固体调料添加装置的制作方法
1.本发明涉及烹饪自动化技术领域,尤其涉及一种固体调料添加装置。
背景技术:
2.目前,随着自动化技术的发展,自动化烹饪产品在食堂、餐厅、快餐店、家庭生活等的厨房中得到了应用。现有的自动化烹饪产品主要有:炒菜机器人、调料添加机器人等。众所周知,调料的添加对于菜品的口味具有至关重要的影响。因此,针对如何实现调料添加机器人调料的精确、定量出料,有必要提出进一步地解决方案。
技术实现要素:
3.本发明旨在提供一种固体调料添加装置,以克服现有技术中存在的不足。
4.为解决上述技术问题,本发明的技术方案是:
5.一种固体调料添加装置,其包括:出料驱动机构、行程控制机构以及固体调料存放机构;
6.所述固体调料存放机构包括:壳体以及出料单元;
7.所述壳体内部中空设置,且所述壳体内部被一隔板分隔为上下两个空间,所述隔板的上部空间形成固体调料的存放空间;
8.所述出料单元包括至少一个料盒;所述料盒抽拉地设置于所述壳体的下部空间中,且所述料盒的尾端自所在的下部空间中伸出;所述料盒具有若干上下贯通设置的料槽,若干料槽按照料盒的抽拉方向间隔排布;所述隔板上开设有与所述料槽对应设置出料口;
9.所述出料驱动机构包括:拉杆以及动力结构;所述拉杆一端能够与所述料盒的伸出端相配合,另一端与所述动力结构传动连接;
10.所述行程控制机构包括:第二激光传感器以及格栅尺;所述格栅尺位于拉杆的一侧,其具有沿所述拉杆直线运动方向紧密排列的若干栅条;所述第二激光传感器由所述动力结构带动随所述拉杆进行同步运动;所述第二激光传感器具有一槽口,该槽口中形成对射光路,所述第二激光传感器的槽口延伸至格栅尺的若干栅条处。
11.作为本发明固体调料添加装置的改进,所述固体调料存放机构还包括搅拌单元,其包括:搅拌棒、搅拌杆以及齿轮组;
12.所述齿轮组包括:主动齿轮和从动齿轮;
13.所述主动齿轮和从动齿轮枢转连接于所述壳体的顶部,且二者相互啮合;所述从动齿轮的齿轮轴的下端形成传动连接端,该传动连接端延伸至所述壳体的上部空间中,并与所述搅拌棒的上端传动连接;所述搅拌棒的下端与所述隔板上设置的芯轴枢转连接;所述搅拌杆为多根,多根搅拌杆活动地横向插接于所述搅拌棒中,且所述多根搅拌杆自上而下间隔排列。
14.作为本发明固体调料添加装置的改进,任一根搅拌杆的端部还设置有一尺寸大于所述搅拌杆直径的凸起部。
15.作为本发明固体调料添加装置的改进,所述搅拌单元还包括保持架,其包括:外框架和内轴套;
16.所述外框架的四角分别通过螺栓锁附于壳体内侧,所述内轴套位于外框架的内侧,该内轴套通过连接筋条与外框架连接为一体;且所述内轴套还套装于所述搅拌棒的上部。
17.作为本发明固体调料添加装置的改进,所述搅拌单元还包括搅拌叶片;
18.所述搅拌叶片包括:至少两个叶片本体以及连接各叶片本体的套环,所述搅拌叶片通过其套环安装于所述搅拌棒的下端。
19.作为本发明固体调料添加装置的改进,所述出料驱动机构还包括第一激光传感器;
20.所述第一激光传感器安装于所述拉杆上,并靠近所述拉杆的一端设置;所述第一激光传感器具有一槽口,该槽口中形成对射光路;所述料盒的尾端设置有能够与所述第一激光传感器的槽口相配合的挡块。
21.作为本发明固体调料添加装置的改进,所述动力结构包括:步进电机、减速机、第一传动轮、第二传动轮、第三传动轮以及传动带;
22.所述第三传动轮位于第一传动轮和第二传动轮之间的上方,且三个传动轮之间通过所述传动带进行联动;所述步进电机经减速机与第三传动轮传动连接,所述拉杆与第一、二传动轮之间的传动带相连接。
23.作为本发明固体调料添加装置的改进,所述步进电机及减速机整体通过一连接板调节地安装于一机座上;
24.所述机座上还设置有腰形调节孔和调节槽;所述连接板通过穿过所述腰形调节孔的螺栓锁附于机座上,且所述连接板上的滑块能够在沿所述连接板上下调节的同时,沿所述调节槽进行导向滑动。
25.作为本发明固体调料添加装置的改进,所述出料驱动机构还包括:滑块和导轨;所述滑轨沿所述拉杆的直线运动方向布置于所述拉杆的一侧,所述拉杆通过所述滑块与传动带相连接,且所述滑块同时能够沿滑轨进行滑动。
26.作为本发明固体调料添加装置的改进,所述行程控制机构还包括:挡片和位置感应开关;
27.所述位置感应开关沿所述拉杆的运动方向分前、中、后三个位置,分置于所述拉杆的一侧;所述中间的位置感应开关对应拉杆的原点位置,前部的位置感应开关对应拉杆前进的极限位置,后部的位置感应开关对应拉杆后退的极限位置;所述挡片与位置感应开关相配合,二者相对设置时,所述位置感应开关能够感应挡片所在的位置,所述挡片由所述动力结构带动随所述拉杆进行同步运动。
28.与现有技术相比,本发明的有益效果是:本发明的固体调料添加装置通过设置激光传感器和格栅尺,对拉杆的位移进行精确控制,进而相应控制能够与拉杆相配合的料盒的位移,实现固体调料的精确出料。
附图说明
29.为了更清楚地说明本发明实施例或现有技术中的技术方案,下面将对实施例或现
有技术描述中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本发明中记载的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他的附图。
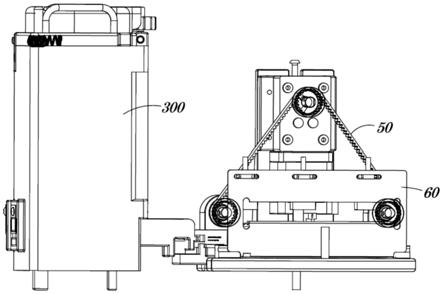
30.图1为本发明调料添加系统一实施例的结构示意图;
31.图2为图1中固体调料存放机构的立体示意图;
32.图3为图2中壳体的立体示意图;
33.图4为图2所示固体调料存放机构去掉壳体的立体分解示意图;
34.图5为图4中搅拌单元的立体分解示意图;
35.图6为图2中出料单元的立体示意图;
36.图7为图1中出料驱动机构及行程控制机构的立体示意图;
37.图8为图1中行程控制机构的立体示意图。
具体实施方式
38.下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
39.如图1所示,本发明一实施例提供一种调料添加系统,其包括:出料驱动机构50、行程控制机构60以及固体调料存放机构300。
40.如图2所示,固体调料存放机构300用于存放固体形态的调料,例如:糖、盐、味精、淀粉等。固体调料存放机构300可设置于一底盘的相应连接位上,并可随该底盘的枢转进行同步运动。
41.固体调料存放机构300包括:壳体30、搅拌单元31以及出料单元32。
42.配合参照图3所示,壳体30内部中空设置,且壳体30内部被一隔板301分隔为上下两个空间。其中,隔板301的上部空间形成固体调料的存放空间,该存放空间顶部由一盖板33进行打开或者关闭。其中,盖板33枢转连接于壳体30顶部的边缘位置,且其形状与壳体30顶部的开口相对应,如此盖板33可通过枢转的方式打开或者关闭壳体30,以便于将固体调料放入壳体30的上部空间中。此外,该盖板33上还设置有适于操控盖板33枢转打开和关闭的把手330。
43.如图4所示,壳体30上还设置有锁附单元,其用于实现盖板33的锁定。该锁附单元包括:第一锁附组件34和第二锁附组件35。
44.第一锁附组件34用于对盖板33前端进行锁附,其设置于盖板33前端的底部。该第一锁附组件34包括:锁扣341以及设置于锁扣341与盖板33底部凸起之间的弹簧342。
45.相应的,壳体30上还设置有与锁扣341相配合的锁孔。在弹簧342的作用下,该锁扣341初始地插接于锁孔中。如此,当按压锁扣341时,其能够自锁孔中脱出,进而可实现盖板33的前端解锁。一个实施方式中,锁扣341为一u形结构,其一端自盖板33前端的通孔中伸出,另一端插接于锁孔中。其中,自通孔中伸出的部分形成锁扣341解锁时的按压部。
46.第二锁附组件35用于对盖板33的侧边进行锁附,其设置于盖板33的左侧或者右侧。该第二锁附组件35包括:插销351以及设置于插销351与盖板33底部凸起之间的弹簧
352。
47.插销351连接于盖板33顶部把手330延伸至壳体30中的端部。此时,弹簧352一端与盖板33底部凸起相抵靠,另一端套在插销351上并与把手330延伸至壳体30中的端部相抵靠。相应的,壳体30上还设置有与插销351相配合的插孔。在弹簧352的作用下,该插销351初始地插接于插孔中。如此,当通过把手330槽孔插销351自插孔中脱出时,可实现盖板33的侧面解锁。同时,盖板33顶部设置有适于把手330控制插销351进行解锁动作时的腰形孔。
48.为了便于壳体30安装于所在的连接位上,壳体30内侧通过四根连接柱36与底盘相连接。相应的,壳体30相对的两个侧内侧壁面上均设置有前后排布的两个装配腔。此时,连接柱36收容于各装配腔中,且其下端自装配腔中伸出并与底盘相连接。
49.如图5所示,搅拌单元31用于对上部空间中存放固定固体调料进行搅拌,以便于将固体调料打散而方便出料。该搅拌单元31包括:搅拌棒310、搅拌杆311、搅拌叶片312、保持架313以及齿轮组314。
50.齿轮组314包括:第一从动齿轮3140和第二从动齿轮3141。
51.其中,第一从动齿轮3140和第二从动齿轮3141枢转连接于盖板33的顶部,且二者相互啮合。同时,通过设置一驱动齿轮,其可与第一从动齿轮3140相啮合。驱动齿轮工作时,可带动与其传动连接的第一从动齿轮3140同步枢转。如此,第一从动齿轮3140可进一步带动第二从动齿轮3141进行旋转。
52.第二从动齿轮3141的齿轮轴的下端形成传动连接端,该传动连接端穿过顶盖并延伸至壳体30中。为了与搅拌棒310上端的型块进行传动连接,传动连接端的端面上还开设有能够与之配合的型槽31410。如此,第二从动齿轮3141旋转时,可带动搅拌棒310进行同步旋转。
53.同时,为了对第二从动齿轮3141进行径向的限位,其齿轮轴的上还套装有垫片315,且垫片315分布于盖板33的上下两侧。相应的,齿轮轴上还设置有适于垫片315套装的环形凹槽。此外,盖板33上还设置有一保护罩37,第一从动齿轮3140和第二从动齿轮3141收容于该保护罩37中,且第一从动齿轮3140至少部分地自保护罩37中伸出。
54.如上所述,第一从动齿轮3140和第二从动齿轮3141安装于盖板33上。如此,当盖板33打开时,第二从动齿轮3141可与搅拌杆311脱离传动连接。因此,为了盖板33扣合时,第二从动齿轮3141与搅拌棒310重新传动连接,第二从动齿轮3141的中心设置有六角调节孔31411,借助工具插入到该六角调节孔31411中,可控制该第二从动齿轮3141进行转动,进而校正该第二从动齿轮3141与搅拌棒310相配合。相应的,保护罩37上开设有露出上述六角调节孔31411的孔洞370。
55.保持架313用于搅拌棒310在壳体30中的固定,其包括:外框架3130和内轴套3131。其中,外框架的四角分别通过螺栓锁附于壳体30内部对应的连接柱上。内轴套3131位于外框架3130的内侧,该内轴套3131通过连接筋条3132与外框架3130连接为一体。同时,内轴套3131还套装于搅拌棒310的上部,以实现搅拌棒310在壳体30中的固定。保持架313的上下两侧还设置有与与其形状相对应的垫板。此外,搅拌棒310的下端与隔板301上设置的芯轴枢转连接,且该芯轴与内轴套3131保持同轴设置。如此,在齿轮组314的带动下,搅拌棒310可以自身轴向为枢轴进行自转。
56.搅拌杆311为多根,多根搅拌杆311活动地横向插接于搅拌棒310中,且多根搅拌杆
311自上而下间隔排列。相应的,搅拌棒310上开设有自上而下间隔排列的适于搅拌杆311插接的通孔。如此,搅拌棒310进行转动时,可带动其上多根搅拌杆311进行同步转动,进而将上部空间中存放的固体调料打散。同时,由于多根搅拌杆311活动设置,从而还可根据需要调节搅拌杆311穿过搅拌棒310的长度,以满足不用种类固体调料的搅拌需求。
57.进一步地,搅拌棒310上还开设有自上而下间隔排列的与通孔相邻设置的插销孔3100,任一通孔与一插销孔3100相连通。如此,可通过插销可将通孔中穿置的搅拌杆311锁紧固定,以便于实现贯穿长度调节之后搅拌杆311的固定。此外,任一根搅拌杆311的端部还设置有一尺寸大于搅拌杆311直径的凸起部3110。如此,任一根搅拌杆311与固体调料之间具有更大的接触面积,进而有利于充分将固体调料打散。且各搅拌杆311上的凸起部形状、尺寸相同或者不同。一个实施方式中,凸起部为设置于搅拌杆311端部的球体。
58.搅拌叶片312包括:至少两个叶片本体以及连接各叶片本体的套环。该搅拌叶片312通过其套环安装于搅拌棒310的下端,如此能够对存放于上部空间中固体调料的底部进行搅动、打散。为了实现搅拌叶片312与搅拌棒310之间的传动,套环的中间开设有多边形装配孔。
59.如图6所示,出料单元32用于控制上方固体调料的出料。该出料单元32包括:至少一个料盒320。料盒320抽拉地设置于壳体30的下部空间中,其可接收上部空间中存放的固体调料,并被拉出时携带接收的固体调料进行出料。相应的,壳体30的下部空间具有连通至外部的前后相对设置的开口。
60.其中,料盒320尾端自所在的下部空间中伸出。且料盒320具有若干上下贯通设置的料槽3200,若干料槽3200按照料盒320的抽拉方向间隔排布。如此,可根据需求固体调料的克数,控制料盒320拉出的距离使得相应数量的料槽3200进行漏料。例如,如一个料槽3200中可存放1g的固体调料,当需要3g固体调料时,可控制料盒320拉出的距离使得三个料槽3200露出,进而获得所需3g固体调料。
61.为了便于各料槽3200接收来自上部空间存放的固体调料,壳体30内部的隔板301上开设有出料口3010。当料盒320初始地位于壳体30下部空间中时,其上的料槽3200与隔板301上的出料口3010相对设置。如此,固体调料可通过出料口3010掉落于料槽3200中。此外,上述搅拌叶片312也便于通过对固体调料的搅拌,使固体调料掉落并填满下方的各料槽3200。
62.为了便于料盒320的抽拉动作,壳体30下部还设置有位于前后开口之间的滑道。该滑道包括:上滑道板321和下滑道板322。其中,上滑道板321安装于隔板301的底部,并具有与出料口3010相对设置的镂空区域。下滑道板322一端连接于壳体30上前开口的底部,另一端与隔板301底部伸出的凸起相连接。如此,上滑道板321和下滑道板322之间形成上述适于料盒320滑动的滑道。
63.为了进一步保证料盒320抽拉时的稳定性,料盒320的底部还连接有一导向滑轨3201,相应的,壳体30上还开设有与导向滑轨3201相配合的导向滑槽。如此,当料盒320沿上述滑道滑动时,其底部的导向滑轨3201同步沿导向滑槽进行导向。
64.如上所述,可根据需求固体调料的克数,控制相应数量的料槽3200进行漏料。当需要固体调料的克数较多时,可设置多个料盒320。一个实施方式中,料盒320为三个。此时,三个料盒320周向排列于所在壳体30的下部空间中,且相邻的料盒320之间夹角相等。从而,可
通过底盘带动固体调料存放机构300枢转,使相应的料盒320运动至下料位置。
65.如图7、8所示,出料驱动机构50通过带动固体调料存放机构300中料盒320的抽拉实现固体调料的放料。该出料驱动机构50包括:拉杆51、第一激光传感器52、步进电机53、减速机54、第一传动轮55、第二传动轮56、第三传动轮57以及传动带58。
66.其中,拉杆51一端设置有一凸块510,该凸块510能够与料盒伸出的尾端伸出的尾端相配合,进而便于控制料盒320的抽拉。从而,该拉杆51所在的位置定义下料位置。相应的,料盒320的尾端设置有一朝下设置的能够与凸块510相配合的卡口3202。拉杆51另一端与步进电机53、减速机54、第一传动轮55、第二传动轮56、第二传动轮56以及传动带58形成的动力结构传动连接,该动力结构能够带动拉杆51进行前进或者后退。
67.如此,当固体调料存放机构300随底盘的枢转,使得凸块510收容于相应料盒320尾端的卡口中时,传动结构带动拉杆51前进,可实现料盒320中固体调料的放料;传动结构带动拉杆51后退时,其带动拉杆51运动至初始位置。相应的,各料盒320上卡口3202分布于一圆形轨迹上,且拉杆51长度方向的延伸线通过该圆环形轨迹的圆心。同时,各料盒320位于下料位置时,其抽拉方向的延伸线能够与拉杆51重合。
68.第一激光传感器52安装于拉杆51的一端,并靠近拉杆51一端上的凸块510设置,其用于检测料盒320是否与拉杆51上的凸块510顺利配合,以及固体调料存放机构300上是否装配了料盒320。
69.该第一激光传感器52具有一槽口520,该槽口520中形成对射光路。相应的,各料盒320的尾端分别设置有一挡块3203。当固体调料存放机构300随底盘运动至下料位置时,如对射光路被阻挡,则表明调料存放装置上装配了料盒320,同时拉杆51上的凸块510与卡口3202顺利配合。如此,便于拉杆51进行后续动作。
70.如上所述,动力结构能够带动拉杆51进行前进或者后退。具体地,第一传动轮55和第二传动轮56沿拉杆51的运动方向间隔设置,且各传动轮的轮轴与所在的固定座之间还设置有轴承。
71.第三传动轮57位于第一传动轮55和第二传动轮56之间的上方,且上述三个传动轮之间通过传动带58进行联动,且三个传动轮使得传动带58保持张紧状态。步进电机53经减速机54与第三传动轮57传动连接。根据三个传动轮的设置方式,该传动带58大致形成一三角形。此时,拉杆51与第一、二传动轮之间的传动带58相连接。如此,当步进电机53通过减速机54带动第三传动轮57枢转时,传动带58可带动拉杆51进行前进或者后退。
72.为了使得拉杆51进行稳定的直线往复运动,出料驱动机构50还包括:滑块59和导轨591。此时,导轨591位于拉杆51的一侧。拉杆51通过滑块59与传动带58相连接,且滑块59同时能够沿滑轨进行滑动。如此,在拉杆51进行前进或者后退的同时,可通过滑块59沿滑轨进行导向滑动。
73.此外,第三传动轮57能够进行上下调节,如此便于调节第三传动轮57与其下方第一传动轮55、第二传动轮56之间的距离,进而有利于使得三个传动轮能够将传动带58进行持续张紧。相应的,步进电机53及减速机54整体通过一连接板592可调节地安装于机座593上。其中,机座593上设置有腰形调节孔和调节槽。连接板592通过穿过腰形调节孔的螺栓锁附于机座593上,且连接板592上的滑块59能够沿在连接板592上下调节的同时沿调节槽进行导向滑动。一个实施方式中,腰形调节孔分别开设于机座593上部的两侧,调节槽开设于
两侧腰形调节孔之间的区域。
74.虽然步进电机53可控制拉杆51运动一定的行程,但是无法通过步进电机53实现拉杆51的精确移动。因此,需要借助行程控制机构60实现拉杆51的精确移动。
75.行程控制机构60用于控制拉杆51前进或者后退的距离,以实现固体调料的精确出料。如此设置是考虑到,料盒320抽拉的运动行程与调料的出料量相关联。例如,当料盒移动一定距离使得其上的一个料槽被拉出时,则对应实现一个料槽重量份的固体调料的出料。从而,可通过精确控制拉杆51的运动距离,实现固体调料的精确定量出料。
76.行程控制机构60位于出料驱动机构50的一侧,其包括:第二激光传感器61、挡片62、位置感应开关63以及格栅尺64。
77.格栅尺64位于拉杆51的一侧,其具有沿拉杆51直线运动方向紧密排列的若干栅条,且若干栅条覆盖拉杆51的运动行程。第二激光传感器61与第一传动轮55、第二传动轮56之间传动带58相连接。从而,第二激光传感器61可随拉杆51的前进或者后退进行同步运动。同时,第二激光传感器61具有一槽口,该槽口中形成对射光路。第二激光传感器61的槽口延伸至格栅尺64的若干栅条处。
78.如此,当步进电机53工作时,其可带动第二激光传感器61随拉杆51进行同步运动,并使得其槽口沿格栅尺64的若干栅条进行相对运动。由于若干栅条之间具有间隙,当槽口沿若干栅条相对运动时,槽口中的对射光路周期地遮挡和连通,而对射光路每发生两次连通,则表明第二激光传感器61移动了一个栅条宽度的距离。从而,可根据对射光路被遮挡以及连通的次数,可精确反馈第二激光传感器61随拉杆51移动的距离。
79.在进行固体调料的出料时,由于料盒320移动一定距离对应实现一个料槽重量份的固体调料的出料。因此,根据调料的需求量,可对应得到拉杆51需要运动的位移。如上所述,第二激光传感器61与格栅尺64可用于精确控制拉杆51的移动的距离,从而,可通过第二激光传感器61与格栅尺64控制拉杆51的移动距离,实现固体调料的精确出料,进而满足实际菜品烹饪的需求。
80.由于拉杆51的前进对应推动料盒320进行出料。因此,需要标定拉杆51所在的初始位置为原点,同时标定拉杆51运动的两个极限位置,以使得料盒320在一定范围内进行运动。
81.为了实现上述目的,位置感应开关63沿拉杆51的运动方向分前、中、后三个位置,分置于拉杆51的一侧,中间的位置感应开关63对应拉杆51的原点位置,前部的位置感应开关63对应拉杆51前进的极限位置,后部的位置感应开关63对应拉杆51后退的极限位置。
82.挡片62用于与位置感应开关63相配合,二者相对设置时,位置感应开关63可感应挡片62所在的位置。相应的,挡片62固定于拉杆51所在的滑块59上,从而挡片62可随拉杆51的前进或者后退进行同步运动。同时,拉杆51位于初始位置时,挡片62与中间的位置感应开关63相对设置。
83.在固体调料出料时,首先通过中间的位置感应开关63判断拉杆51是否位于初始位置,当拉杆51位于初始位置时,步进电机53通过拉杆51带动料盒前进。根据所需固体调料的克数,在第二激光传感器61与格栅尺64的精确控制下,实现固体调料的精确出料。完成出料后,步进电机53带动拉杆51重新返回初始位置。
84.此外,在上述固体调料出来过程中,如挡片62随拉杆51移动至与前部的位置感应
开关63相对设置时,表明拉杆51已运动至极限位置,此时前部的位置感应开关63可反馈信号,使得步进电机53停止工作。
85.综上所述,本发明的固体调料添加装置通过设置激光传感器和格栅尺,对拉杆的位移进行精确控制,进而相应控制能够与拉杆相配合的料盒的位移,实现固体调料的精确出料。
86.对于本领域技术人员而言,显然本发明不限于上述示范性实施例的细节,而且在不背离本发明的精神或基本特征的情况下,能够以其他的具体形式实现本发明。因此,无论从哪一点来看,均应将实施例看作是示范性的,而且是非限制性的,本发明的范围由所附权利要求而不是上述说明限定,因此旨在将落在权利要求的等同要件的含义和范围内的所有变化囊括在本发明内。不应将权利要求中的任何附图标记视为限制所涉及的权利要求。
87.此外,应当理解,虽然本说明书按照实施方式加以描述,但并非每个实施方式仅包含一个独立的技术方案,说明书的这种叙述方式仅仅是为清楚起见,本领域技术人员应当将说明书作为一个整体,各实施例中的技术方案也可以经适当组合,形成本领域技术人员可以理解的其他实施方式。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1