电机反向旋转。利用反向的冲击力来解决堵转情况。值得注意的是,正常工作中,锅铲组件以一定的速度转动。该速度一般为30~50转/分钟。这是锅铲组件正常的旋转速度。当电机反向旋转一定角度后,优选地提升电机的电压至最大电压,这样提供更多的扭力。这个最大电压一般为12v。电机的电压下降后,锅铲组件的旋转速度优选地和在正常工作中的锅铲组件的旋转速度保持一致。在仍然堵转时,控制电机反向旋转的电压优选地仍然保持为最大电压。
137.在另外一种实施例中,如图24所示,控制方法的前面几步步骤与前一实施例中的前面几个步骤相同,区别仅在于其中一步步骤。在本实施例中,在该步骤中,控制电机停机而非控制其反向旋转。在一可选方案中,在该步骤中除了控制电机停机外,还可以发出报警信号。报警信号的形式可以是声音、光等。
138.另外,为了保障能够顺利的落料不会受到锅铲组件320影响,在锅铲组件上还设有传感器360,厨房机器人固定设有接收器361,响应于接收器361接收到的传感信号,加料单元4转动至出料位置时,锅铲组件320和落料口312在竖直方向上的投影没有重叠。这是因为当加料单元4准备落料入锅302内时,希望锅铲组件320不会遮挡落料口312。不然从落料口
312落入的调料很有可能掉落到锅铲组件320上,而不是直接落入锅302内,从而影响了用户体验。因此设置了接收器361和传感器360,在加料单元4落料前可以确保锅内的锅铲组件320没有影响到落料。在该实施例中,锅铲组件320固定设有传感器360,随着锅铲组件作旋转运动,传感器360相应做旋转运动。而用于接收传感器360 发出的传感信号的接收器361设置在旋转臂502的第一卡接部510上。这样设置的好处是一方面位置相对固定,另一方面设置在靠近旋转中心线的地方,可以更为准确的接收信号。由于锅盖303又固定连接在第一卡接部510上,因此传感器360也可以固定设置在锅盖303上。传感器360可以是接近传感器,即当传感器处于靠近接收器的位置时,接收器能够接收到传感器发出的信号,而当传感器处于远离接收器的位置时,接收器无法接收到传感器的信号。具体地,本技术中的传感器360可以是磁铁,而接收器361可以是磁控开关,其可以相应发出高电平信号或者低电平信号。根据传感器360相对于落料口312的位置,以及结合接收到的传感信号,就可以识别出锅铲组件320相对于落料口312的位置。
139.在其中一个实施例中,接收器361设置在远离落料口312的位置。锅铲组件320的旋转中心位于落料口312和接收器361之间。优选地,落料口312和接收器361相对于锅铲组件320的旋转中心的形成的夹角范围为90~270度。最优地,该夹角为180度。因此,锅铲组件320上的传感器360转动到靠近接收器的位置时,代表锅铲组件320没有挡住落料口312。此时,可控制进行落料。在本技术中,厨房机器人还包括微控制单元mcu,微控制单元mcu用接收信号并发出控制指令。微控制单元mcu在接收到接收器312发出的信号时,控制加料单元4可转动至出料位置。当锅铲组件320上的传感器360转动到远离接收器361的位置时,代表锅铲组件320有可能挡住落料口312。此时需要控制停止落料。具体地,微控制单元mcu在未接收到接收器发出的信号时,控制加料单元4停止转动。
140.结合到感应器的具体形式,当磁铁远离磁控开关时,磁控开关控制输出高电平信号;当磁铁接近磁控开关时,磁控开关控制输出低电平信号。当微控制单元mcu检测到低电平信号并持续一定时间后,控制加料单元4可转动至出料位置,加料单元4中的调料可以从落料口进入到锅内。优选情况下,持续的时间为0~30毫秒。
141.在另外一个实施例中,接收器361可安装在落料口312上。和前一实施例的控制逻辑类似,微控制单元mcu在接收到接收器361发出的信号时,代表锅铲组件320会阻挡到落料口312的落料,因此控制加料单元4停止转动。
142.下面介绍本技术的厨房机器人的使用场景。
143.场景一
144.当用户需要烹饪菜品而放入主料时,或者根据程序指令控制到了放入主料的阶段,用户外部输入指令或者程序内部设定的指令启动第一马达,第一马达就会通过旋转臂带动锅盖打开。当打开到位后,第一马达停止工作,锅盖会停留在预定位置。这时可以很方便地往锅内加入主料。当主料添加完毕后,再次外部输入指令或者程序内部指令启动第一马达带动关闭锅盖。经过一段短暂的时间锅盖完全盖在锅上,第一马达停止工作。而当后续需要添加调料等辅料时,由于有加料单元的存在,因此不需要再次打开锅盖。只有当最后菜品烹饪完毕需要出锅时,才需要控制打开锅盖。也就是说,整个烹饪过程只需要两次打开锅盖的过程,这就解决了以往烹饪过程中需要频繁打开锅盖的困扰,减少了用户的操作负担。
145.场景二
146.当用户需要添加辅料时,由于以前烹饪每道菜品需要多种辅料,例如,食用油、盐、葱、醋、酱油等等,而且根据每种辅料的添加时间也是各不相同的,所以对于用户来说手动的添加费时费力。而由于本技术的厨房机器人具有自动控制的加料单元,可以大大减少用户烹饪菜品所耗费的精力,提升烹饪的乐趣以及生活的品质。当处于添加辅料的阶段时,调料盒转动而依次出现多个加料位置。用户可以将当前菜品所需要的辅料依次放入到调料腔中,从而一次性的完成菜品所需要的所有辅料的添加。然后用户甚至可以离开厨房机器人去其他地方,避免了用户被束缚在厨房里。厨房机器人的加料单元可以根据程序控制,在预先设定的合适的时间段内,加料单元的调料盒旋转到出料位置,调料腔中的辅料经出料口进入到锅内。
147.场景三
148.当锅铲组件对锅内的菜品进行翻炒时,为了实现良好的翻炒效果。在锅铲组件启动时使其高速转动,当其正常工作时,锅铲组件以一低速转动。低速的搅拌有助于保护菜品不容易受到伤害。当锅铲组件以低速转动一定时间后,或者换算成转动了一定的角度后,这时菜品容易在搅拌后卷在一起,因此控制锅铲组件暂停转动,使菜品在没有外界的搅拌干扰下依靠自身的重力进行分散开,然后再次进行低速搅拌。使菜品翻炒的方式更加符合厨师搅拌的炒菜风格。
149.场景四
150.还有一些情况,随着翻炒程度的深入,一些菜品容易缠绕在锅铲组件上,从而增加了锅铲组件的负载,使驱动锅铲组件的电机出现堵转情况。对此检测电机的电流,若电流增加较大,说明遇到了堵转的情况。则控制锅铲组件反向旋转,使锅铲组件距离发生堵转的地方之间具有一定的行程。然后,控制提升电机的电压,优选至最大电压,这样电机就有较大的输出扭矩,然后使其正向旋转冲击刚才堵转的地方,如此就可以解决堵转的问题。然后,继续检测其电机的电流情况,若电流回复至正常状态,则说明堵转问题已经解决。若电流值仍然较大,说明堵转问题没有解决。为此还准备了备选计划,该计划包括控制提升电机的电压,优选至最大电压,目的是和前面一样的,提高电机的输出扭矩。然后控制电机反向旋转,使其反向旋转冲击刚才堵转的地方。
151.场景五
152.当加料单元通过落料口往锅内加入调料时,可能存在锅铲组件正好从落料口的下方经过,从而使调料落到了锅铲组件上而不是锅内的情况。对此,在锅铲组件和锅盖或者旋转臂上设置传感器和接收器。然后根据传感器的信号来感应锅铲组件的位置。当判断出锅铲组件远离落料口时,控制加料单元可以从落料口加入调料。从而避免了落料落在锅铲组件上的困扰。
153.需要说明的是,对于前述的各方法实施例,为了简便描述,故将其都表述为一系列的动作组合,但是本领域技术人员应该知悉,本技术并不受所描述的动作顺序的限制,因为依据本技术,某些步骤可以采用其它顺序或者同时进行。其次,本领域技术人员也应该知悉,说明书中所描述的实施例均属于优选实施例,所涉及的动作和模块并不一定都是本技术所必须的。
154.在上述实施例中,对各个实施例的描述都各有侧重,某个实施例中没有详述的部分,可以参见其它实施例的相关描述。
155.以上公开的本技术优选实施例只是用于帮助阐述本技术。可选实施例并没有详尽叙述所有的细节,也不限制该实用新型仅为所述的具体实施方式。显然,根据本说明书的内容,可作很多的修改和变化。本说明书选取并具体描述这些实施例,是为了更好地解释本技术的原理和实际应用,从而使所属技术领域技术人员能很好地理解和利用本技术。本技术仅受权利要求书及其全部范围和等效物的限制。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1