清洁机器人基站、清洁机器人以及清洁机器人系统的制作方法
1.本技术涉及清洁设备技术领域,具体而言,涉及一种清洁机器人基站、清洁机器人以及清洁机器人系统。
背景技术:
2.随着技术的不断发展,目前清洁机器人广泛地被应用,例如,扫地机器人被应用于人们的生活当中,扫地机器人能够实现自动扫地、吸尘以及拖地等功能,扫地机器人在执行拖地功能后,通常会回到扫地机器人基站将污水排出,但是由于现有扫地机器人基站的结构限制,污水回收效率不高,而且污水容易流出至地面。
技术实现要素:
3.本技术实施例提出了一种清洁机器人基站、清洁机器人以及清洁机器人系统,以解决以上问题。
4.本技术实施例通过以下技术方案来实现上述目的。
5.第一方面,本技术实施例提供一种清洁机器人基站,适配于清洁机器人,清洁机器人包括污水回收装置,污水回收装置设有排污口,清洁机器人基站包括基站箱体,基站箱体设有污水槽,污水槽用于收集清洁机器人的污水,污水回收组件包括水箱、回收动力件、连通管以及对接机构,水箱设有污水腔,对接机构设有用于与排污口连通的吸污口,水箱通过连通管与污水槽以及吸污口连通,回收动力件用于将污水槽和排污口回收至污水腔内。
6.第二方面,本技术实施例还提供一种清洁机器人,适配于第一方面提供的清洁机器人基站,清洁机器人包括污水回收装置,污水回收装置包括排污口,排污口用于与对接机构进行连通。
7.第三方面,本技术实施例还提供一种清洁机器人系统,清洁机器人系统包括第一方面提供的清洁机器人基站和第二方面提供的清洁机器人。
8.相较于现有技术,本技术提供的清洁机器人基站,通过将清洁机器人基站中的对接机构直接与清洁机器人的排污口直接对接,无需待清洁机器人将内部的污水排出后再进行回收,回收动力件可以产生吸力,加快清洁机器人内污水的流出速度,污水槽可以对清洁机器人的污水进行收集,例如污水槽可以收集在对清洁机器人进行冲洗时产生的污水,以及收集对接机构与排污口在对接或分离时流出的污水,有效地保证清洁机器人在排污时或者在对清洁机器人冲洗时,从清洁机器人上下来的污水不会外溢至地面,污水回收组件可以直接对清洁机器人内的污水以及污水槽内的污水进行回收。
附图说明
9.为了更清楚地说明本技术实施例中的技术方案,下面将对实施例描述中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本技术的一些实施例,对于本领域技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他的附
图。
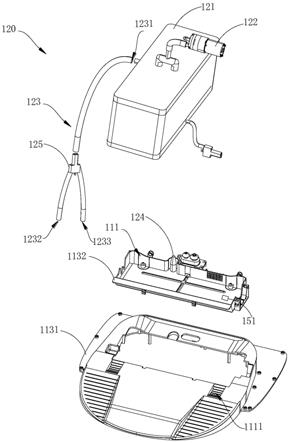
10.图1是本技术实施例提供的清洁机器人基站在拆分状态下的结构示意图。
11.图2是如图1所示的清洁机器人基站的污水回收组件、底座在拆分状态下的结构示意图。
12.图3是如图2所示的清洁机器人基站的容纳壳、对接机构在拆分状态下的结构示意图。
13.图4是如图2所述的清洁机器人基站的污水回收组件中的水箱、回收动力件以及排水组件在组装状态下的剖面图。
14.图5是本技术实施例提供的清洁机器人在组装状态下的结构示意图。
15.图6是如图5所示的清洁机器人的剖面图。
16.图7是本技术实施例提供的清洁机器人系统的结构示意图。
具体实施方式
17.为了使本技术领域的人员更好地理解本技术方案,下面将结合本技术实施例中的附图,对本技术实施例中的技术方案进行清楚、完整地描述。显然,所描述的实施例仅仅是本技术一部分实施例,而不是全部的实施例。基于本技术中的实施例,本领域技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本技术保护的范围。
18.请参阅图1,本技术实施例提供一种清洁机器人基站100,适配于清洁机器人,清洁机器人包括污水回收装置,污水回收装置设有排污口,清洁机器人基站100包括基站箱体110以及污水回收组件120,基站箱体110设有污水槽111。
19.如图2和图3所示,污水回收组件120包括水箱121、回收动力件122、连通管123以及对接机构124,水箱121设置于基站箱体110,水箱121设有污水腔1214(如图4所示),对接机构124设有用于与排污口连通的吸污口1243,水箱121通过连通管123与污水槽111以及吸污口1243连通,回收动力件122用于将污水槽111和排污口内的污水回收至污水腔1214内。污水槽111用于收集清洁机器人的污水,其中“清洁机器人的污水”可以是对清洁机器人进行清洁时产生的污水、对接机构124与清洁机器人的排污口在对接或分离时流出的污水以及清洁机器人自身排出的污水。
20.本技术提供的清洁机器人基站100,通过将清洁机器人基站中的对接机构直接与清洁机器人的排污口直接对接,无需待清洁机器人将内部的污水全部排出后再进行回收,回收动力件122可以产生吸力,加快清洁机器人内污水的流出速度,污水槽可以对清洁机器人的污水进行收集,例如污水槽可以收集在对清洁机器人进行冲洗时产生的污水,以及收集对接机构与排污口在对接或分离时流出的污水,有效地保证清洁机器人在排污时或者在对清洁机器人冲洗时,从清洁机器人上下来的污水不会外溢至地面,污水回收组件可以直接对清洁机器人内的污水以及污水槽内的污水进行回收。
21.请一并参阅图1和图2,在本实施例中,基站箱体110可以包括外壳112以及底座113,外壳112设有收容空间1121,以用于收纳清洁机器人。底座113设置于收容空间1121内,底座113与外壳112可以为一体结构或者可拆卸式结构。在本实施例中,污水槽111位于底座113,具有地,底座113包括底壳1131以及容纳壳1132,污水槽111位于容纳壳1132。污水槽111的槽口形状、尺寸可以与清洁机器人的拖布机构的形状和尺寸相适配。容纳壳1132可拆
卸地设置于底壳1131,便于用户将容纳壳1132从底壳1131拆卸下来进行清洗。
22.在一些实施方式中,底座113可以设有定位槽1111,定位槽1111与清洁机器人的车轮适配,其可以用于定位车轮,以在清洁机器人回到收容空间1121内时,车轮可以落于定位槽1111内,实现清洁机器人的准确定位,以保证定位机构124与定位槽1111准确地对接。
23.在本实施例中,连通管123可以为三通管,连通管123具有第一连通口1231、第二连通口1232以及第三连通口1233,第一连通口1231连通污水腔1214,第二连通口1232连通吸污口1243,第三连通口1233连通污水槽111,清洁机器人基站100还包括切换机构125,切换机构125用于选择性地接通第一连通口1231与第二连通口1232,或者接通第一连通口1231与第三连通口1233。具体地,切换机构125可以为电磁阀,电磁阀可选择性地将第一连通口1231与第二连通口1232连通,以使污水腔1214与吸污口1243连通,或者选择性地将第一连通口1231与第三连通口1233连通,以使得污水腔1214与污水槽111的连通。在第一连通口1231与第二连通口1232连通时,第一连通口1231与第三连通口1233未连通;在第一连通口1231与第三连通口1233连通时,第一连通口1231与第二连通口1232未连通。
24.在本实施例中,清洁机器人基站100包括控制模块150,控制模块150与回收动力件122以及切换机构125电连接,以用于控制回收动力件122以及切换机构125的工作状态,例如控制回收动力件122的开/关以及工作速率,控制切换机构125选择性地接通对应的连通口。控制模块150可以控制切换机构125在接通第一连通口1231与第二连通口1232时,而第一连通口1231与第三连通口1233未连通;在接通第一连通口1231与第三连通口1233时,而第一连通口1231与第二连通口1232未连通,这样真空泵1221在工作时,可以使第二连通口1232产生抽吸力,避免污水腔1214因通过第三连通口1233与外界连通而无法使得污水腔1214产生足够的负压,或使第三连通口1233产生抽吸力,避免污水腔1214因通过第二连通口1232与外界连通而无法使得污水腔1214产生足够的负压。
25.在本实施例中,水箱121可以设置于基站箱体110内,回收动力件122可以包括真空泵1221,真空泵1221与污水腔1214连通,以用于使污水箱121内产生负压。真空泵1221在工作时能够将污水腔1214内的空气抽出,使得污水腔1214内产生负压,从而使得第二连通口1232或者第三连通口1233产生抽吸力,这样能够将清洁机器人内的污水或者污水槽111内的污水直接抽吸至污水腔1214内,这样污水不需要通过真空泵1221,有效地避免真空泵1221被堵塞的问题。真空泵1221需对清洁机器人进行抽污水作业时,控制模块150可以控制切换机构125接通第一连通口1231与第二连通口1232,以对排污口的污水进行回收,或者切换机构125接通第一连通口1231与第三连通口1233,以对污水槽111内的污水进行回收。
26.在一些实施方式中,回收动力件122可以包括活动件以及驱动件,活动件将水箱121的腔体分隔为第一腔体以及第二腔体,其中第一腔体作为污水腔1214,第二腔体可以作为气腔,驱动件可以选择性地驱使活动件朝向第一腔体或者第二腔体运动。当驱动件驱动活动件朝向第二腔体运动时,污水腔1214内产生抽吸力,从而使得污水腔1214能够将清洁机器人内的污水或者污水槽111内的污水直接抽吸回收。此外,回收动力件122也可以是水泵。
27.在一些实施方式中,连通管123可以包括第一管体以及第二管体,回收动力件122可以包括第一泵体以及第二泵体,第一管体连通污水腔1214与吸污口1243,第一泵体连通第一管体,第二管体连通污水腔1214与污水槽111,第二泵体连通第二管体。第一泵体以及
第二泵体可以为水泵或者为真空泵,其中,第一泵体和第二泵体分别用于将污水槽111以及清洁机器人的排污口的污水回收至污水腔1214内。当第一泵体和第二泵体均为真空泵时,污水腔1214可以设有两个相互分隔的第一污水腔和第二污水腔,第一污水腔通过第一管体与吸污口1243连通,第二污水腔通过第二管体与污水槽111连通,第一泵体与第一污水腔连通,以使第一污水腔产生负压,第二泵体与第二污水腔连通,以使第二污水腔体产生负压。第一泵体以及第二泵体在工作时,两者可以互不干扰,两者可以同时对清洁机器人的污水以及污水槽111内的污水进行回收,有效地提高污水的效率。
28.此外,在一些实施方式中,第一管体与第二管体可以连通管体连接,连通管体设有阀门,阀门可以是电磁开关阀,阀门可以选择性地连通或者隔开第一管体与第二管体,当清洁机器人基站100的控制模块150检测到第一泵体和第二泵体中的一者无法工作时,控制模块150控制阀门连通第一管体和第二管体,例如,在第二泵体无法工作时,阀门连通第一管体和第二管体,这样第一泵体在工作时,第一泵体可以使得第一管体以及第二管体同时产生抽吸力,从而实现同时对清洁机器人的污水以及污水槽111内的污水进行回收。
29.请参阅图4,在本实施例中,水箱121设有与污水腔1214连通的抽气口1211,真空泵1221与抽气口1211连通,抽气口1211可以设置于水箱121的顶部,水箱121设有透气防水隔膜1212,透气防水隔膜1212封闭抽气口1211,其中“封闭”是指透气防水隔膜1212允许空气通过抽气口1211但不允许液体通过抽气口1211,这样在不影响真空泵1221正常工作的前提下,可以有效地避免污水腔1214内的液体进入真空泵1221内。作为一种示例,透气防水隔膜1212可以包括pp纺粘无纺布、pe高分子透气膜以及pp纺粘无纺布,其中,纺粘无纺布的作用主要是增强拉力和静水压及保护中间层(pe高分子透气膜),中间层pe高分子透气膜主要起到透气的作用。
30.请参阅图3,在本实施例中,对接机构124位于污水槽111内,这样对接机构124在与清洁机器人的排污口对接时,污水槽111位于排污口的下方,由于对接机构124与排污口之间可能会存有间隙,这样清洁机器人的污水容易从间隙流出,由于污水槽111正位于排污口的下方,因此,从间隙流出污水会直接流入污水槽111内,此外,对接机构124与排污口在对接和分离过程中也可能会漏出污水,这些污水会直接流入污水槽111内,从而有效地避免污水流在地面上。
31.请参阅图3,在本实施例中,对接机构124包括顶管1241以及弹性件1242,吸污口1243位于顶管1241,顶管1241可伸缩地设置于基站箱体110,具体地,顶管1241可以大致沿污水槽111的深度方向可伸缩地设置,顶管1241的接头端可以设有倒角结构,例如,接头端可以采用圆锥形结构,这样可以实现导向,便于顶管1241对准清洁机器人的排污口,并可顺利地插入排污口内。弹性件1242连接于顶管1241以用于向顶管1241提供插入排污口内的作用力。顶管1241通过管路结构与污水腔1214连通,回收动力件122在工作时能够使得顶管1241的吸污口1243产生抽吸力,从而将排污口内的污水快速地抽吸至污水腔1214内。清洁机器人可以包括封堵组件,封堵组件可伸缩地设置于排污口并选择性地打开或者关闭排污口。当对接机构124与清洁机器人的排污口进行对接时,排污口与顶管1241对准后,顶管1241在弹性件1242的作用下将封堵组件顶退,以使封堵组件远离排污口,从而将排污口打开,顶管1241能够顺利地插入清洁机器人的排污口内并与排污口连通。因此,清洁机器人回到清洁机器人基站100进行排污作业,顶管1241能够快速地插入排污口内,回收动力件122
能够直接将清洁机器人内的污水回收至污水腔1214内,有效地提高污水的回收效率。
32.请再次参阅图2,在本实施例中,清洁机器人基站100还包括与控制模块150耦接的第一水检测件151,第一水检测件151设置于污水槽111内,第一水检测件151可以为电阻型液位传感器、浮子液位传感器、电容式液位传感器、光学液位传感器(利用光在两种不同介质界面会发生反射折射,且在液体里和空气中折射率不一致)以及压力水位传感器(利于水压测量的原理进行检测)等,控制模块150用于在第一水检测件151检测到污水槽111内存有有水时控制切换机构125接通第一连通口1231与第三连通口1233。第一水检测件151可以设置于污水槽111的槽底或者污水槽111的侧壁。当第一水检测件151检测到污水槽111内留存有污水时,第一水检测件151的电容、电压或者电流等参数发生改变,从而发出检测信号,控制模块150在接收到检测信号后,控制切换机构125接通第一连通口1231与第三连通口1233,并控制回收动力件122工作,以将污水槽111内的污水回收至污水腔1214内。
33.在一些应用环境中,当清洁机器人的排污口与对接机构124分离完成后,控制模块150用于在第一水检测件151检测到污水槽111内存留有水时,则控制切换机构125接通第一连通口1231与第三连通口1233,并控制回收动力件122工作,以对污水槽111内的污水进行回收。
34.此外,也可以不用设置第一水检测件151,当控制模块150在检测到清洁机器人离开清洁机器人基站时,可以控制切换机构125接通第一连通口1231与第三连通口1233,并控制回收动力件122预设时长,以将污水槽111内的污水回收至污水腔1214内。
35.在一些实施方式中,如图4所示,清洁机器人基站100还包括与控制模块150耦接的水位检测件152,水位检测件152设置于污水腔1214内,并邻近于基站箱体110的顶部设置或者设置于基站箱体110的顶部,控制模块150还用于在接收到水位检测件152的污水腔1214体内的水位上述至预设水位时控制回收动力件122停止工作。通过在污水腔1214内设置水位检测件152,便于检测污水腔1214内的水位高度,当清洁机器人基站100的污水腔1214内的水满时,控制模块150可以控制回收动力件122停止工作。控制模块150可以控制回收动力件122停止工作,并可以通过通讯模块(蓝牙或wi
‑
fi模块)提醒用户污水腔1214内水满,便于用户及时地将污水排出。
36.此外,在一些实施方式中,清洁机器人基站100还可以包括排水组件160,排水组件160可以包括泵体以及排污管,排污管连通污水腔1214与外部的排污管道,例如,排污管连通污水腔1214与外部的地漏,泵体用于将污水腔1214内的污水排出,在污水腔1214的水满后,控制模块150可以控制泵体工作,及时地将污水腔1214内的污水自动排出。
37.在一些应用环境中,水位检测件152在检测到污水腔1214内的水上升至预设水位时,例如,上升至水满时的最大水位时,或者上述至最大水位的2/3或2/3以上时,控制模块150增大排水组件160的工作功率,以使排水组件160的工作功率大于回收动力件122的工作功率,这样排水组件160排出污水的速率大于回收动力件122回收污水的速率,这样可以在保证对清洁机器人的污水进行抽吸的同时,保证清洁机器人基站100的污水腔1214内的污水不会溢出。
38.在一些实施方式中,如图3所示,清洁机器人基站100还包括与控制模块150耦接的第二水检测件152,第二水检测件152设置于吸污口1243内,控制模块150还用于在第二水检测件152在预设时间内未检测到水流信号时控制切换机构125阻断第一连通口1231与第二
连通口1232的连通,并控制回收动力件122停止工作。其中预设时间的计时的起始点可以是第二水检测件152开始检测到水流停止开始。第二水检测件152可以是电容或者电阻式水检测件。清洁机器人在回清洁机器人基站100后,清洁机器人基站100的污水回收组件120对清洁机器人内的污水进行回收,当第二水检测件152未检测到水流信号时,则确定清洁机器人内的污水基本已经排除干净,此时,控制模块150控制切换机构125阻断第一连通口1231与第二连通口1232的连通,并控制回收动力件122停止工作。
39.在一些实施方式中,也可以不用设置第二水检测件152,控制模块150可以控制回收动力件122按照预设的功率正常工作预设时间,在预设时间内,回收动力件122能够将清洁机器人内的污水全部回收完,其中预设时间可以按照整个清洁机器人存储污水的最大容量和回收动力件122回收污水的回收速率计算得到。此外,控制模块150也可以通过通讯模块与清洁机器人进行通讯,控制模块150在清洁机器人的水检测传感器检测到污水排除完后,则控制切换机构125阻断第一连通口1231与第二连通口1232的连通,并控制回收动力件122停止工作。
40.在一些实施方式中,清洁机器人基站100还可以包括冲洗装置以及烘干装置,其中冲洗装置可以包括冲洗件以及泵体,冲洗件的冲洗口朝向清洁机器人的拖布机构,泵体用于将清水通过冲洗口泵送至拖布机构上,从而对拖布进行清洗。烘干装置可以对拖布机构进行烘干作业,避免拖布滋生细菌和发臭。
41.请参阅图5和图6,本技术实施例还提供一种清洁机器人200,适配于上述的清洁机器人基站100,清洁机器人200包括移动底盘210以及污水回收装置220,污水回收装置220设有排污口221,排污口221用于与对接机构124的吸污口1243进行连通。
42.在本实施例中,污水回收装置220可以包括回收箱以及回收泵,排污口221可以设置于回收箱的底部。清洁机器人200还包括拖布组件221以及刮污组件222,刮污组件222包括与污水腔1214连通的污水盒2222、刮污件2223以及封闭件2221,在本实施例中,污水盒2222通过管路结构与回收箱连通,回收泵用于将污水盒2222内的污水回收至回收箱内。刮污件2223用于将拖布组件221的污水收集至污水盒2222内,污水盒2222还设有用于与污水槽111连通的出污口,封闭件2221可选择性地打开或者关闭出污口。封闭件2221可以包括驱动器以及封闭堵头,驱动器可驱动封闭堵头选择性地打开或者关闭出污口,出污口可以设置于污水盒的底部。
43.示例性地,如图6所示,拖布组件221可以包括驱动部以及拖布2211,其中拖布2211套设于驱动部的外周,驱动部可以包括并排设置的驱动辊轮2221以及转动辊轮2222,拖布2211套设于驱动辊轮2221以及转动辊轮2222外并处于张紧状态,拖布2211在张紧状态下可大致呈椭圆状,拖布2211的下表面在张紧作用下至少部分为平面,这样可以增大拖布2211与地面的接触面积,增强洁地效果,刮污件2223可以大致为板状结构,并位于拖布2211的一侧,刮污件2223的设置方向可以与拖布2211的转动轴线大致平行,其中,刮污件2223可以相对于拖布2211的平面倾斜设置,并与拖布2211之间存有一定的干涉量,但不阻碍拖布的正常转动,拖布2211上的污水可以在刮污件2223的作用下顺沿着刮污件2223流入污水盒2222内。
44.此外,清洁机器人200还可以包括清水出水机构(图未示),清水出水机构的出水口朝向拖布2211,以用于向拖布2211施加清水,这样清洁机器人200在对地面清洁过程中可以
不断地对拖布2211进行湿润。
45.清洁机器人200在回到清洁机器人基站100后,清洁机器人200的排污口221与对接机构124对接,使得排污口221与对接机构124的吸污口1243连通,控制模块150控制切换机构125接通第一连通口1231和第二连通口1232,并启动回收动力件122工作,以将排污口221内的污水回收至污水回收组件120的污水腔1214内。清洁机器人200的封闭件2221可以将出污口直接打开,这样污水盒2222内留存的污水可以直接流入清洁机器人基站100的污水槽111内,在此过程中,清洁机器人200可以控制驱动部带动拖布2211转动,清洁机器人200中的清水出水机构可以不断地向拖布2211施加清水,刮污件2223将拖布2211上的污水不断地刮除至污水盒2222内,通过刮污件2223对拖布2211上的污水不断地刮除,从而实现拖布2211的清洗,在清洗拖布2211过程中产生的水会直接流入污水盒2222内,并从污水盒2222的出污口直接流入污水槽111内,这样污水盒2222内的污水不需要被回收至回收箱内即可以直接排出至污水槽111内,因此,在对清洁机器人200清洗的同时产生的污水可以全部排出,待对拖布2211清洗第一预设时长后,清洁机器人200控制清水出水机构停止出水,其中,第一预设时长是将污水盒内的污水的浑浊度降低至预设浑浊度所需的时长,当污水盒内的污水的浑浊度降低至预设浑浊度时,表示流入污水盒2222内的污水较为干净,则确定拖布2211基本被冲洗干净,其中,污水的浑浊度可以通过光传感器进行检测,例如红外传感器的接收器所接收到发射器发出的光强度来表证,污水浑浊度越高,则接收器接收到的光强度越弱,在一些实施方式中,当光传感器获取到的光强度大于预设强度时,表明拖布已经被清洗干净,则控制清水出水机构停止出水。待对拖布2211清洗第一预设时长后,并可以控制拖布2211继续第二工作预设时长,以使刮污件2223将拖布上的水基本刮除,清洁机器人基站100控制回收动力件122工作第三预设时长,当设于污水槽111内的第一水检测件151未检测到污水槽111内留存有水,清洁机器人基站100控制回收动力件122停止工作。
46.采用上述的清洁机器人基站100,清洁机器人基站100可以同时对清洁机器人200的回收箱以及污水盒2222内的污水进行回收,极大地提高污水回收的效率,而且污水槽111可以将对接机构124与污水口之间流出的污水,以及对接机构124与污水口分离时从对接机构124以及污水口流出的污水进行回收,在将清洁机器人内的污水抽取完后,污水回收组件120控制切换机构125接通第一连通口1231和第三连通口1233,再将污水槽111内的污水回收至污水腔1214内,从而实现整个污水的回收。
47.请参阅图7,本技术实施例还提供一种清洁机器人系统400,清洁机器人系统400包括上述的清洁机器人基站100和上述的清洁机器人200。
48.本技术实施例提供的清洁机器人系统,通过设置上述的清洁机器人基站和清洁机器人,通过将清洁机器人基站中的对接机构直接与清洁机器人的排污口直接对接,无需待清洁机器人将内部的污水排出后再进行回收,回收动力件可以产生吸力,加快清洁机器人内污水的流出速度,污水槽可以对清洁机器人的污水进行收集,例如污水槽可以收集在对清洁机器人进行冲洗时产生的污水,以及收集对接机构与排污口在对接或分离时流出的污水,有效地保证清洁机器人在排污时或者在对清洁机器人冲洗时,从清洁机器人上下来的污水不会外溢至地面,污水回收组件可以直接对清洁机器人内的污水以及污水槽内的污水进行回收。
49.以上实施例仅用以说明本技术的技术方案,而非对其限制;尽管参照前述实施例
对本技术进行了详细的说明,本领域的普通技术人员应当理解:其依然可以对前述各实施例所记载的技术方案进行修改,或者对其中部分技术特征进行等同替换;而这些修改或者替换,并不使相应技术方案的本质脱离本技术各实施例技术方案的精神和范围,均应包含在本技术的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1