一种清洁机器人的制作方法
1.本发明涉及机器人技术领域,尤其涉及一种清洁机器人。
背景技术:
2.机器人是一种能够半自主或全自主工作的智能机器。机器人具有感知、决策、执行等基本特征,可以辅助甚至替代人类完成危险、繁重、复杂的工作,提高工作效率与质量,服务人类生活,扩大或延伸人的活动及能力范围。
3.随着城市化的发展,城市里越来越多的写字楼拔地而起,很多大城市内的写字楼都会使用玻璃幕墙,采光好,有利于办公,玻璃幕墙的清洁一直是一个问题,现有的玻璃幕墙大多使用人工进行清洁,这类清洁人员被称为“蜘蛛人”,在很高的地方清洁玻璃幕墙极容易发生危险,清洁人员的生命得不到保障。
4.因此,有必要提供一种新的清洁机器人解决上述技术问题。
技术实现要素:
5.本发明解决的技术问题是提供一种代替人工对玻璃幕墙进行清洁,安全可靠,清洁效果好的清洁机器人。
6.为解决上述技术问题,本发明提供的清洁机器人包括:
7.自动横向移动刷洗装置;
8.控制箱,所述控制箱安装在所述自动横向移动刷洗装置的顶侧;
9.四个第一气缸,四个所述第一气缸均匀分布在所述控制箱的四周,所述第一气缸均为横向设置;
10.四个第二气缸,四个所述第二气缸分别安装在四个所述第一气缸的输出轴上,所述第二气缸为竖向设置;
11.四个吸盘,所述吸盘安装在所述第二气缸的输出轴上;
12.四个真空泵,所述真空泵固定安装在所述第二气缸的一侧,所述真空泵的进气孔连接有软管,所述吸盘上设置有抽真空口,所述软管的一端与所述抽真空口相连接。
13.优选的,所述控制箱的顶侧连接有安全绳。
14.优选的,所述自动横向移动刷洗装置包括底座,所述底座的底侧开设有放置槽,所述放置槽内固定安装有电机,所述电机的输出轴上固定安装有丝杆,所述丝杆的上螺纹套接有移动座,所述移动座的底侧延伸至所述放置槽外并固定连接有连接板,所述连接板的底侧安装有刷洗装置。
15.优选的,所述放置槽的顶侧内壁上开设有限位槽,所述限位槽内固定安装有固定杆,所述移动座的顶侧固定安装有限位块,限位块与所述固定杆滑动套接。
16.优选的,所述放置槽的一侧内壁上安装有轴承座,所述轴承座与所述丝杆转动套接。
17.优选的,所述刷洗装置包括转板,所述转板的底侧设置有刷毛,所述转板转动安装
在所述连接板的底侧,所述连接板的底侧转动安装有第三气缸,所述第三气缸的输出轴上转动连接有滑块,所述转板靠近所述第三气缸的一侧固定安装有滑轨,所述滑轨与所述滑块滑动连接。
18.优选的,所述的一侧清洗剂自动添加设备,所述清洗剂自动添加设备与所述刷毛相连接。
19.优选的,所述清洗剂自动添加设备包括清洗剂容纳箱,所述清洗剂容纳箱的底侧设有液体出口,所述液体出口上连接有导管,所述连接板的顶侧安装有水泵,所述导管与所述水泵的进水口相连接,所述水泵的出水口连接有软管,所述转板内开设有空腔,所述空腔的底侧内壁上开设有多个通道,所述通道的出口位于所述刷毛之间,所述软管延伸至所述空腔内。
20.优选的,所述控制箱内设置有gps定位模块、单片机、无线通讯模块,所述gps定位模块和无线通讯模块均与所述单片机相连接,所述第一气缸、所述第二气缸、所述真空泵均与所述单片机相连接。
21.与相关技术相比较,本发明提供的清洁机器人具有如下有益效果:
22.本发明提供一种清洁机器人,通过安全绳将机器人放至工作位置,通过远程控制器与无线通讯模块进行信号接收,从而控制控制箱.通过控制箱启动真空泵,真空泵将吸盘内的空气抽出,吸盘内形成负压牢牢吸附在玻璃幕墙上,此时启动第三气泵,第三气泵带动转板转动,转板带动刷毛与玻璃幕墙相接触,此时启动水泵,水泵将清洗剂从清洗剂容纳箱内抽出,通过软管抽入空腔内,在流入通道内,最后从通道流出,流到刷毛上,此时启动电机,电机的输出轴带动丝杆转动,丝杆带动移动座沿着丝杆滑动,移动座带动连接板移动,连接板带动转板移动,转板带动沾有清洗剂的刷毛在转板上刷洗,来回刷洗多次,达到清洗的目的;当机器人需要移动时,其中两个相对的第二气缸抬起,还有两个第二气缸通过吸盘吸附在玻璃幕墙上,然后其中一个连接抬起的第二气缸的第一气缸伸长,带动第二气缸进行位移,再降下第二气缸上吸盘,是洗盘吸附在玻璃幕墙上,然后抬起两个没有移动的第二气缸,收缩第一气缸,完成一步移动,重复此步骤机器人可进行移动,代替人工对玻璃幕墙进行清洁,安全可靠,清洁效果好,结构简单,操作方便。
附图说明
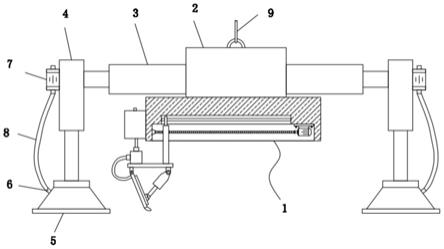
23.图1为本发明提供的清洁机器人的一种较佳实施例的结构示意图;
24.图2为图1所示的俯视结构示意图;
25.图3为图1所示的自动横向移动刷洗装置的结构示意图;
26.图4为图1所示的转板的结构示意图。
27.图中标号:1、自动横向移动刷洗装置,2、控制箱,3、第一气缸,4、第二气缸,5、吸盘,6、抽真空口,7、真空泵,8、软管,9、安全绳,10、底座,11、放置槽,12、电机,13、丝杆,14、限位槽,15、固定杆,16、移动座,17、限位块,18、连接板,19、转板,20、刷毛,21、滑轨,22、滑块,23、第三气缸,24、清洗剂容纳箱,25、导管,26、水泵,27、软管,28、空腔,29、通道。
具体实施方式
28.下面结合附图和实施方式对本发明作进一步说明。
29.请结合参阅图1、图2、图3和图4,其中,图1为本发明提供的清洁机器人的一种较佳实施例的结构示意图;图2为图1所示的俯视结构示意图;图3为图1所示的自动横向移动刷洗装置的结构示意图;图4为图1所示的转板的结构示意图。清洁机器人包括:
30.自动横向移动刷洗装置1;
31.控制箱2,所述控制箱2安装在所述自动横向移动刷洗装置1的顶侧;
32.四个第一气缸3,四个所述第一气缸3均匀分布在所述控制箱2的四周,所述第一气缸3均为横向设置;
33.四个第二气缸4,四个所述第二气缸4分别安装在四个所述第一气缸3的输出轴上,所述第二气缸4为竖向设置;
34.四个吸盘5,所述吸盘5安装在所述第二气缸4的输出轴上;
35.四个真空泵7,所述真空泵7固定安装在所述第二气缸4的一侧,所述真空泵7的进气孔连接有软管8,所述吸盘5上设置有抽真空口6,所述软管8的一端与所述抽真空口6相连接。
36.所述控制箱2的顶侧连接有安全绳9。
37.所述自动横向移动刷洗装置包括底座10,所述底座10的底侧开设有放置槽11,所述放置槽11内固定安装有电机12,所述电机12的输出轴上固定安装有丝杆13,所述丝杆13的上螺纹套接有移动座16,所述移动座16的底侧延伸至所述放置槽11外并固定连接有连接板18,所述连接板18的底侧安装有刷洗装置。
38.所述放置槽11的顶侧内壁上开设有限位槽14,所述限位槽14内固定安装有固定杆15,所述移动座16的顶侧固定安装有限位块17,限位块17与所述固定杆15滑动套接。
39.所述放置槽11的一侧内壁上安装有轴承座,所述轴承座与所述丝杆13转动套接。
40.所述刷洗装置包括转板19,所述转板19的底侧设置有刷毛20,所述转板19转动安装在所述连接板18的底侧,所述连接板18的底侧转动安装有第三气缸23,所述第三气缸23的输出轴上转动连接有滑块22,所述转板19靠近所述第三气缸23的一侧固定安装有滑轨21,所述滑轨21与所述滑块22滑动连接。
41.所述10的一侧清洗剂自动添加设备,所述清洗剂自动添加设备与所述刷毛20相连接。
42.所述清洗剂自动添加设备包括清洗剂容纳箱24,所述清洗剂容纳箱24的底侧设有液体出口,所述液体出口上连接有导管25,所述连接板18的顶侧安装有水泵26,所述导管25与所述水泵26的进水口相连接,所述水泵26的出水口连接有软管27,所述转板19内开设有空腔28,所述空腔28的底侧内壁上开设有多个通道29,所述通道29的出口位于所述刷毛20之间,所述软管27延伸至所述空腔28内。
43.所述控制箱2内设置有gps定位模块、单片机、无线通讯模块,所述gps定位模块和无线通讯模块均与所述单片机相连接,所述第一气缸3、所述第二气缸4、所述真空泵7均与所述单片机相连接。
44.本发明提供的清洁机器人的工作原理如下:工作时,先用安全绳9将机器人放至工作位置,通过远程控制器与无线通讯模块进行信号接收,从而控制控制箱2.通过控制箱2启动真空泵7,真空泵7将吸盘5内的空气抽出,吸盘5内形成负压牢牢吸附在玻璃幕墙上,此时启动第三气泵23,第三气泵23带动转板19转动,转板19带动刷毛与玻璃幕墙相接触,此时启
动水泵26,水泵26将清洗剂从清洗剂容纳箱24内抽出,通过软管27抽入空腔28内,在流入通道29内,最后从通道29流出,流到刷毛20上,此时启动电机12,电机12的输出轴带动丝杆13转动,丝杆13带动移动座16沿着丝杆13滑动,移动座16带动连接板18移动,连接板18带动转板19移动,转板19带动沾有清洗剂的刷毛20在转板19上刷洗,来回刷洗多次,达到清洗的目的;当机器人需要移动时,其中两个相对的第二气缸4抬起,还有两个第二气缸4通过吸盘5吸附在玻璃幕墙上,然后其中一个连接抬起的第二气缸4的第一气缸3伸长,带动第二气缸4进行位移,再降下第二气缸4上吸盘5,是洗盘5吸附在玻璃幕墙上,然后抬起两个没有移动的第二气缸4,收缩第一气缸3,完成一步移动,重复此步骤机器人可进行移动。
45.与相关技术相比较,本发明提供的清洁机器人具有如下有益效果:
46.本发明提供一种清洁机器人,通过安全绳9将机器人放至工作位置,通过远程控制器与无线通讯模块进行信号接收,从而控制控制箱2.通过控制箱2启动真空泵7,真空泵7将吸盘5内的空气抽出,吸盘5内形成负压牢牢吸附在玻璃幕墙上,此时启动第三气泵23,第三气泵23带动转板19转动,转板19带动刷毛与玻璃幕墙相接触,此时启动水泵26,水泵26将清洗剂从清洗剂容纳箱24内抽出,通过软管27抽入空腔28内,在流入通道29内,最后从通道29流出,流到刷毛20上,此时启动电机12,电机12的输出轴带动丝杆13转动,丝杆13带动移动座16沿着丝杆13滑动,移动座16带动连接板18移动,连接板18带动转板19移动,转板19带动沾有清洗剂的刷毛20在转板19上刷洗,来回刷洗多次,达到清洗的目的;当机器人需要移动时,其中两个相对的第二气缸4抬起,还有两个第二气缸4通过吸盘5吸附在玻璃幕墙上,然后其中一个连接抬起的第二气缸4的第一气缸3伸长,带动第二气缸4进行位移,再降下第二气缸4上吸盘5,是洗盘5吸附在玻璃幕墙上,然后抬起两个没有移动的第二气缸4,收缩第一气缸3,完成一步移动,重复此步骤机器人可进行移动,代替人工对玻璃幕墙进行清洁,安全可靠,清洁效果好,结构简单,操作方便。
47.以上所述仅为本发明的实施例,并非因此限制本发明的专利范围,凡是利用本发明说明书及附图内容所作的等效结构或等效流程变换,或直接或间接运用在其它相关的技术领域,均同理包括在本发明的专利保护范围内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1