一种流水线式智能炒菜机器人的制作方法
1.本发明涉及炒菜机器人技术领域,具体为一种流水线式智能炒菜机器人。
背景技术:
2.随着科技的不断发展,大量自动化设备不断涌入人们的日常生活中,尤其是现代的快节奏生活,使得人们既希望获得美味可口的美食,又希望美食的烹饪过程简单便捷,在这种情况下,以自动炒菜机为代表的自动烹饪设备(炒菜机器人)应运而生。
3.现如今市场上的炒菜机器人种类越来越多,但这些炒菜机器人大多只能实现自动翻炒,然而取菜和菜肴的取餐操作均需要人工进行,自动化程度还不够高,难以完成取菜、配菜、烹饪菜肴、菜肴取餐等一系列生产操作;另外,这些炒菜机器人内部的炒菜机构在结构设计存在一些缺陷,难以有效、全面地翻炒菜品,翻炒不到的部位容易出现粘锅现象,降低了菜肴口感。
技术实现要素:
4.本发明的目的在于提供一种流水线式智能炒菜机器人,以解决上述背景技术中提出的问题。
5.为实现上述目的,本发明提供如下技术方案:
6.一种流水线式智能炒菜机器人,包括炒菜机构,所述炒菜机构包括炒菜机架、自动锅盖机构、炒锅以及电磁炉,炒菜机架上安装有多个电磁炉,电磁炉上放置有炒锅,炒菜机架上对应每个炒锅均安装有自动锅盖机构,炒菜机架上对应每个炒锅还安装有一组用于向炒锅内导入调料的调料导管;
7.所述自动锅盖机构包括固定安装在炒菜机架上的底部支座、摆臂、锅铲组件以及锅盖,锅铲组件包括弹性导管、主锅铲片以及辅助锅铲片,所述底部支座上铰接安装有摆臂,摆臂自由端安装有行星减速器,行星减速器的下端固定安装有锅盖,行星减速器的上端固定安装有炒菜电机,炒菜电机的输出端与行星减速器的输入端驱动连接,行星减速器的输出端驱动连接有穿过锅盖中心的弹性导管,弹性导管端部固定安装有固定接头,固定接头下端插装固定有锅铲柱,锅铲柱的下端通过销轴与锅铲连接杆的中部转动配合连接,锅铲连接杆的两端弯折延伸有锅铲固定部,锅铲固定部固定连接有主锅铲片,所述弹性导管的下端侧壁固定连接有锅铲辅助架杆,锅铲辅助架杆的自由端固定安装有辅助锅铲片;
8.所述炒菜机架上还安装有用于驱动摆臂摆动的摆臂驱动机构。
9.作为本发明进一步的方案,所述摆臂驱动机构包括安装在炒菜机架内的摆臂驱动电机以及固定在炒菜机架上的减速器固定架,减速器固定架上固定安装有摆臂减速器,摆臂减速器的输入端与摆臂驱动电机的输出端驱动连接,摆臂减速器的输出端驱动连接有主动带轮,所述摆臂端部固定连接有铰接轴,铰接轴与底部支座转动配合连接,铰接轴上固定安装有从动带轮,从动带轮与主动带轮之间套装有传动带。
10.作为本发明进一步的方案,所述底部支座外壁上还固定安装有接近开关,所述摆
臂下端外壁固定安装有用于触发接近开关的行程限位板。
11.作为本发明进一步的方案,所述炒锅的前后两端固定安装有炒锅定位座,炒锅定位座的左右侧壁上开设有定位销槽,所述炒菜机架的后端对应每个炒锅还固定安装有竖向伸缩气缸,竖向伸缩气缸的顶部伸缩端固定连接有定位座板,定位座板上固定连接有用于插入定位销槽内的定位柱。
12.作为本发明进一步的方案,还包括炒菜机构前后方分别设置的取餐移栽机构和配菜移栽机构,取餐移栽机构包括底部取餐横移旋转驱动机构、取餐座板以及取餐翻转抓取机构,所述底部取餐横移旋转驱动机构的驱动端固定连接有取餐座板,所述取餐翻转抓取机构包括底部固定安装在取餐座板上的竖向取餐直线电机模组、纵向取餐直线电机模组、取餐旋转气缸以及炒锅抓取气缸,所述竖向取餐直线电机模组的竖向取餐滑动座板与纵向取餐直线电机模组的纵向取餐滑动座板固定连接,纵向取餐直线电机模组的端部固定安装有取餐旋转气缸,取餐旋转气缸的旋转端固定安装有用于托住炒锅定位座底部的l型托板,l型托板的竖直侧壁上延伸有一对托板插柱,所述炒锅定位座的侧壁上开设有用于与托板插柱配合的托板插槽,所述l型托板的上端还固定安装有炒锅抓取气缸,炒锅抓取气缸的底部伸缩端固定连接有炒锅抓取插销,所述炒锅定位座的顶壁上开设有用于与炒锅抓取插销配合的定位座顶部插槽;
13.所述配菜移栽机构包括底部配菜横移旋转驱动机构、配菜座板以及配菜翻转抓取机构,所述底部配菜横移旋转驱动机构的驱动端固定连接有配菜座板,所述配菜翻转抓取机构包括底部固定安装在配菜座板上的竖向配菜直线电机模组、纵向配菜直线电机模组、配菜旋转气缸以及菜料盒抓取气动夹爪,所述竖向配菜直线电机模组的竖向配菜滑动座板上固定安装有纵向配菜直线电机模组,纵向配菜直线电机模组的纵向配菜滑动座板上固定安装有配菜旋转气缸,配菜旋转气缸的旋转端固定安装有菜料盒抓取气动夹爪,菜料盒抓取气动夹爪的两个驱动端上固定安装有用于抓取菜料盒的菜料盒的菜料盒夹爪。
14.作为本发明进一步的方案,所述底部取餐横移旋转驱动机构和底部配菜横移旋转驱动机构采用相同结构的底部横移旋转驱动机构,底部横移旋转驱动机构包括底部机架、底部机架上固定安装有横移直线电机模组,横移直线电机模组的横移滑动座板上固定安装有底部旋转气缸,底部旋转气缸的旋转端与配菜座板或取餐座板固定连接。
15.作为本发明进一步的方案,所述横移直线电机模组的两侧还固定安装有滑动座板导向杆,所述横移滑动座板的两侧侧边转动安装有用于与滑动座板导向杆配合的横移导向滚轮;
16.所述配菜座板上还固定安装有接料盒。
17.作为本发明进一步的方案,还包括菜料盒供应和回收装置,菜料盒供应和回收装置包括菜料盒机架、位于上方的多个菜料盒供应机构以及位于下方的菜料盒回收机构,所述菜料盒供应机构和菜料盒回收机构采用相同的导向运送机构,导向运送机构包括上部横梁型材、高度位置低于上部横梁型材的下部横梁型材、多组用于对菜料盒左右侧壁导向的导向光杆以及多组用于支撑菜料盒的流利条组件,导向光杆的两端分别与上部横梁型材、下部横梁型材固定连接,流利条组件的两端也分别与上部横梁型材、下部横梁型材固定连接;
18.所述菜料盒供应机构的上部横梁型材固定在菜料盒机架背部,菜料盒供应机构的
下部横梁型材固定在菜料盒机架前部;
19.所述菜料盒回收机构的下部横梁型材固定在菜料盒机架背部,菜料盒回收机构的上部横梁型材固定在菜料盒机架前部。
20.作为本发明进一步的方案,所述导向光杆的两端分别通过光杆固定座与上部横梁型材、下部横梁型材固定连接;
21.所述流利条组件包括流利槽板和流利槽板上转动装的多个滚柱,滚柱沿着流利槽板的长度方向分布布置,流利槽板的两端分别与上部横梁型材、下部横梁型材固定连接;
22.所述下部横梁型材上方对应每组流利条组件还固定安装有多个挡盒座板,挡盒座板的内侧壁固定安装有橡胶阻挡块。
23.作为本发明进一步的方案,所述菜料盒机架上还固定安装有托盒横梁型材,托盒横梁型材位于菜料盒回收机构的前部下方,托盒横梁型材对应每组流利条组件还固定安装有多个托盒气缸,托盒气缸的伸缩端穿过两根流利条组件之间的空间,并固定连接有托盒座板;
24.所述托盒座板的后侧还延伸有用于对菜料盒限位的限位挡边。
25.与现有技术相比,本发明的有益效果是:本发明的结构设计合理,通过依次设置的菜料盒供应和回收装置、配菜移栽机构、炒菜机构以及取餐移栽机构的配合,能够完成取菜、配菜、烹饪菜肴、菜肴取餐等一系列操作,实现菜肴烹饪的流水线自动化生产,生产加工效率高;
26.锅铲组件采用弹性导管作为驱动部件,一方面,弹性导管能够传递扭矩,带动主锅铲片和辅助锅铲片运动,进行翻炒,另一方面,弹性导管能够提供一定的弹力,锅铲连接杆两端的主锅铲片在弹力作用下能够同时与炒锅内壁抵压接触,在旋转过程中,配合辅助锅铲片,能够有效翻炒菜品,避免出现菜品粘锅的现象出现。
附图说明
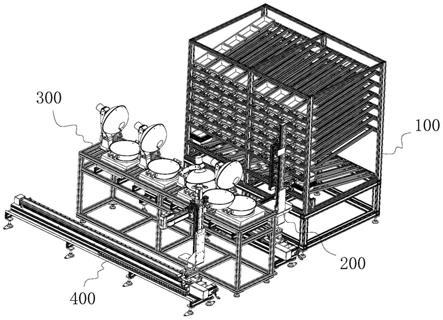
27.图1为一种流水线式智能炒菜机器人的立体结构示意图;
28.图2为一种流水线式智能炒菜机器人的右视结构示意图;
29.图3为一种流水线式智能炒菜机器人中炒菜机构的立体结构示意图;
30.图4为一种流水线式智能炒菜机器人中炒菜机构的右视结构示意图;
31.图5为一种流水线式智能炒菜机器人中自动锅盖机构的立体结构示意图;
32.图6为一种流水线式智能炒菜机器人中自动锅盖机构的剖面结构示意图;
33.图7为一种流水线式智能炒菜机器人中取餐移栽机构的立体结构示意图;
34.图8为一种流水线式智能炒菜机器人中取餐移栽机构j处放大的结构示意图;
35.图9为一种流水线式智能炒菜机器人中取餐移栽机构上部的局部结构示意图;
36.图10为一种流水线式智能炒菜机器人中配菜移栽机构的立体结构示意图;
37.图11为一种流水线式智能炒菜机器人中菜料盒供应和回收装置的正面立体结构示意图;
38.图12为一种流水线式智能炒菜机器人中菜料盒供应和回收装置中a处放大的结构示意图;
39.图13为一种流水线式智能炒菜机器人中菜料盒供应和回收装置右侧面的结构示
意图;
40.图14为一种流水线式智能炒菜机器人中菜料盒供应和回收装置中c处放大的结构示意图。
41.图中:100-菜料盒供应和回收装置,1-菜料盒机架,11-菜料盒,12-菜料盒供应机构,13-菜料盒回收机构,131-上部横梁型材,132-下部横梁型材,133-导向光杆,1331-光杆固定座,134-流利条组件,1341-流利槽板,1342-滚柱,135-挡盒座板,1351-橡胶阻挡块,14-托盒气缸,141-托盒横梁型材,142-托盒座板;
42.200-配菜移栽机构,21-配菜座板,22-,23-竖向配菜直线电机模组,231-竖向配菜滑动座板,24-纵向配菜直线电机模组,241-纵向配菜滑动座板,25-配菜旋转气缸,26-菜料盒抓取气动夹爪,27-菜料盒夹爪;
43.300-炒菜机构,31-炒菜机架,32-电磁炉,33-竖向伸缩气缸,34-定位座板,35-定位柱,36-调料导管,37-锅铲组件,371-弹性导管,372-主锅铲片,3721-锅铲连接杆,373-辅助锅铲片,3731-锅铲辅助架杆,374-锅铲柱,3741-固定接头,375-炒菜电机,376-行星减速器,38-摆臂驱动机构,381-底部支座,382-摆臂,383-减速器固定架,384-摆臂减速器,385-摆臂驱动电机,386-主动带轮,387-传动带,388-从动带轮,389-铰接轴,39-接近开关,391-行程限位板;
44.400-取餐移栽机构,41-底部机架,42-横移直线电机模组,421-滑动座板导向杆,43-横移滑动座板,431-横移导向滚轮,44-底部旋转气缸,45-取餐座板,46-竖向取餐直线电机模组,461-竖向取餐滑动座板,47-纵向取餐直线电机模组,471-纵向取餐滑动座板,48-取餐旋转气缸,481-l型托板,482-托板插柱,49-炒锅抓取气缸;
45.500-炒锅,501-炒锅定位座,502-定位座顶部插槽,503-托板插槽,504-定位销槽,600-锅盖。
具体实施方式
46.下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
47.请参阅图1~14,一种流水线式智能炒菜机器人,包括炒菜机构300,所述炒菜机构300包括炒菜机架31、自动锅盖机构、炒锅500以及电磁炉32,炒菜机架31上安装有多个电磁炉32,电磁炉32上放置有炒锅500,炒菜机架31上对应每个炒锅500均安装有自动锅盖机构,炒菜机架300上对应每个炒锅500还安装有一组用于向炒锅500内导入调料的调料导管36;通过调料导管36可向炒锅500导入油、盐水、酱油等等辅助调料。
48.请参阅图5~6,所述自动锅盖机构包括固定安装在炒菜机架31上的底部支座381、摆臂382、锅铲组件37以及锅盖600,锅铲组件37包括弹性导管371、主锅铲片372以及辅助锅铲片373,所述底部支座381上铰接安装有摆臂382,摆臂382自由端安装有行星减速器376,行星减速器376的下端固定安装有锅盖600,行星减速器376的上端固定安装有炒菜电机375,炒菜电机375的输出端与行星减速器376的输入端驱动连接,行星减速器376的输出端驱动连接有穿过锅盖600中心的弹性导管371,弹性导管371端部固定安装有固定接头3741,
固定接头3741下端插装固定有锅铲柱374,锅铲柱374的下端通过销轴与锅铲连接杆3721的中部转动配合连接,锅铲连接杆3721的两端弯折延伸有锅铲固定部,锅铲固定部固定连接有主锅铲片372,所述弹性导管371的下端侧壁固定连接有锅铲辅助架杆3731,锅铲辅助架杆3731的自由端固定安装有辅助锅铲片373;
49.所述炒菜机架31上还安装有用于驱动摆臂382摆动的摆臂驱动机构38。
50.在本实施例中,炒菜电机375通过行星减速器376驱动弹性导管371转动,旋转的弹性导管371即可带动锅铲柱374、锅铲连接杆3721、主锅铲片372、锅铲辅助架杆3731以及辅助锅铲片373运动,通过主锅铲片372和辅助锅铲片373的配合,能够对炒锅500内部进行全面彻底翻炒。
51.锅铲组件37采用弹性导管371作为驱动部件,一方面,弹性导管371能够传递扭矩,带动主锅铲片372和辅助锅铲片373运动,进行翻炒,另一方面,弹性导管371能够提供一定的弹力,当锅盖600和炒锅500盖合后,弹性导管371能够抵压锅铲柱374和锅铲连接杆3721,又由于锅铲连接杆3721能够相对锅铲柱374相对摆动,因此,锅铲连接杆3721两端的主锅铲片372在弹力作用下能够同时与炒锅500内壁抵压接触,在旋转过程中,配合辅助锅铲片373,能够有效翻炒菜品,避免出现菜品粘锅的现象出现。
52.其中,请参阅图5~6,所述摆臂驱动机构38包括安装在炒菜机架31内的摆臂驱动电机385以及固定在炒菜机架31上的减速器固定架383,减速器固定架383上固定安装有摆臂减速器384,摆臂减速器384的输入端与摆臂驱动电机385的输出端驱动连接,摆臂减速器384的输出端驱动连接有主动带轮386,所述摆臂382端部固定连接有铰接轴389,铰接轴389与底部支座381转动配合连接,铰接轴389上固定安装有从动带轮388,从动带轮388与主动带轮386之间套装有传动带387。
53.锅盖600的打开或盖合原理:摆臂驱动电机385通过摆臂减速器384依次带动主动带轮386、传动带387、从动带轮388、铰接轴389运动,转动的铰接轴389即可带动摆臂382围绕底部支座381摆动,从而实现锅盖600的打开或盖合。
54.作为进一步优选方案,所述底部支座381外壁上还固定安装有接近开关39,所述摆臂382下端外壁固定安装有用于触发接近开关39的行程限位板391。当摆臂382驱动锅盖600完全打开后,行程限位板391触碰接近开关39,接近开关39将信号发送至控制器,控制器控制摆臂驱动电机385停止运行。
55.其中,请参阅图7~9,所述炒锅500的前后两端固定安装有炒锅定位座501,炒锅定位座501的左右侧壁上开设有定位销槽504,所述炒菜机架31的后端对应每个炒锅500还固定安装有竖向伸缩气缸33,竖向伸缩气缸33的顶部伸缩端固定连接有定位座板34,定位座板34上固定连接有用于插入定位销槽504内的定位柱35。
56.在进入炒菜过程之前,竖向伸缩气缸33驱动定位座板34,使得定位座板34上的定位柱35插入炒锅定位座501的定位销槽504中,从而实现对炒锅500的限位固定,确保锅铲组件37在翻炒过程中炒锅500的平稳。
57.本实施例还包括炒菜机构300前后方分别设置的取餐移栽机构400和配菜移栽机构200,请参阅图7~9,取餐移栽机构400包括底部取餐横移旋转驱动机构、取餐座板45以及取餐翻转抓取机构,所述底部取餐横移旋转驱动机构的驱动端固定连接有取餐座板45,所述取餐翻转抓取机构包括底部固定安装在取餐座板45上的竖向取餐直线电机模组46、纵向
取餐直线电机模组47、取餐旋转气缸48以及炒锅抓取气缸49,所述竖向取餐直线电机模组46的竖向取餐滑动座板461与纵向取餐直线电机模组47的纵向取餐滑动座板471固定连接,纵向取餐直线电机模组47的端部固定安装有取餐旋转气缸48,取餐旋转气缸48的旋转端固定安装有用于托住炒锅定位座501底部的l型托板481,l型托板481的竖直侧壁上延伸有一对托板插柱482,所述炒锅定位座501的侧壁上开设有用于与托板插柱4482配合的托板插槽503,所述l型托板481的上端还固定安装有炒锅抓取气缸49,炒锅抓取气缸49的底部伸缩端固定连接有炒锅抓取插销,所述炒锅定位座501的顶壁上开设有用于与炒锅抓取插销配合的定位座顶部插槽502;
58.通过竖向取餐直线电机模组46可以实现l型托板481和炒锅抓取气缸49的升降,通过纵向取餐直线电机模组47可以实现l型托板481和炒锅抓取气缸49的前后纵向移动,当炒菜完成,锅盖600完全打开后,利用竖向取餐直线电机模组46和纵向取餐直线电机模组47的配合,使得l型托板481移动到炒锅500的炒锅定位座501底部,同时托板插柱482插入到托板插槽503中,炒锅抓取气缸49驱动炒锅抓取插销,插入到定位座顶部插槽502内,即可实现炒锅500的抓取,然后,竖向伸缩气缸33驱动定位座板34的定位柱35脱离炒锅定位座501的定位销槽504,即可解除炒锅500的锁定;接着,即可炒锅500取出,利用取餐旋转气缸48的动作,即可实现炒锅500的翻转,实现炒好菜品的倒出。
59.请参阅图10,所述配菜移栽机构200包括底部配菜横移旋转驱动机构、配菜座板21以及配菜翻转抓取机构,所述底部配菜横移旋转驱动机构的驱动端固定连接有配菜座板21,所述配菜翻转抓取机构包括底部固定安装在配菜座板21上的竖向配菜直线电机模组23、纵向配菜直线电机模组24、配菜旋转气缸25以及菜料盒抓取气动夹爪26,所述竖向配菜直线电机模组23的竖向配菜滑动座板231上固定安装有纵向配菜直线电机模组24,纵向配菜直线电机模组24的纵向配菜滑动座板241上固定安装有配菜旋转气缸25,配菜旋转气缸25的旋转端固定安装有菜料盒抓取气动夹爪26,菜料盒抓取气动夹爪26的两个驱动端上固定安装有用于抓取菜料盒的菜料盒11的菜料盒夹爪27。
60.通过竖向配菜直线电机模组23可以实现菜料盒抓取气动夹爪26的升降,通过纵向配菜直线电机模组24可以实现菜料盒抓取气动夹爪26的前后纵向移动,需要取菜配菜时,利用竖向配菜直线电机模组23和纵向配菜直线电机模组24的配合,使得菜料盒夹爪27靠近菜料盒11的两侧侧壁,然后,菜料盒抓取气动夹爪26动作,使得菜料盒夹爪27夹住菜料盒11,即可实现菜料盒11的抓取,再利用竖向配菜直线电机模组23和纵向配菜直线电机模组24的配合,将菜料盒11运送至炒锅500上方,通过配菜旋转气缸25旋转驱动,即可翻转菜料盒11,将菜料盒11中的配菜倒入炒锅500中。
61.其中,请参阅图7~8,所述底部取餐横移旋转驱动机构和底部配菜横移旋转驱动机构采用相同结构的底部横移旋转驱动机构,底部横移旋转驱动机构包括底部机架41、底部机架41上固定安装有横移直线电机模组42,横移直线电机模组42的横移滑动座板43上固定安装有底部旋转气缸44,底部旋转气缸44的旋转端与配菜座板21或取餐座板45固定连接。
62.在本实施例中,由于炒菜机架31上安装有多个电磁炉32,每个电磁炉32上均放置有炒锅500,通过横移直线电机模组42和底部旋转气缸44可以带动配菜翻转抓取机构或取餐翻转抓取机构移动至对应的炒锅500位置处,实现不同炒锅50工位的配菜和取餐操作。
63.可优选地,请参阅图8,所述横移直线电机模组42的两侧还固定安装有滑动座板导向杆421,所述横移滑动座板43的两侧侧边转动安装有用于与滑动座板导向杆421配合的横移导向滚轮431;结构设计更合理,确保配菜翻转抓取机构或取餐翻转抓取机构能够在横移直线电机模组42平稳地进行横移动作。
64.所述配菜座板21上还固定安装有接料盒22,接料盒22方便收集倾到配菜时掉落的菜屑。
65.请参阅图11~14,本实施例还包括菜料盒供应和回收装置100,菜料盒供应和回收装置100包括菜料盒机架1、位于上方的多个菜料盒供应机构12以及位于下方的菜料盒回收机构13,所述菜料盒供应机构12和菜料盒回收机构13采用相同的导向运送机构,导向运送机构包括上部横梁型材131、高度位置低于上部横梁型材131的下部横梁型材132、多组用于对菜料盒11左右侧壁导向的导向光杆133以及多组用于支撑菜料盒11的流利条组件134,导向光杆133的两端分别与上部横梁型材131、下部横梁型材132固定连接,流利条组件134的两端也分别与上部横梁型材131、下部横梁型材132固定连接;
66.在本实施例中,菜料盒供应机构12从上至下设置有多层,每层的菜料盒供应机构12设置有多个用于运送菜料盒11的运送导向通道,该运送导向通道由一组的导向光杆133和一组流利条组件134组成。
67.所述菜料盒供应机构12的上部横梁型材131固定在菜料盒机架1背部,菜料盒供应机构13的下部横梁型材132固定在菜料盒机架1前部;
68.所述菜料盒回收机构13的下部横梁型材132固定在菜料盒机架1背部,菜料盒回收机构13的上部横梁型材131固定在菜料盒机架1前部。
69.所述导向光杆133的两端分别通过光杆固定座1331与上部横梁型材131、下部横梁型材132固定连接;
70.所述流利条组件134包括流利槽板1341和流利槽板1341上转动装的多个滚柱1342,滚柱1342沿着流利槽板1341的长度方向分布布置,流利槽板1341的两端分别与上部横梁型材131、下部横梁型材132固定连接;
71.所述下部横梁型材132上方对应每组流利条组件134还固定安装有多个挡盒座板135,挡盒座板135的内侧壁固定安装有橡胶阻挡块1351。通过橡胶阻挡块1351对菜料盒11进行限位,避免菜料盒11冲出运送导向通道。
72.在使用时,将切好的菜品分别放入对应的菜料盒11中,在菜料盒机架1背面,将菜料盒11放置到对应的菜料盒供应机构12上端,菜料盒11底部与流利条组件134接触,每组的两根导向光杆133对菜料盒11的左右侧壁进行限位导向,在重力作用下,菜料盒11即可沿着流利条组件134向下滑动,最终达到下部横梁型材132位置处,便于配菜移栽机构200进行取菜、配菜;
73.配菜移栽机构200取菜、配菜完成后,将空的菜料盒11放置在菜料盒回收机构13的上端,同样地,空的菜料盒11也可沿着菜料盒回收机构13的流利条组件134向下滑动,最终达到菜料盒回收机构13的下部横梁型材132位置处,便于回收清洗。
74.所述菜料盒机架1上还固定安装有托盒横梁型材141,托盒横梁型材141位于菜料盒回收机构13的前部下方,托盒横梁型材141对应每组流利条组件134还固定安装有多个托盒气缸14,托盒气缸14的伸缩端穿过两根流利条组件134之间的空间,并固定连接有托盒座
板142;
75.在配菜移栽机构200取菜、配菜完成后,配菜移栽机构200可先将空的菜料盒11叠放在托盒座板142上,当菜料盒11叠放数量达到设定个数后,托盒气缸14收缩,驱动托盒座板142下降,使得菜料盒11底面落到菜料盒回收机构13的流利条组件134上,叠放后的菜料盒11即可沿着菜料盒回收机构13的流利条组件134向下滑动,最终达到菜料盒回收机构13的下部横梁型材132位置处,便于集中回收处理。
76.所述托盒座板142的后侧还延伸有用于对菜料盒11限位的限位挡边。确保菜料盒11能够平稳地叠放在托盒座板142上。
77.在本发明中,术语如“上”、“下”、“左”、“右”、“前”、“后”、“竖直”、“水平”、“侧”、“底”等指示的方位或位置关系为基于附图所示的方位或位置关系,只是为了便于叙述本发明各部件或元件结构关系而确定的关系词,并非特指本发明中任一部件或元件,不能理解为对本发明的限制。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1