一种拆卸菜铲方便的智能炒锅的制作方法
1.本实用新型涉及智能厨房领域,具体涉及一种拆卸菜铲方便的智能炒锅。
背景技术:
2.智能厨房的普及,为人们的生活带来了更多的便利。现有的智能厨房中,一般都会安装有烹饪模块,而烹饪模块中通常会设有用于炒菜的智能炒锅。现有一种横置的筒状炒锅,炒锅设有锅胆,锅胆侧壁开有开口供食物进出。在锅胆内安装有菜铲,菜铲连接有设置在锅胆外的驱转电机,驱转电机驱转菜铲绕锅胆的横轴线旋转从而搅拌翻炒锅胆内的食材。炒菜完成后,需要对锅胆内部进行清洗,鉴于菜铲连接驱转电机,拆卸起来比较麻烦,现有的菜铲的主体通常由多个部分拼装而成,在需要拆卸清洗时只需要单独拆卸这些拼装的部分即可而无需拆卸连接驱转电机的部分。然而,在拆卸这样的菜铲时,使用者需从锅胆的开口伸手进入到锅胆内对菜铲进行拆卸,作业空间受限于锅胆的内部空间,操作不便。
技术实现要素:
3.为解决上述问题,本实用新型提供一种拆卸菜铲方便的智能炒锅,该炒锅拆卸菜铲时操作空间大,拆卸操作方便。
4.提供一种拆卸菜铲方便的智能炒锅,包括卧置的筒状锅胆,其筒侧壁上开有供食材进出的开口,包括可拆卸地安装在锅胆内的菜铲,包括设在锅胆筒端面外的可拆卸式锁紧头和横置连杆,横置连杆连接锁紧头,能相对锁紧头绕自身横轴线旋转;锅胆的靠近锁紧头的筒端面上开有通至锅胆内的贯通孔,锁紧头安装到锅胆筒端面上,连杆随之轴向穿过贯通孔从而伸至锅胆内连接菜铲,菜铲借此可拆卸地安装到锅胆内从而能随连杆一同旋转炒菜;锁紧头拆卸后退离锅胆筒端面,连杆随之脱离菜铲并退出到锅胆外,此状态下菜铲可从锅胆的开口处取出。
5.还提供一种拆卸菜铲方便的智能炒锅,所述贯通孔具体系位于锅胆筒端面中心处。
6.还提供一种拆卸菜铲方便的智能炒锅,所述锁紧头具有外螺纹,所述锅胆的筒端面开有与外螺纹相配的螺纹孔,锁紧头具体是籍此螺纹安装到锅胆上的。
7.还提供一种拆卸菜铲方便的智能炒锅,所述锁紧头中部开有轴向通孔,所述连杆的端部容置在该轴向通孔中并连接锁紧头。
8.还提供一种拆卸菜铲方便的智能炒锅,包括能横向平移的线性模组和安装在该线性模组上的驱转电机,线性模组和驱转电机设在锅胆外,驱转电机能随线性模组移动至连接所述连杆的端部以驱转所述连杆。
9.还提供一种拆卸菜铲方便的智能炒锅,所述连杆的端部开有花键槽,该花键槽经所述轴向通孔显露;所述驱转电机的转轴具有与花键槽相配的花键头,驱转电机移动至花键头对接花键槽后从而实现所述驱转。
10.还提供一种拆卸菜铲方便的智能炒锅,所述连杆的杆体横截面为非圆形,所述菜
铲的轴端处开有与连杆杆体相配的通孔,连杆杆体穿过通孔后连接菜铲。
11.有益效果:菜铲通过连杆和锁紧头实现安装在锅胆内,而锁紧头安装在锅胆筒端面外侧,在需要拆卸菜铲时,拆卸工只需从锅胆外部拆卸锁紧头即可完成对菜铲的拆卸,拆卸操作方便。无需在锅胆的烹饪腔内执行拆卸操作,故而不需要受限于锅胆的内部空间,操作空间大。
附图说明
12.图1是智能炒锅隐去外壳的结构示意图。
13.图2是图1隐去前侧板、食材出料区的结构示意图。
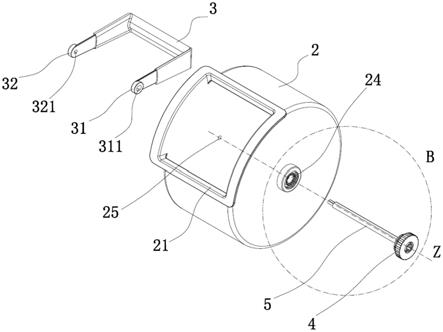
14.图3是图2中锅胆、菜铲、连杆和锁紧头的分离状态示意图。
15.图4是图3中b部分的放大图。
16.图5是沿图1中a-a方向的剖视图。
17.符号说明:
18.1-智能炒锅;11-前侧板;12-后侧板;13-食材出料区;14-烹饪区;141-机架;15-出菜区;2-锅胆;21-开口;22-凸台;23-螺纹孔;24-贯通孔;25-容置孔;3-菜铲;31-前轴端; 311-前通孔;32-后轴端;321-后通孔;4-锁紧头;41-轴向通孔;42-外螺纹;5-连杆;51
‑ꢀ
前端部;511-花键槽;52-杆体;6-线性模组;7-驱转电机;71-转轴;711-花键头;z-横轴线。
具体实施方式
19.以下结合具体实施方式作本发明创造作进一步详细说明。
20.智能炒锅设有外壳,隐去外壳后见图1,其设有前侧板11和后侧板12,前侧板11和后侧板12之间从上到下依次为食材出料区13、烹饪区14和出菜区15。烹饪区14从食材出料区13处接取食材后进行烹饪,烹饪完成后把食材倾倒至出菜区15以进行出菜。
21.见图2,烹饪区中设有可旋转的弧状机架141,弧状机架141中可拆卸地安装有卧置的筒状锅胆2,锅胆2能随机架141一体旋转。锅胆2内部中空用以烹饪食物,锅胆2筒侧壁上开有供食材进出的开口21。菜铲3需安装到锅胆2内以用于翻炒食材,为此,在锅胆2的前端面外设有可拆卸式锁紧头4和横置连杆5。见图3和图4,锁紧头4中部开有前后贯通的轴向通孔41,轴向通孔41内固定安装有轴承(图中未示出),连杆5前端部51通过该轴承容置在该轴向通孔41中,连杆5就与锁紧头4安装在一起了,且安装后的连杆5能相对锁紧头4 绕自身横轴线z旋转。锁紧头4后端开有外螺纹42,锅胆2前端面中心处朝前伸出有凸台22,凸台22中部开有与锁紧头4外螺纹42相配的螺纹孔23。在锅胆2的凸台中心处开有供连杆 5杆体52穿过的贯通孔24,该贯通孔24前后贯通锅胆2前端部和凸台22,通至锅胆2内部。在菜铲3的前轴端31上和后轴端32上分别开有与连杆5杆体52相配的前通孔311和后通孔 321,在锅胆2后端部的内侧壁中心开有容置连杆5后轴端32的容置孔25。
22.若要安装菜铲3,使用者首先把菜铲3从锅胆2的开口21放入到锅胆2内,然后使菜铲 3前轴端31的前通孔311对准锅胆2前端面的贯通孔24并使菜铲3后轴端32的后通孔321 对准锅胆2后端部的容置孔25。随后,从锅胆2外令连杆5对准锅胆2的贯通孔24,并使连杆5连同锁紧头4一同后移,直至锁紧头4的外螺纹42完全拧入到锅胆2凸台22的螺纹孔 23中,锁紧头4就安装到锅胆2前端面上了。在连杆5后移的过程中,连杆5依次轴向穿过锅胆2贯通
孔24、菜铲3前通孔311、菜铲3后通孔321并最终容置到锅胆2的容置孔25中,菜铲3就安装到连杆5上,并借由锁紧头4固定安装到锅胆2内,能随连杆5一同绕横轴线 z旋转以进行炒菜。为了让连杆5能更好地带动菜铲3旋转,连杆5杆体52的横截面优选为非圆形。在其它非优选的实施例中,连杆5的杆体52横截面可以改为圆形,但这样的连杆5 在带动菜铲3旋转时,两者之间容易发生相对运动,影响带动旋转的效果。
23.见图1、图4和图5,在智能炒锅1的前侧板11的前侧壁上设有线性模组6和驱动线性模组6前后平移的电机(图中未示出),线性模组6上安装有随线性模组6前后平移的驱转电机7,其用于驱动连杆5旋转。驱转电机7的转轴71后端为花键头711,朝后穿过前侧板11。连杆5前端部51相应地开有与花键头711相配的花键槽511,该花键槽511经锁紧头4的轴向通孔41显露,如此,电机驱动线性模组6向后平移,从而带动驱转电机7及其转轴71后移,直至驱转电机7的转轴71伸入到锁紧头4的轴向通孔41后,转轴71的花键头711接合轴向通孔41内的连杆5的花键槽511,则驱转电机7能驱转连杆5绕自身横轴线z旋转从而带动菜铲3旋转炒菜。
24.若要拆卸菜铲3以进行清洗,见图3和图5,使用者需先使电机驱动线性模组6向前平移,从而带动驱转电机7朝前远离连杆5和锁紧头4,然后拧松锁紧头4后使其退离锅胆2 的前端面,连杆5就随之依次脱离锅胆2容置孔25、菜铲3后通孔321、菜铲3前通孔311 和锅胆2贯通孔24并退出到锅胆2外。此时使用者可直接从锅胆2的开口21处取出菜铲3,完成拆卸操作。
25.如上所述仅为本发明创造的实施方式,不以此限定专利保护范围。本领域技术人员在本发明创造的基础上作出非实质性的变化或替换,仍落入专利保护范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1