清洁机器人的制作方法
1.本实用新型属于清洁设备技术领域,具体提供了一种清洁机器人。
背景技术:
2.清洁机器人是人们常用的一种清洁设备,现有的清洁机器人主要包括扫地机器人和拖地机器人。其中拖地机器人在执行拖地功能时,大多都是通过设置在拖地机器人上的拖地组件来对地面进行擦拭,以达到洁净地面的目的。
3.现有技术中的清洁机器人在执行拖地功能时,主要是通过主机带动拖地组件在地面上进行移动,进而带动安装于拖地组件底部的拖布一起运动,来对地面进行擦拭。而现有技术中存在的技术问题是,清洁机器人带动拖布进行一次性擦拭时很难将地面上的顽固性污渍清除,需要往复多次进行擦拭才能达到清洁效果,清洁效率低下。
技术实现要素:
4.为了解决现有技术中的上述问题,本实用新型提供了一种清洁机器人,包括主机和可拆卸地安装到所述主机上的拖地组件,所述拖地组件包括储液箱和底板,所述底板可活动地安装在所述储液箱的底部,所述底板的下表面用于安装拖布;所述清洁机器人还包括驱动装置,所述驱动装置与所述底板驱动连接,所述驱动装置能够驱使所述底板带动所述拖布在水平方向上往复移动。
5.作为优选的实现方式,所述驱动装置设于所述主机上,所述驱动装置包括电机和与所述电机的转轴固定连接的偏心轮,所述底板的顶部设有容纳槽,所述偏心轮从所述底板的上方伸入所述容纳槽,以使转动的所述偏心轮能够与所述容纳槽的侧壁滑动接触,从而驱使所述底板和所述拖布在水平方向上往复移动。
6.作为优选的实现方式,所述底板的顶部设置有凸筋,所述容纳槽被所述凸筋和所述底板的顶面围绕而成;所述容纳槽在前后方向上的尺寸大于其在左右方向上的尺寸,以使转动的所述偏心轮仅能够与所述容纳槽的左侧壁和右侧壁抵接并驱动所述底板沿所述清洁机器人的左右方向往复移动。
7.作为优选的实现方式,所述拖地组件还包括设于所述底板与所述储液箱之间的弹性元件,所述弹性元件的两端分别与所述底板和所述储液箱抵接,以使所述底板能够相对于所述储液箱上下浮动。
8.作为优选的实现方式,所述储液箱还包括设置在箱体的底部后侧的支撑轮,所述支撑轮和所述拖布配置成,在所述拖布与地面不接触的状态下,所述支撑轮的最底端高于所述拖布的底面。
9.作为优选的实现方式,所述支撑轮和所述拖布还配置成,在所述清洁机器人与地面接触的状态下,所述清洁机器人的重量能够使所述拖布的底面靠近所述箱体的底面,以使所述支撑轮与所述地面接触。
10.作为优选的实现方式,所述储液箱上设置有用于向所述拖布提供清洁液的供液
孔;所述储液箱上还设置有出液孔和与所述供液孔连通的进液孔;所述主机上还设置有输送泵,所述输送泵配置成能够从所述出液孔接收来自所述储液箱的清洁液,并将接收到的清洁液输送给所述进液孔,进而使所述进液孔和所述供液孔将清洁液引导至所述拖布。
11.作为优选的实现方式,所述主机上设置有向后侧延伸的两个固定板,每一个所述固定板上都设置有锁钩;所述储液箱还包括设置在所述箱体左右两侧的锁舌和与所述锁舌驱动连接的操作键;所述锁舌与所述锁钩钩接到一起,并因此将所述储液箱与所述主机固定到一起,所述操作键能够驱使所述锁舌与所述锁钩分离,以使所述储液箱从所述主机上拆卸下来。
12.作为优选的实现方式,所述拖布的前侧边为所述拖布的横向距离最大的直边,所述拖布上设有沿所述直边布置的插条,所述底板的前侧设有与所述插条相对应的插槽,所述插条插入所述插槽以卡嵌固定所述拖布的前侧。
13.作为优选的实现方式,所述主机的后部还设置有安装腔,所述清洁机器人还包括尘盒,所述安装腔包括与所述尘盒相对应的第一安装腔和与所述拖地组件相对应的第二安装腔,所述第一安装腔与所述第二安装腔相互独立并且彼此相接,以使所述尘盒和所述拖地组件能够择一或者同时安装到所述主机上。
14.本领域技术人员能够理解的是,本实用新型前述的清洁机器人至少具有如下有益效果:
15.1、通过在清洁机器人内设置驱动装置,并在储液箱的底部设置可活动的底板,并使驱动装置与底板驱动连接,使得驱动装置运转时,能够带动底板与拖布在水平方向上做往复移动,使得拖布不仅可以随着清洁机器人的前进而前进,对地面进行托擦;而且还能够在水平方向上相对于主机做往复运动,对地面进行反复托擦。因此,本公开的清洁机器人在执行拖地作业时,清洁机器人能够对每一个托擦区域进行多次擦拭,进而能够有效地擦除地面上的顽固污渍。
16.2、通过在底板与储液箱之间设置弹性元件,并使弹性元件的两端分别与底板与储液箱抵接,使得底板能够相对于储液箱上下移动,以适应高低不同的地面,以便底板能够随地面的起伏而上下浮动,使设置于底板下表面的拖布在最大程度上与地面贴合,提高对地面清洁的效果。同时还能够提供给底板一个向下的弹性力,从而使地板压紧拖布,使拖布紧贴地面,以便增加拖布与地面之间的摩擦力,擦除地面上较为顽固的污渍。
17.3、通过在储液箱的底部后侧设置支撑轮,并将支撑轮配置成,在拖布与地面不接触的状态下,支撑轮的最底端高于拖布的底面;在拖布与地面接触的状态下,清洁机器人的重量能够使拖布的底面靠近箱体的底面,以使支撑轮与所述地面接触,进而限制储液箱的下降程度。通过支撑轮限制储液箱的下降程度,一方面,避免出现储液箱与地面过度挤压拖布,将拖布中的清洁液挤出,在地面上留有水渍的情况发生;另一方面,避免出现储液箱与地面过度挤压拖布,造成拖布不能够自储液箱中吸收足够的清洁液,导致无法对地面进行有效的湿润与托擦。
附图说明
18.下面参照附图来描述本实用新型的部分实施例,附图中:
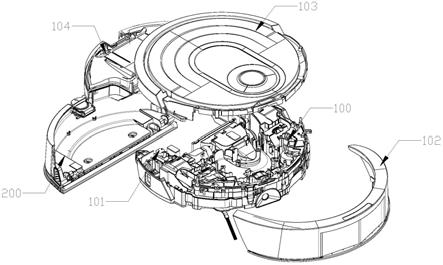
19.图1是本实用新型清洁机器人的结构分解图的第一轴测视图;
20.图2是本实用新型清洁机器人的结构分解图的第二轴测视图;
21.图3是本实用新型清洁机器人的结构示意图;
22.图4是本实用新型的拖地组件的轴测视图;
23.图5是本实用新型的拖地组件的前视图;
24.图6是本实用新型的拖布的轴测视图;
25.图7是本实用新型的底板与储液箱的配合关系示意图;
26.图8是本实用新型插条与插槽的一种实施方式示意图;
27.图9是本实用新型插条与插槽的另一种实施方式示意图;
28.图10是本实用新型驱动装置的结构示意图。
29.附图标记列表:
30.100、主机;101、驱动装置;1011、电机;1012、偏心轮;102、主机碰撞板;103、主机顶板;104、尘盒;105、固定板;106、锁钩;107、第一安装腔;108、第二安装腔;110、安装腔;
31.200、拖地组件;210、储液箱;211、侧板;212、支撑轮;213、供液孔;214、进液孔;215、出液孔;
32.220、底板;221、插槽;2211、插槽主体;2212、扩口结构;2213、封闭端;2214、槽口;222、导水孔;223、容纳槽;224、凸筋;
33.230、拖布;231、插条;2311、插接结构;2312、连接结构;2313、弧形结构;232、提拉部;233、拖布顶面;
34.240、锁舌、241、操作键;
35.250、弹性元件。
具体实施方式
36.本领域技术人员应当理解的是,下文所描述的实施例仅仅是本实用新型的一部分实施例,而不是本实用新型的全部实施例,该一部分实施例旨在用于解释本实用新型的技术原理,并非用于限制本实用新型的保护范围。基于本实用新型提供的实施例,本领域普通技术人员在没有付出创造性劳动的情况下所获得的其它所有实施例,仍应落入到本实用新型的保护范围之内。
37.需要说明的是,在本实用新型的描述中,术语“中心”、“上”、“下”、“顶部”“底部”、“左”、“右”、“竖直”、“水平”、“内”、“外”等指示方向或位置关系的术语是基于附图所示的方向或位置关系,这仅仅是为了便于描述,而不是指示或暗示所述装置或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本实用新型的限制。此外,术语“第一”、“第二”、“第三”仅用于描述目的,而不能理解为指示或暗示相对重要性。
38.此外,还需要说明的是,在本实用新型的描述中,除非另有明确的规定和限定,术语“安装”、“相连”、“连接”应做广义理解,例如,可以是固定连接,也可以是可拆卸连接,或一体地连接;可以是机械连接,也可以是电连接;可以是直接相连,也可以通过中间媒介间接相连,还可以是两个元件内部的连通。对于本领域技术人员而言,可根据具体情况理解上述术语在本实用新型中的具体含义。
39.如图1和图2所示,本实施例的清洁机器人主要包括主机100、驱动装置101、主机碰撞板102、主机顶板103、拖地组件200与尘盒104。主机碰撞板102与主机顶板103分别安装于
主机100的前侧面与顶部。
40.如图3所示,主机100的后部还设置有安装腔110,安装腔110包括与尘盒104相对应的第一安装腔107和与拖地组件200相对应的第二安装腔108,第一安装腔107与第二安装腔108相互独立并且彼此相接,以使尘盒104和拖地组件200能够择一或者同时安装到主机上。
41.如图3至图5所示,拖地组件200包括储液箱210和可活动安装于储液箱210底部的底板220,底板220的下表面用于安装拖布230。拖布230的前侧边为拖布230横向距离最大的直边,拖布230上设置有沿直边布置的插条231,底板220的前侧设有与插条231相对应的插槽221,插条231能够插入插槽221中以卡嵌固定拖布230的前侧。通过插条231与插槽221的卡嵌配合,使得拖布230的前侧边被限定在底板220的固定位置,在清洁机器人进行拖地工作时,避免拖布230的前侧边由于摩擦力而向下弯折出现卷边,最终导致拖布230的卷边影响清洁机器人正常运动的情况发生,进而拖布230不会出现由于与地面剐蹭而脱离底板220的情况。
42.如图1至图5所示,驱动装置101能够与底板220驱动连接,并能够驱使底板220带动拖布230在水平方向上往复移动。通过驱动装置101的设置,使得清洁机器人在执行拖地功能时,驱动装置101能够带动拖布230能够在水平方向上做往复移动,进而实现对其下方的地面进行反复托擦,擦拭次数与底板220的往复移动频率呈正相关的态势。其中本实用新型中的驱动装置101可以是任意可行的驱动装置例如驱动电机、气压驱动装置、液压驱动装置等。清洁机器人在前进过程中,使得拖布230不仅可以随着清洁机器人的前进而前进,对地面进行托擦;而且还能够在水平方向上相对于主机100做往复运动,对地面进行反复托擦,因此能够对地面上的顽固污渍起到更好的清洁效果。
43.如图5和图6所示,储液箱210的箱体的后侧部形成有侧板211,拖布230的后端设置有提拉部232,当拖布230的前侧边通过插槽221与插条231卡嵌固定之后,通过将拖布顶面233覆盖于底板220底部,并将设置于拖布230后端的提拉部232进行翻折,使得提拉部232能够与侧板211接触并进行固定,来达到拖布230的后侧固定于底板220上不易脱落的技术效果。其中,提拉部232与侧板211的固定方式和拖布顶面233与底板220底部的固定方式可采用多种任意可行的结构,例如通过魔术贴粘合、磁吸式粘合、卡扣配合等。
44.如图1至图5所示,主机100上设置有向后侧延伸的两个固定板105,每一个固定板105上都设置有锁钩106;另外,储液箱210设置有位于箱体左右两侧的锁舌240和与锁舌240驱动连接的操作键241,作为优选的实现方式,操作键241通过弹簧与储液箱210抵接,使得操作键241能够带动锁舌240进行移动与复位。当使用者需要将储液箱210安装于主机100上时,通过将储液箱210设置有锁舌240的一侧与主机100设置有锁钩106的一侧抵接,使得锁钩106压迫锁舌240移动,直至锁钩106与锁舌240钩接到一起;当使用者需要将储液箱210自主机100上拆下时,使用者通过按压操作键241,迫使操作键241带动锁舌240与锁钩106分离,以使储液箱210能够从主机100上拆卸下来。
45.如图5至图7所示,储液箱210还包括设置在箱体底部后侧的支撑轮212,支撑轮212与拖布230配置成,当拖布230与地面不接触的状态下,在垂直方向上,支撑轮212的最底端高于拖布230的底面;支撑轮212和拖布230还配置成,当拖布230与地面进行接触的状态下,通过清洁机器人的重量能够使拖布230的底面靠近储液箱210的底面,以使得支撑轮212相对于拖布230朝向地面平移,最终与地面接触。通过在储液箱210底部后侧设置支撑轮212,
限制储液箱210的下降程度,一方面,避免出现储液箱210与地面过度挤压拖布230,将拖布230中的清洁液挤出,在地面上留有水渍的情况发生;另一方面,避免出现储液箱210与地面过度挤压拖布230,造成拖布230不能够自储液箱210中吸收足够的清洁液,导致拖地效果较差的情况发生。
46.如图3至图7所示,储液箱210上设置有用于向拖布提供清洁液的供液孔213,储液箱210上还设置有出液孔215和与供液孔213连通的进液孔214,主机上还设置有输送泵,输送泵配置成能够从出液孔215接收来自储液箱210的清洁液,并将接收到的清洁液输送给进液孔214,进而使进液孔214和供液孔213将清洁液引导至拖布230。底板220底部设置有导水孔222,导水孔222与供液孔213位置相对应,以使得清洁液自供液孔213流出后通过导水孔222直接落入拖布230上,浸润拖布进行拖地功能。
47.如图3至图9所示,底板220的前侧设置有插槽221,插槽221包括插槽主体2211、设置于插槽主体2211一端的扩口结构2212、设置于插槽主体2211另一端的封闭端2213、延伸于插槽主体2211的槽口2214。拖布230的前侧边设置有插条231,插条231包括插接结构2311与连接结构2312,连接结构2312用于连接插接结构2311与拖布230。通过将插条231的插接结构2311自插槽221的扩口结构2212插入至插槽221内部,直至插接结构2311与另一端的封闭端2213相互抵接,并且槽口2214允许连接结构2312穿过,使得插条231整体被固定于插槽221内,只能允许插条231抽出或插入插槽221。
48.通过在插槽221的一端设置有扩口结构2212,且扩口结构2212被设置为前端开口较大,逐渐向后收缩,直至允许插接结构2311插入,使得在安装插条231时,能够对插条231起到引导作用,方便使用者将插条231插入插槽221内部,或者,当使用者需要在插槽221中取出插条231时,扩口结构2212为插条231留出把持空间,方便使用者把持插条231并将插条231抽出插槽221。
49.如图8和图9所示,作为一种优选的实现方式,通过将底板220上设有插槽221的一端向底板220的顶部翘起,当拖布230的插条231安装于插槽221时,使得拖布230的前端也能够向上翘起。当清洁机器人在进行拖地工作时,拖布230的前侧边向上翘起不与地面直接接触,进而避免了与地面上的凸起剐蹭,致使拖布230前侧边出现卷边、褶皱的情况发生。另外,拖布230与地面进行接触的部分起到主要的清洁功能,而向上翘起部分的拖布230不与地面直接接触,因此,该部分的拖布230较为洁净,当使用者需要在底板220上拆下拖布230时,可以通过把持较为洁净部分来将拖布230于底板220上拆卸下来,提升使用者的使用体验。
50.如图9所示,作为另一种实现方式,通过将插槽221的槽口2214朝向底板220的顶部,当拖布230的插条231安装于插槽221时,使槽口2214允许拖布230的前部穿过并与插槽221内的插条231连接到一起,使得拖布230的前部包裹底板220的前端之后形成向上翘起的弧形结构2313,或者,插槽221的槽口2214还可以朝向底板220的底部,以使拖布230的前部包裹插槽221的下侧壁之后形成向上翘起的弧形结构2313。其中需要说明的是,槽口2214并不局限于朝向底板220的顶部或者底部,也可以与底板220所在的水平面夹有一定的角度,例如60度角、80度角等,只要能够使拖布230的前侧边形成向上翘起的弧形结构2313,都应在本实用新型的保护范围之内。
51.本领域技术人员能够理解的是,当清洁机器人在进行拖地工作时,与地面直接接
触的拖布230部分对地面进行擦拭,而通过弧形结构2313对拖布230的前侧边进行抬高,使得弧形结构2313部分的拖布230与地面彼此分离,因此,弧形结构2313部分的拖布230避免了与地面直接接触,拖布230的前侧边不会出现卷边、褶皱。另外,弧形结构部分的拖布230较为洁净,当使用者需要在底板220上拆下拖布230时,可以通过把持较为洁净部分来将拖布230于底板220上拆卸下来。另外,通过上述结构,使拖布230的前部还能够对底板220的前端或者插槽231的下侧壁进行包裹,使得底板220的前端在日常清洁过程中不易被弄脏,减轻使用者的清理工作。
52.如图1至图10所示,驱动装置101设置于主机100上,驱动装置101包括电机1011和与电机1011的转轴固定连接的偏心轮1012,其中偏心轮1012可以通过固定连接件安装于电机1011的转轴上,或者,偏心轮1012与电机1011的转轴一体成型制成。底板220的顶部设置有容纳槽223,通过将偏心轮1012从底板220的上方伸入容纳槽223,当驱动装置101带动偏心轮1012进行转动时,使得偏心轮1012能够与容纳槽223的侧壁滑动接触,从而驱使底板220和拖布230在水平方向上往复移动。通过上述结构,当清洁机器人进行拖地工作时,驱动装置101能够带动底板220与拖布230在水平方向上做往复移动,进而使拖布230在随着清洁机器人行进的过程中,拖布230能够在驱动装置101的带动下对其下方的地面进行反复的托擦,进而提升了清洁机器人的托擦效果。因此,本公开的清洁机器人在执行拖地作业时,清洁机器人能够对每一个托擦区域进行多次擦拭,进而能够有效地擦除地面上的顽固污渍。
53.作为一种优选的实现方式,底板220的顶部设置有凸筋224,容纳槽223被凸筋224和底板220的顶面围绕而成,通过将容纳槽223设置为在前后方向上的尺寸大于其在左右方向上的尺寸,使得偏心轮1012仅能够与容纳槽223的左侧壁和右侧壁抵接。偏心轮1012伸入容纳槽223并由驱动装置101带动转动,当偏心轮1012与容纳槽223的左侧壁接触时,偏心轮1012带动底板220向左侧偏移;而后偏心轮1012继续转动至与左侧壁脱离接触,此时偏心轮1012不与任何侧壁接触;偏心轮1012继续转动,直至与容纳槽223的右侧壁接触,偏心轮1012带动底板220向右侧偏移;而后偏心轮1012继续转动至与右侧壁脱离接触,此时偏心轮1012不与任何侧壁接触。通过驱动装置101带动偏心轮1012循环转动,使得底板220不断循环上述动作,最终体现于底板220沿清洁机器人的左右方向往复移动。
54.如图5至图7所示,拖地组件200还包括设置于底板220与储液箱210之间的弹性元件250,弹性元件250的两端分别与底板220和储液箱210抵接,以使底板220能够相对于储液箱210上下浮动。弹性元件250可以选择弹簧、片簧等多种弹性体。通过在底板220与储液箱210之间设置弹性元件250,使得清洁机器人在平整度较差的地面上进行拖地工作时,底板220能够适应地面的起伏而上下浮动,在最大程度上与地面贴合,提高地面清洁的效果。另外,通过在底板220与储液箱210之间设置弹性元件250,能够提供给底板220一个向下的力,提高拖布230与地面之间的摩擦力,能够擦去一些较为顽固的污渍,提高清洁能力。
55.通过上述实施方式,本领域技术人员能够理解的是,拖地组件200通过在拖布230前侧边设置插条231,并在底板220的前侧设置与插条231相对应的插槽221,使拖布230的前侧边能够通过插条231卡嵌固定到底板220的插槽231上,使得清洁机器人在进行拖地工作时,拖布230的前端不会因与地面的刮蹭而出现褶皱、卷边,进而避免了出现拖布230脱离底板的情况。另外,底板220配置成能够沿着所述箱体的前后方向和/或左右方向晃动。提高清洁机器人的清洁效率与清洁效果。
56.至此,已经结合前文的多个实施例描述了本实用新型的技术方案,但是,本领域技术人员容易理解的是,本实用新型的保护范围并不仅限于这些具体实施例。在不偏离本实用新型技术原理的前提下,本领域技术人员可以对上述各个实施例中的技术方案进行拆分和组合,也可以对相关技术特征作出等同的更改或替换,凡在本实用新型的技术构思和/或技术原理之内所做的任何更改、等同替换、改进等都将落入本实用新型的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1