一种枕头的制作方法
1.本发明涉及一种枕头,尤其是一种能改变高度的枕头。
背景技术:
2.专利cn2020111964449和cn2020205867790分别公开了两种能改变高度的枕头,两种方案都采用了两根等长连杆x型铰接成的升降支架,并且电机都布置在枕头内部。
3.上述方案中枕头的最低高度受到升降支架结构和电机尺寸的限制,不能降到很低,对于颈椎病患者等需要低枕高的使用者不适用,且电机布置在枕头内部,转动噪音离头部较近,容易干扰睡眠。
技术实现要素:
4.本发明的目的是提供一种能改变高度的枕头。
5.本发明的枕头包括至少一底板和至少一枕板,枕板上部能布置至少一枕垫,头能枕在枕垫上。枕板上部能布置至少一垫板,柔性枕垫能布置在垫板上,垫板与枕板间能布置压力传感器。
6.枕板与底板间布置有至少一升降机构,升降机构能升高/降低枕板高度,进而改变枕头高度,枕板与升降机构间布置有至少一居中机构,居中机构能与升降机构和枕板连接。居中机构能在升降机构高度发生变化时保持枕板处于两个升降机构的中间位置;居中机构能在升降机构上升/下降时保持枕板中心到两个升降机构的第一连杆上的任一点的距离同步增加或减小;即居中机构能在两个升降机构与居中机构连接点之间的距离发生变化时保持枕板中心到所述两个连接点之间的距离同步变化,即同时增大/减小,变化数值相同。所述连接点包括升降机构的铰链,尤其是升降机构与居中机构连接的铰链,包括上铰链。居中机构能在升降机构的上铰链之间的水平距离发生变化时保持枕板中心到两个上铰链之间的距离同步变化,即同时增大/减小。
7.所述居中机构包括至少一横杆,所述横杆能绕一轴转动,所述轴固连于枕板;所述居中机构包括至少二连杆,所述连杆的一端与横杆的端部铰接,另一端与升降机构连接。所述居中机构包括至少一齿轮和至少二齿条;所述齿轮能绕一轴转动,轴与枕板连接,轴垂直于枕板;二个齿条的一端分别从齿轮的两侧与齿轮啮合;二个齿条的另一端分别与滑块固连,滑块能沿固定在枕板上的滑轨滑动;滑块与升降机构连接。
8.包括至少一动力源,包括至少一柔性机械运动传递机构,柔性机械运动传递机构包括柔性机械运动传递部件,柔性机械运动传递机构能改变形状以适应输入端与输出端的空间位置的改变,能传递扭矩和/或拉力;动力源与升降机构间通过柔性机械运动传递机构连接,柔性机械运动传递机构能把动力源产生的动力传递到升降机构,以驱动升降机构改变高度。柔性机械运动传递机构包括至少一线管拉线组件。柔性机械运动传递机构包括至少一软轴。柔性机械运动传递机构包括至少一柔性液压管路系统和至少一液压动作筒和/或液力马达;动力源包括至少一液压泵;液压动作筒和/或液力马达能与升降机构连接,能
驱动升降机构运动;液压管路系统能把液压泵输出的高压液体传输到液压动作筒和/或液力马达以驱动升降机构。
9.包括至少一增力机构,增力机构能放大力和/或扭矩;增力机构能布置在柔性机械运动传递机构与升降机构之间,能把柔性机械运动传递机构传递来的力和/或扭矩放大以驱动升降机构。增力机构包括至少一杠杆。增力机构包括至少一滑轮。增力机构包括至少一齿轮。
10.枕头的升降机构包括至少一第一连杆,第一连杆包括至少一上铰链,至少一中铰链,至少一下铰链;第一连杆的下铰链能与布置在底板上沿底板滑动的滑块连接,上铰链能与枕板或居中机构或连接于枕板的连杆连接;上铰链转动中心在中铰链转动中心与下铰链转动中心间直线连线的下侧,即靠近底板一侧。上铰链、中铰链、下铰链的转动中心不在一条直线上。上铰链、中铰链间的连线与中铰链、下铰链间的连线存在一个大于0度的夹角;优选夹角大于5/10/15/20度。当升降机构处于最低高度时,上铰链中心不高于过中铰链中心的水平面20mm,优选不高于10mm,优选与该水平面在同一高度或低于该水平面。
11.升降机构的第一连杆包括至少一上铰链,至少一中铰链,至少一下铰链,及至少一位于中铰链与上铰链之间的第四铰链;升降机构包括至少一第二连杆组件,第二连杆组件包括至少一上连杆、至少一下连杆,上连杆的一端与第一连杆的中铰链连接,另一端与下连杆铰接,下连杆的另一端与底板或固连在底板上的支座铰接;升降机构包括至少一第三连杆组件,第三连杆组件包括至少一上连杆、至少一下连杆,上连杆的一端与第一连杆的第四铰链连接,另一端与下连杆铰接,下连杆的另一端与底板或固连在底板上的支座铰接;优选第三连杆组件的上连杆长度短于第二连杆组件的上连杆,优选短10mm以上。
12.升降机构包括至少一第二连杆组件,第二连杆组包括至少二根连杆,第二连杆组的一端与第一连杆的中铰链连接,另一端与底板连接;包括至少一第三连杆组件,第三连杆组包括至少二根连杆,第三连杆组的一端与第一连杆的第四铰链连接,另一端与底板连接。
13.升降机构的第二连杆组件包括至少二根连杆,第二连杆组件的一端与第一连杆的中铰链连接,另一端与底板连接;第三连杆组包括至少二根连杆,第三连杆组件的一端与第一连杆的第四铰链连接,另一端与底板连接。
14.升降机构与柔性机械运动传递机构连接,柔性机械运动传递机构与动力源连接。升降机构能通过增力机构与柔性机械运动传递机构连接。柔性机械运动传递机构能传递扭矩或拉力,能传递转动或线性位移;能弯曲/弯折改变形状/位置,能把空间位置不固定的动力源与升降机构/增力机构连接起来并传递动力。柔性机械运动传递机构把动力源的扭矩/拉力传递到升降机构或增力机构,使升降机构发生位移/转动,改变升降机构的高度,从而改变枕头的高度。
15.升降机构能包括连杆机构;包括推杆机构;包括螺杆升降机构;包括齿条升降机构。动力源能产生动力,能产生扭矩/拉力,能产生转动/位移运动。动力源能包括电动机/液压/气压动力装置。增力机构能包括杠杆机构/滑轮组/齿轮组/皮带轮组/螺杆机构,增力机构能放大输入的力/扭矩并输出。
16.动力源布置在枕板和底板之间区域以外的位置,动力源不在枕头本体内,不与枕板或底板刚性连接/固定链接,不与升降机构或增力机构刚性连接/固定链接。
17.本发明的枕头因为采用了新型的连杆结构和升降驱动方式,所以最低高度能降到
非常低。
附图说明
18.图1是本发明枕头一个实施例的示意图;图2是本发明枕头一个实施例的示意图;图3是本发明枕头一个实施例的示意图;图4是图3中枕头的居中机构示意图;图5是本发明枕头一个实施例的示意图;图6是本发明枕头一个实施例的示意图;图7是图6中枕头的居中机构示意图;图8是本发明枕头的升降机构实施例示意图;图9是图8中升降机构支撑连杆转换临界状态示意图;图10是图8中升降机构支撑连杆转换后状态示意图;图11是本发明枕头的增力机构一个实施例示意图;图12是本发明枕头的增力机构一个实施例示意图;图13是本发明枕头的增力机构一个实施例示意图;附图中相同的编号代表相同或相近的组成部分。
具体实施方式
19.图1中,包含软性填充材料的枕垫6布置在刚性/半刚性托板7上,头能枕在枕垫上。托板7布置在枕板1上方,托板与枕板间能布置压力传感器8。枕板1和底板2间布置有二个升降机构,左右对称布置。枕板和底板为刚性/半刚性。升降机构包括第一连杆30、第二连杆31、滑块25、滑轨21、滑轨支座22、铰链33、34、35、36。支座22固定在底板上,支撑滑轨21。滑块25能沿滑轨左右滑动。滑块25与弹簧39连接,39能向底板中间拉动滑块,使升降机构高度降低。连杆30的一端布置有下铰链34,30通过34与滑块25铰接。连杆30 的另一端布置有上铰链33,30通过33与枕板1铰接。连杆30的中间布置有中铰链35,第一连杆30通过铰链35与第二连杆31的上端铰接。连杆31的下端通过铰链36与固连在底板上的支座26铰接。
20.动力源5包括至少一卷扬轮58,58能在电动机的带动下旋转。升降机构与动力源通过柔性机械运动传递机构连接。柔性机械运动传递机构包括至少一线管拉线组件。线管拉线组件是公知技术,如自行车闸线、变速线。线管拉线组件包括柔性拉线51和柔性中空线管52,拉线穿在线管中能够沿线管滑动。线管拉线组件是柔性的,能够弯曲。使用时,固定线管的两端,拉动拉线以带动连在拉线上的部件移动。线管拉线组件能够传递拉力,拉线运动时线管能保持形状位置不变。动力源中布置有限位块57,底板上布置有限位块27,线管52的一端固定在限位块57上,另一端固定在限位块27上,拉线51从限位块中间的孔穿过。拉线51一端与滑块25连接,另一端缠绕在卷扬轮58上。卷扬轮能够带动拉线移动。当卷扬轮向缠绕拉线方向转动时,能够拉紧拉线,带动滑块25向限位块 27运动,铰链34向铰链36移动,连杆30的上铰链端升起,枕板1升起;当卷扬轮向放松拉线方向转动时,释放拉线,滑块25在弹簧的拉力下向远离限位块 27方向运动,铰链34远离铰链36,连杆30的上铰链端下降,枕头高度降低;当卷扬轮停止转动时,拉线绷紧,连杆30停止运动。当人的头枕在枕垫6上时,头的重
量会使升降机构下落,和弹簧一起绷紧拉线。左右二个升降机构分别与二个线管拉线组件、二个卷扬轮连接,能彼此独立升降。
21.要升高枕垫时,电动机带动卷扬轮转动,缠绕拉线,拉线带动滑块沿滑轨移动,第一连杆升高,带动枕垫上升。要降低枕垫时,卷扬轮反向转动放松拉线,拉线对滑块的拉力消失,滑块在弹簧和/或头部重量作用下沿滑轨反向移动,第一连杆降低,枕板下降。动力源能包括推杆电机,拉线与推杆电机的推杆连接,推杆能拉动/放松拉线。
22.图2中,枕板上部布置有枕垫6。枕板1和底板2之间布置有两个左右对称的升降机构。升降机构包括第一连杆30、第二连杆31、丝杠组件、支座、铰链。丝杠组件包括丝杠28、螺母滑块29和限制螺母滑块转动的滑轨,丝杠转动时,螺母滑块能沿丝杠移动。丝杠组件把丝杠的转动转换为螺母滑块的直线位移。第一连杆的上端通过上铰链33与枕板铰接,下端通过下铰链34与螺母滑块29 铰接。中铰链35的中心位于33与34中心连线的中点。第二连杆31的上端与中铰链35铰接,下端通过铰链36与基座26铰接。33到35、35到34、35到36 的长度相同,34和36在同一水平面,33和36在同一竖直面。
23.动力源5包括电机59。柔性机械运动传递机构包括至少一软轴。软轴,也叫万向软轴,是公知技术。软轴是柔性的,能弯曲。软轴包括柔性轴芯和柔性轴套,轴芯穿在轴套中并能在其中转动而轴套不转动,且能保持轴套的形状/位置不变,软轴能传递转动/扭矩。轴套56布置在限位块57和限位块27之间,轴芯55的一端与电机59连接,另一端与丝杠28连接。电机转动时,旋转运动通过软轴传递到丝杠组件,丝杆28旋转,带动螺母滑块29和铰链34沿丝杠移动以驱动第一连杆升降,进而带动升降机构升降。
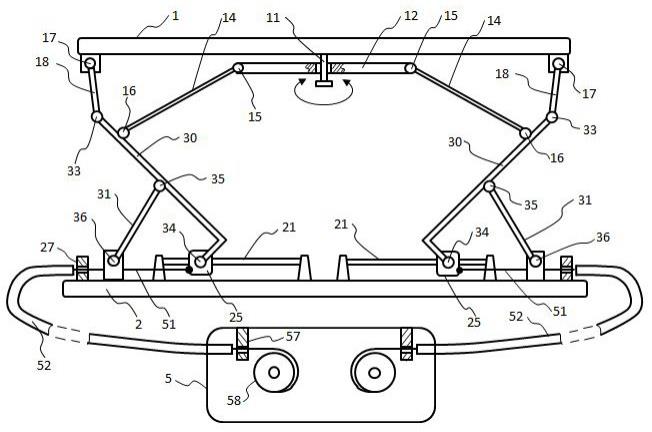
24.图3中,枕板1、底板2间布置有两个独立的升降机构。升降机构包括第一连杆30、第二连杆31、光轴滑轨21、滑块25、铰链、支座、回位弹簧。动力源5包括二个电机带动的摆臂53。拉线51与滑块25连接,摆臂53与拉线51 连接,能拉紧/放松拉线以带动滑块移动。能在每个滑块的左右两侧各连接一条拉线,一条拉线能拉动滑块向左移动,另一条拉线能拉动滑块向右移动。升降机构的上升、下降由滑块左右两侧的拉线分别控制。
25.第一连杆30的侧面形态非直线,为l形,第一连杆30的上铰链33、中铰链35、下铰链34的转动轴线即转动中心不在一条直线上,上铰链转动中心在中铰链转动中心与下铰链转动中心直线连线的下侧即偏向底板一侧。图3中的虚线为过中铰链35和下铰链34中心的直线连线,上铰链33中心在该连线下方。即中铰链中心在上铰链中心与下铰链中心连线的上侧即靠近枕板一侧。优选中铰链中心与上铰链中心的连线平行于滑轨。左侧升降机构的中铰链中心与上铰链中心的连线平行于右侧升降机构的中铰链中心与上铰链中心的连线,优选上述四个中心在同一直线上。
26.33与35、35与34、35与36之间的距离能够相同,也能不同。当升降机构升高,第一连杆30的上铰链33上升时,33的运动轨迹不是竖直的直线,而是弧线。即使左右两侧的升降机构同步升降,左右两个上铰链33之间的水平距离也是随上铰链高度的改变而在不断变化的。左右两侧的升降机构能不同步升降,此时枕板倾斜,左右两个上铰链之间的距离随枕板倾斜角度的变化而改变。
27.枕板1固连至少两个支座19,支座19上布置有铰链17。左右两侧的上铰链33与铰链17间分别连接有刚性连杆18。当左右两个上铰链33之间的距离发生变化时,连杆18能在上铰链33和铰链17之间摆动,以调和左右两个上铰链33间距离和左右两个铰链17间距离的不
同。枕板1与升降机构间布置有居中机构,居中机构能保持枕板的中心点到左右两个上铰链的距离同步变化,即同步增加或减小。居中机构能保持枕板所在平面与过左右两个上铰链的平面之间的夹角保持不变,优选始终保持平行。当枕板、居中机构、升降机构分别左右对称时,居中机构能保持枕板的中心线始终与左右两个上铰链中心连线的中垂线重合,即居中机构能保持枕板始终与左右两个上铰链中心连线平行且枕板中垂线到左右两个上铰链中心距离相等。
28.居中机构包括中心轴11、横杆12、连杆14、铰链15、铰链16、连杆18。中心轴11的轴线垂直枕板。横杆12的中心有一轴孔,11穿过该轴孔。横杆12 能在与枕板平行的平面内转动。12的两端各布置有铰链15,两个铰链15到12 的中心距离相等。左右两个第一连杆30上分别布置有铰链16,16能布置在第一连杆上的任意位置。铰链15、16优选球头铰链/鱼眼铰链。铰链15、16间布置有连杆14,连杆14把横杆12与第一连杆30连接起来。左右连杆14等长。当升降机构上升/下降时,两个铰链16间的距离将随着发生改变。铰链16牵拉连杆14带动横杆12转动,此时中心轴11始终处于两个铰链16连线的中点。
29.图4是图3中居中机构的仰视图。横杆12能绕中心轴11在与上板1平行的平面内转动。连杆14通过铰链15与横杆12连接,通过铰链16与第一连杆 30连接。两个铰链15、两个连杆14、两个铰链16分别绕中心轴11旋转对称。左右两侧布置有4个连杆18,右侧的两个连杆18通过上铰链33与右侧第一连杆30连接,通过铰链17与枕板1右侧的两个支座19连接。连杆18、升降机构左右对称布置。当升降机构高度改变时,第一连杆在竖直和水平方向上都发生位移,两个铰链16间的水平距离改变,16到中心轴11的距离改变。升降机构上升时,第一连杆30向远离中心轴11的方向移动,带动铰链16、连杆14向左右两侧移动,进而带动横杆12顺时针转动。升降机构下降时,第一连杆30向靠近中心轴11的方向运动,带动铰链16、连杆14向中间移动,进而带动横杆12逆时针转动。上述过程中,中心轴11到两个铰链16间的距离同步增大/减小,中心轴始终处与两个铰链16间的连线垂直中分处,枕板1不能任意左右移动,枕板始终处于两个铰链16的中间位置。不论两个第一连杆30怎样运动,枕板中心始终居于两个上铰链33的中间位置,居中机构起到了居中的作用。
30.图5中,左右两个卷扬轮58转动,缠绕拉线51,拉线51拉动滑块25沿滑轨21分别向底板两侧滑动。铰链34向铰链36靠近,铰链35、33升高,第一连杆30和第二连杆31从接近水平状态变化为接近竖直状态。左右两侧的铰链 16在竖直方向上升高,在水平方向上相互远离,铰链16与枕板1间的距离增加。连杆12水平旋转,连杆14在水平和竖直两个方向旋转。两个上铰链33间的水平距离增加,带动连杆18绕铰链17摆动。在居中机构作用下,枕板中心线始终处于两个第一连杆上铰链连线中间点的位置。
31.图6中,居中机构包括中心轴11、齿轮107、齿条106、滑块105、滑轨 103、支座101。中心轴固连在枕板1上,齿轮绕中心轴转动。两个齿条106旋转对称布置在齿轮107两侧。齿条106与滑块105固连,105能沿滑轨103滑动。
32.升降机构包括第一连杆30、第二连杆31、铰链、滑块25、滑轨21。连杆30通过上铰链33与滑块105铰接。连杆30非直线,33与35连线、35与34 的连线不在一条直线上。优选在升降机构高度最低时,中铰链35水平高度高于上铰链33,即33到底板的距离小于35到底板的距离。这样居中机构的部分结构能布置在中铰链35水平面以下,进一步降低枕头的最小高度。两个滑块25 共用滑轨21。两个滑块105共用滑轨103。枕头升高时,两个滑块25分别向滑
轨两端移动,铰链34向铰链36靠近,铰链33、35升高,同时两个铰链33的水平距离也发生改变,铰链33带动滑块105沿滑轨103滑动。滑块105带动齿条 106移动,齿条106带动齿轮107转动。
33.图7是图6中居中机构的仰视图。当左右两个升降机构的第一连杆30产生水平位移时,上铰链33带动滑块105沿滑轨103相向/相背移动,105带动齿条106移动。滑块105相互远离时,齿轮107绕中心轴11逆时针转动,中心轴11到左右两个滑块105、铰链33的距离同步增加,始终相等,枕板始终居于左右铰链33的中间位置。滑块105相互靠近时,齿轮107顺时针转动,枕板中心到两侧铰链33的距离同步减小。
34.图8中,升降机构包括一第一连杆30。第一连杆30上端连接有上铰链 33,下端连接有下铰链34,中间部位连接有中铰链35,在中铰链35与上铰链 33之间连接有至少一第四铰链351。30的通过下铰链34与滑块25连接,通过上铰链33与枕板/居中机构连接。升降机构包括至少一第二连杆组件和至少一第三连杆组件。第二连杆组件包括上连杆31、下连杆312、连接31与312的铰链 36、固连在底板2上的支座260、连接312与260的铰链362、限位块262。第三连杆组件包括上连杆311、下连杆313、连接311与313的铰链361、固连在底板上的支座261、连接313和261的铰链363、限位块263。上连杆31通过中铰链35与第一连杆30铰接,上连杆311通过第四铰链351与第一连杆30铰接。当连杆30处于最低位置时,铰链361紧贴限位块263而不能移动,铰链36悬浮在限位块262上方。此时,连杆30以连杆311为支撑,351为支点。作用在滑块25上的驱动力是沿滑轨21的水平力,该力到351的力臂是351到铰链34的竖直距离。枕面传递给连杆30的力作用于上铰链33,其竖直分力的力臂是上铰链33到第四铰链351的水平距离。第四铰链351比中铰链35更靠近上铰链33,所以该力臂小于33到35的水平距离,因此作用在33上的压力产生的阻碍33 上升的力矩要小于图3、6中的情况。滑块向右运动,第一连杆的上铰链33向右上方升起,铰链351绕铰链361顺时针转动,铰链36绕铰链362顺时针转动, 36向限位块262移动。
35.图9是图8中升降机构运动到第二连杆组和第三连杆组转换的临界情况。随着第一连杆30的升起,铰链36接触到限位块262而不能继续移动,此时铰链 361仍然与限位块263接触。接下来第一连杆30将以连杆31为支撑而上升。
36.图10是图9中第一连杆继续升高的情况。第一连杆30以连杆31为支撑继续升高,铰链33沿新轨迹上升,铰链36停止不动,铰链35绕铰链36转动,此时情况相当于图3、6中的情况。作用在33的竖直分力的力臂是33到35的水平距离,35是支点。作用在铰链34上的水平力的力臂是34到35的竖直距离。随着铰链351的升高,351带动连杆311、313上升,铰链361脱离限位块263。
37.图8到10中升降机构升降时存在一个支撑连杆和支点转换的过程,在第一连杆处于最低位置时,第一连杆的支点为第四铰链351,靠近上铰链33,此时作用在33上的压力产生的阻力矩较小,30升起时所需的水平拉力较小。当第一连杆升起到超过临界角度后,第一连杆的支点转换为铰链35,35离33远,铰链 34在水平方向上很小的位移就能在33端产生较大的上升位移。上述结构降低了驱动升降机构上升所需的峰值拉力/扭矩,有利于降低枕头结构重量。能够采用多于2个连杆组件来进一步降低峰值拉力/扭矩。
38.图11中,增力机构包括至少一杠杆205。杠杆205的一端通过铰链203 与基座200连接,基座固连在底板2,杠杆能绕203在平行于底板的平面内摆动。杠杆的另一端布置有圆弧
结构206,拉线51绕过206连接在205上。线管52固定在限位块27上。滑轨21通过支座22固定在底板上。滑块25能沿21滑动。拉簧39的一端连接滑块25,另一端与支座391连接,391固定在底板上。连杆 207的一端通过铰链208与杠杆205连接,另一端通过铰链209与滑块25连接。当拉线51拉紧时,带动杠杆205转动,205通过207拉动滑块25移动,进而带动升降机构上升。拉线51放松时,拉簧39能把滑块25拉回原位。拉线51的力臂大于连杆207的力臂,使作用在滑块上的拉力大于拉线上的拉力,实现了增力。
39.图12中,增力机构包括至少一滑轮211。滑轮211的轮轴与滑块25连接,拉线51经滑轮211与固连在底板上的锚块212连接。拉线51拉紧时,滑轮向右侧移动,带动滑块25向右侧移动,并通过铰链34带动连杆30升起。滑轮使拉线上的拉力放大2倍,实现了增力。增力机构能包括滑轮组,滑轮组包括至少一定滑轮和至少一动滑轮。
40.图13中,增力机构包括至少一齿轮,优选齿轮组。丝杠28能转动并带动螺母滑块29沿28移动,进而带动铰链34、第一连杆30运动,滑轨21能限制29的转动和滑移方向。轴套56被限位块27固定。增力机构包括齿轮227、 225、223、221。软轴55与齿轮227连接,能带动227转动。齿轮227与齿轮 225啮合。齿轮225与齿轮223同轴固连。齿轮223与齿轮221啮合,221与丝杠28固连。软轴传递的扭矩经过齿轮组227、225、223、221放大后驱动丝杠 28转动,起到扭矩放大、增力的作用。
41.枕板与底板间能前后布置两个升降机构,并能异步升降,使枕板在颈侧与远离颈侧方向上发生倾斜,以改变仰卧时头的俯仰角度。枕板与底板间能布置三个升降机构,每个升降机构与枕板通过球形铰链连接,并能异步升降,使枕板能在空间中以任意方向倾斜。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1