控制台用升降移动机构的制作方法
1.本实用新型属于控制台设备技术领域,尤其是涉及一种控制台用升降移动机构。
背景技术:
2.随着社会的发展和科技的日新月异,人们的思想理念也处在进步之中,鉴别的能力和欣赏的水平也随之提高。控制台的应用越来越广泛,涵盖电力生产和电力调度中心,核工业设施运行中心,能源生产中心,交通运行监控中心,航空航天任务监控中心,公共安全任务监控中心,金融交易中心监控中心,广播电视监控中心,工厂中控室等等非常多的应用场景,这些类型的控制室,监控中心,控制中心都属于关键任务控制环境,影响着经济与社会的有序运作。
3.传统的控制台集大屏幕显示单元、实时处理单元、电源模块、控制操作模块等于一体,通常为落地式结构,有标准的工作台面。一般的结构尺寸均在宽600mm、高1400mm、深800mm以上,重量大于180kg,占地面积较大且搬运移动困难,通常一次安装放置定位后不再移动。随着控制台技术的不断发展进步,人们对于控制台的不同功能应用需求也越来越多,人们开始需求一种简单方便,便于移动的控制台,以适应日益变化的各种工作场合需求。
技术实现要素:
4.有鉴于此,本实用新型提出一种控制台用升降移动机构。具体为:
5.控制台用升降移动机构,包括支撑板、电动推杆、两组连杆单元、两块升降板和四个万向轮;支撑板包括中部的底壁部和两侧弯折向上延伸的侧壁部,每侧的侧壁部的顶端还向外水平延伸有横板部,底壁部和两侧的侧壁部共同形成向下凹陷的凹槽空间,电动推杆和两组连杆单元位于凹槽空间中;两侧的横板部底面分别安装一对万向轮,且万向轮的最低点低于底壁部的底面;每组连杆单元包括上连杆、下连杆和中连杆,上连杆顶端与固定于升降板的上铰接座相铰接,上连杆的底端与下连杆的顶端、中连杆远离电动推杆的外端相铰接,定义此铰接轴心为第一铰接轴心;下连杆的底端与固定于支撑板侧壁部的下铰接座相铰接;电动推杆的伸缩杆头部和固定部分别各与对应侧的中连杆的内端相铰接,定义此铰接轴心为第二铰接轴心;第二铰接轴心与第一铰接轴心相垂直,上连杆与上铰接座相铰接的铰接轴心、下连杆与下铰接座相铰接的铰接轴心分别与第一铰接轴心相平行。
6.进一步,升降板包括由横板体和纵板体一体组成的t型板主体,t型板主体前后两端分别固接有一用于与控制台底部相固接的连接部。
7.进一步,上铰接座固定于纵板体朝向电动推杆的侧面中部,且上铰接座位于横板体的下方。
8.进一步,下铰接座固接于对应侧的侧壁部与底壁部的相交处。
9.进一步,两个第一铰接轴心位于两个下连杆与对应的下铰接座相铰接的铰接轴心之间。
10.进一步,每块升降板固接有一能与对应侧横板部相抵接限位的止挡部。
11.进一步,止挡部和横板部之间还设有橡胶垫。
12.进一步,橡胶垫固接于止挡部下表面。
13.本实用新型的控制台用升降移动机构,便于与原有控制台结构方便的进行加装组合,加装此结构后的控制台能够很方便的进行移动。
附图说明
14.构成本实用新型的一部分的附图用来提供对本实用新型的进一步理解,本实用新型的示意性实施例及其说明用于解释本实用新型,并不构成对本实用新型的不当限定。在附图中:
15.图1为加装升降移动机构后的控制台的主视示意图;
16.图2为加装升降移动机构后的控制台的左视示意图;
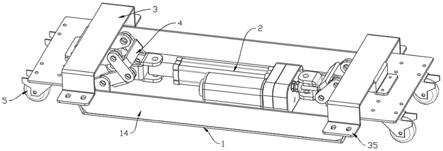
17.图3为升降移动机构的立体示意图;
18.图4为升降移动机构的俯视图;
19.图5为图4中aa向剖视图。
具体实施方式
20.需要说明的是,在不冲突的情况下,本实用新型中的实施例及实施例中的特征可以相互组合。
21.下面将参考附图并结合实施例来详细说明本实用新型。
22.如图1和图2所示,本实用新型的升降移动机构可加装于控制台的底面,在不使用时,控制台100由四个地脚101支撑,升降移动机构200处于收缩状态,整体的最低位置与地面留有间隙。
23.如图3至图5所示,升降移动机构包括支撑板1、电动推杆2、两组连杆单元4、两块升降板3和四个万向轮5。
24.支撑板1包括位于中部的底壁部11和两侧弯折向上延伸的侧壁部12,每侧的侧壁部的顶端还向外水平延伸有横板部13,底壁部11和两侧的侧壁部12共同形成向下凹陷的凹槽体,凹槽体的凹陷空间为电动推杆2和两组连杆单元4提供了容纳空间,使得整个机构在收缩状态时的整体高度得以有效缩减。
25.两侧的横板部13底面分别安装一对万向轮5,且万向轮5的最低点低于底壁部11的底面,从而当整个机构伸展时,四个万向轮5先接触到地面,且也只有万向轮接触地面,支撑板1的底壁部不会触碰地面影响移动。
26.每组连杆单元4对应与一侧的侧壁部12和一块升降板3临近并分别相铰接,电动推杆2则位于两组连杆单元4之间,且电动推杆2的伸缩杆21头部和固定部分别与对应侧的连杆单元4相铰接。
27.为方便描述,以与电动推杆2伸缩杆轴心线方向相平行的方向为左右方向,与左右方向相垂直的且位于同一水平面的对应方向为前后方向,以电动推杆2为中心,朝向电动推杆2的方向为内侧、内端方向,背离电动推杆2的方向为外侧、外端方向。
28.具体的,每组连杆单元4包括上连杆42、下连杆44和中连杆41,上连杆42顶端与上铰接座43一端相铰接,上铰接座43另一端与对应的升降板3相固接,具体的,升降板3包括由
横板体31和纵板体32一体组成的t型板主体,t型板主体前后两端分别固接有一连接部35,每块升降板3通过两端的连接部35与控制台底部相固接,从而将整个机构固定于控制台的底面,因此,两块升降板3之间的间距是固定不变的。
29.上铰接座43固定于纵板体32朝向电动推杆2的侧面中部,且上铰接座43位于横板体31的下方,从而由横板体31对其及连杆单元起到一定的防护作用。
30.上连杆43的底端与下连杆44的顶端、中连杆41远离电动推杆2的外端相铰接,定义此铰接轴心为第一铰接轴心。
31.下连杆44的底端与下铰接座45的一端相铰接,下铰接座45的另一端与对应侧的侧壁部12相固接;优选的,下铰接座45固接于对应侧的侧壁部12与底壁部11的相交处,从而节省空间,缩小体积。
32.电动推杆2的伸缩杆头部和固定部分别各与对应侧的中连杆41的内端相铰接,定义此铰接轴心为第二铰接轴心,第二铰接轴心与第一铰接轴心相垂直,上连杆43与上铰接座43相铰接的铰接轴心、下连杆44与下铰接座45相铰接的铰接轴心分别与第一铰接轴心相平行。
33.进一步,两个第一铰接轴心位于两个下连杆44与对应的下铰接座45相铰接的铰接轴心之间。相应的电动推杆2的最大伸长长度的选型也应满足此要求,从而避免发生结构损伤,并且能保证最佳升降力度控制。
34.两块升降板3之间的间距是固定不变的,两个下铰接座之间的间距也是固定不变的,因此,整个机构安装于控制台底面后,形成了上、下两个等边梯形,由电动推杆2充当的这一边长度可变,因此,在需要对控制台移动位置时,通过控制电动推杆2伸长,即可实现支撑板1带动万向轮相对下降至接触地面并将控制台整体抬升,使控制台自身的地脚上升脱离底面,由万向轮来支撑实现控制台的移动;移动到位后,控制电动推杆2回缩,使机构收缩,控制台重新由地脚支撑。
35.进一步,为防止回缩过度,每块升降板3固接有一能与对应侧横板部13相抵接限位的止挡部33,为避免抵接磕碰的噪声和损伤,止挡部33和横板部13之间还设有橡胶垫34.较佳的,橡胶垫34固接于止挡部下表面。
36.为增强支撑板整体尤其是凹槽体的牢固度,底壁部11和两侧的侧壁部12之间还焊接固定有加强筋侧壁14。
37.以上所述仅为本实用新型的较佳实施例而已,并不用以限制本实用新型,凡在本实用新型的精神和原则之内,所作的任何修改、等同替换、改进等,均应包含在本实用新型的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1