智能扫地机器人
1.本实用新型实施例属于清扫设备技术领域,尤其涉及智能扫地机器人。
背景技术:
2.随着科学水平的进步,人们的生活节奏越来越快。也越来越无暇处理扫地除尘等家务活动。为满足人们在这方面日益高涨的需求,目前市场上开始出现扫地机器人来代替人工完成家庭内的扫地除尘。
3.扫地机器人,又称自动打扫机、智能吸尘、机器人吸尘器等,是智能家用电器的一种,能凭借一定的人工智能,自动在房间内完成地板清理工作。在相关技术中的扫地机器人,不便于对内部的组件进行清理,在内部收集的灰尘过多时,需要耗费大量的时间将其拆开再对其进行清理,使用不便利。
技术实现要素:
4.本实用新型实施例的目的在于提供智能扫地机器人,旨在解决传统的扫地机器人,不便于对内部的组件进行清理,在内部收集的灰尘过多时,需要耗费大量的时间将其拆开再对其进行清理,使用不便利。
5.本实用新型实施例是这样实现的,智能扫地机器人,包括:
6.壳体,所述壳体底部固定设置有固定板;
7.移动组件,设置在所述固定板上;
8.清扫组件,设置在所述固定板上,且与所述移动组件联动;
9.吸尘组件,设置在所述固定板上,通过清扫组件对该扫地机器人经过的区域进行清扫,扬起的灰尘通过吸尘组件进行收集处理;
10.盖板,通过安装组件拆装式安装在所述壳体的顶部敞口处,在具体使用过程中,通过操作安装组件,使得盖板从壳体的敞口处能够取下,进而方便对壳体内的吸尘组件上所收集的粉尘进行吸收,其中,所述壳体的顶部敞口处还开设有锁定孔;所述安装组件包括与所述锁定孔相适配的锁定块;所述锁定块通过第一弹性件设置在所述盖板上,所述锁定块的下表面具有一倾斜面,且所述倾斜面朝下设置;所述盖板上还设置有用于拉动锁定块使其缩进盖板内的收放件。
11.在本实用新型的一个优选实施方式中,所述盖板上开设有横向方形腔,所述第一弹性件包括:
12.滑动设于所述横向方形腔内的方形滑块,所述锁定块与所述方形滑块固定连接;
13.横向弹簧,一端与方形滑块连接,另一端与横向方形腔的内壁之间连接。
14.在本实用新型的一个优选实施方式中,所述收放件包括:
15.转动设置在所述盖板上的收放轮;
16.至少两组的刚性绳,刚性绳的数量与锁定块的数量相等,且刚性绳与锁定块之间相对应,刚性绳的端部连接安装在对应的方形滑块上;至少两组的刚性绳同向绕设在所述
收放轮上;
17.与所述收放轮同轴固定连接的旋转盘。
18.在本实用新型的一个优选实施方式中,所述壳体的顶部敞口处设置有对盖板的端部进行支撑的支撑台阶,以在将盖板安装在壳体的敞口处时,起到行程限位的作用,且对盖板进行支撑。
19.在本实用新型的一个优选实施方式中,所述壳体的顶部敞口内壁上安装有支板,所述支板上通过第二弹性件支撑设置有支承板,所述支承板用于对放置壳体敞口的盖板进行托起,可以理解的是,在将锁定块嵌入在锁定孔内的时候,此时的第二弹性件处于压缩状态,能够使得锁定块的顶部平面抵在锁定孔的顶面上,避免锁定块在锁定孔内晃动。
20.在本实用新型的一个优选实施方式中,所述第二弹性件包括:
21.固定安装在所述支板上的第一支撑筒;
22.通过第一支撑弹簧支撑滑动设置在所述第一支撑筒内的第一矩形滑块,所述支承板通过第一支撑轴支撑连接安装在第一矩形滑块上。
23.在本实用新型的一个优选实施方式中,所述吸尘组件包括:
24.固定安装在所述固定板上的吸风机;
25.与所述吸风机相连接的吸尘口,所述吸尘口的进尘口延伸至所述固定板的下方。
26.在本实用新型的一个优选实施方式中,所述移动组件包括:
27.转动设置在所述固定板底部的驱动轴;
28.固定安装在所述驱动轴上的滚轮;
29.用于驱动所述驱动轴旋转的驱动电机,所述驱动电机安装在壳体底部的内侧壁上。
30.在本实用新型的一个优选实施方式中,所述清扫组件包括:
31.转动设置在所述固定板底部的旋转轴,所述旋转轴与对应的驱动轴之间通过齿轮啮合方式传动连接;
32.偏心安装在所述旋转轴上的偏心轮;
33.清扫电机,所述清扫电机安装在固定板上,所述清扫电机的输出轴上连接设置有第三弹性件;
34.竖向移动的支撑罩,支撑罩上转动设置有清扫盘,所述清扫盘与所述第三弹性件之间同轴连接,所述清扫盘的下表面均布设置有若干清扫毛刷。
35.在本实用新型的一个优选实施方式中,所述第三弹性件包括与所述清扫电机的输出轴同轴连接的第二支撑筒;所述第二支撑筒内腔通过第二支撑弹簧支撑滑动设置有第二矩形滑块;贯穿滑动延伸至所述第二支撑筒内的第二支撑轴端部与所述第二矩形滑块之间固定连接,通过设置的第二支撑弹簧,以使在支撑罩被向下推的时候,第二支撑弹簧被压缩,随着偏心轮的继续旋转,第二支撑弹簧的弹性复位力使支撑罩上移,于此,在做偏心运动的偏心轮的作用下,能够使得支撑罩在竖直方向上往复运动。
36.与现有技术相比,本实用新型实施例提供的扫地机器人的有益效果为:通过手动使旋转盘旋转,从而能够利用旋转的收放轮对至少两组的刚性绳进行同步收卷,从而使得对应的锁定块缩进盖板内,即此时的锁定块从对应的锁定孔内脱离,此时可以直接将盖板从壳体上拿掉;在将盖板安装在壳体上时,将放置在壳体顶部敞口的盖板下压,此时的锁定
块倾斜面抵在壳体顶端敞口的棱边上,此时的第一弹性件处于压缩状态,使得锁定块缩进盖板内,在锁定块对准锁定孔时,在第一弹性件的支撑力作用下,使得锁定块嵌入对应的锁定孔内,完成将盖板安装在壳体上的效果,对盖板的拆装很方便,有效解决传统的扫地机器人不便于对内部的组件进行清理的问题。
附图说明
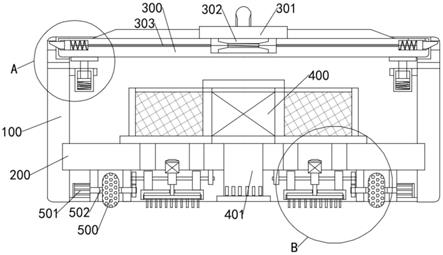
37.图1为本实用新型实施例智能扫地机器人的结构图;
38.图2为图1中a处的放大结构示意图;
39.图3为图1中b处的放大结构示意图;
40.图4为本实用新型实施例智能扫地机器人中收放轮的绕线图;
41.图5为本实用新型实施例智能扫地机器人中清扫组件的局部立体示意图。
42.附图1-5中:100、壳体;101、锁定孔;102、支撑台阶;103、支板;104、支承板;105、第一支撑筒;106、第一支撑弹簧;107、第一矩形滑块;108、第一支撑轴;200、固定板;300、盖板;301、旋转盘;302、收放轮;303、刚性绳;304、横向方形腔;305、横向弹簧;306、方形滑块;307、锁定块;400、吸风机;401、吸尘口;500、滚轮;501、驱动电机;502、驱动轴;600、支撑罩;601、清扫盘;602、清扫毛刷;603、偏心轮;604、旋转轴;605、第二支撑筒;606、清扫电机;607、第二支撑轴;608、第二矩形滑块;609、第二支撑弹簧。
具体实施方式
43.为了使本实用新型的目的、技术方案及优点更加清楚明白,以下结合附图及实施例,对本实用新型进行进一步详细说明。应当理解,此处所描述的具体实施例仅仅用以解释本实用新型,并不用于限定本实用新型。以下结合具体实施例对本实用新型实施例提供的扫地机器人的具体实现进行详细描述。
44.如图1所示,为本实用新型的一个实施例提供的智能扫地机器人的结构图,所述的智能扫地机器人包括:
45.壳体100,所述壳体100底部固定设置有固定板200;
46.移动组件,设置在所述固定板200上;
47.清扫组件,设置在所述固定板200上,且与所述移动组件联动;
48.吸尘组件,设置在所述固定板200上,通过清扫组件对该扫地机器人经过的区域进行清扫,扬起的灰尘通过吸尘组件进行收集处理;
49.盖板300,通过安装组件拆装式安装在所述壳体100的顶部敞口处,在具体使用过程中,通过操作安装组件,使得盖板300从壳体100的敞口处能够取下,进而方便对壳体100内的吸尘组件上所收集的粉尘进行吸收,其中,所述壳体100的顶部敞口处还开设有锁定孔101;所述安装组件包括与所述锁定孔101相适配的锁定块307;所述锁定块307通过第一弹性件设置在所述盖板300上,所述锁定块307的下表面具有一倾斜面,且所述倾斜面朝下设置;所述盖板300上还设置有用于拉动锁定块307使其缩进盖板300内的收放件。
50.具体的,如图1-2所示,在本实用新型提供的一个优选实施方式中,所述盖板300上开设有横向方形腔304,所述第一弹性件包括:
51.滑动设于所述横向方形腔304内的方形滑块306,所述锁定块307与所述方形滑块
306固定连接;
52.横向弹簧305,一端与方形滑块306连接,另一端与横向方形腔304的内壁之间连接。
53.请继续参阅图1、图2和图4,在本实用新型提供的优选实施方式中,所述收放件包括:
54.转动设置在所述盖板300上的收放轮302;
55.至少两组的刚性绳303,刚性绳303的数量与锁定块307的数量相等,且刚性绳303与锁定块307之间相对应,刚性绳303的端部连接安装在对应的方形滑块306上;至少两组的刚性绳303同向绕设在所述收放轮302上,如图4所示,示出了刚性绳303绕设在收放轮302上的绕线方式示意图;
56.所述的收放件还包括:
57.与所述收放轮302同轴固定连接的旋转盘301。
58.因此,在具体使用时,通过手动使旋转盘301旋转,从而能够利用旋转的收放轮302对至少两组的刚性绳303进行同步收卷,从而使得对应的锁定块307缩进盖板300内,即此时的锁定块307从对应的锁定孔101内脱离,此时可以直接将盖板300从壳体100上拿掉;相反的,在将盖板300安装在壳体100上时,将放置在壳体100顶部敞口的盖板300下压,此时的锁定块307倾斜面抵在壳体100顶端敞口的棱边上,此时的第一弹性件处于压缩状态,使得锁定块307缩进盖板300内,在锁定块307对准锁定孔101时,在第一弹性件的支撑力作用下,使得锁定块307嵌入对应的锁定孔101内,完成将盖板300安装在壳体100上的效果,拆装方便。
59.进一步的,在本实用新型的一个优选实施方式中,所述壳体100的顶部敞口处设置有对盖板300的端部进行支撑的支撑台阶102,以在将盖板300安装在壳体100的敞口处时,起到行程限位的作用,且对盖板300进行支撑。
60.进一步的,如图2所示,所述壳体100的顶部敞口内壁上安装有支板103,所述支板103上通过第二弹性件支撑设置有支承板104,所述支承板104用于对放置壳体100敞口的盖板300进行托起,可以理解的是,在将锁定块307嵌入在锁定孔101内的时候,此时的第二弹性件处于压缩状态,能够使得锁定块307的顶部平面抵在锁定孔101的顶面上,避免锁定块307在锁定孔101内晃动。
61.其中,如图2所示,在本实用新型实施例中,所述第二弹性件包括:
62.固定安装在所述支板103上的第一支撑筒105;
63.通过第一支撑弹簧106支撑滑动设置在所述第一支撑筒105内的第一矩形滑块107,所述支承板104通过第一支撑轴108支撑连接安装在第一矩形滑块107上。
64.请继续参阅图1,在本实用新型实施例中,所述吸尘组件包括:
65.固定安装在所述固定板200上的吸风机400;
66.与所述吸风机400相连接的吸尘口401,所述吸尘口401的进尘口延伸至所述固定板200的下方。
67.进一步的,如图1和图3所示,在本实用新型提供的优选实施方式中,所述移动组件包括:
68.转动设置在所述固定板200底部的驱动轴502;
69.固定安装在所述驱动轴502上的滚轮500;
70.用于驱动所述驱动轴502旋转的驱动电机501,所述驱动电机501安装在壳体100底部的内侧壁上。
71.因此,在本实用新型实施例提供的移动组件的具体使用时,利用驱动电机501驱动驱动轴502旋转,能够带动滚轮500旋转,从而能够实现使整个扫地机器人进行移动的效果。
72.请继续参阅图1、图3和图5,在本实用新型提供的优选实施方式中,所述清扫组件包括:
73.转动设置在所述固定板200底部的旋转轴604,所述旋转轴604与对应的驱动轴502之间通过齿轮啮合方式传动连接;
74.偏心安装在所述旋转轴604上的偏心轮603;
75.清扫电机606,所述清扫电机606安装在固定板200上,所述清扫电机606的输出轴上连接设置有第三弹性件;
76.竖向移动的支撑罩600,支撑罩600上转动设置有清扫盘601,所述清扫盘601与所述第三弹性件之间同轴连接,所述清扫盘601的下表面均布设置有若干清扫毛刷602。
77.因此,在本实施例提供的清扫组件的具体使用过程中,在第三弹性件的连接作用下,利用清扫电机606驱动清扫盘601旋转,进而带动清扫毛刷602运动以提高对地面的清扫效果;且扫地机器人移动过程中,旋转的驱动轴502带动旋转轴604旋转,进而使得偏心运动的偏心轮603推动支撑罩600下移,并配合第三弹性件,能够使得支撑罩600上下移动,即清扫盘601在竖直方向上的高度不断变化,提高清扫效果。
78.如图5所示,在本实用新型实施例中,所述第三弹性件包括与所述清扫电机606的输出轴同轴连接的第二支撑筒605;所述第二支撑筒605内腔通过第二支撑弹簧609支撑滑动设置有第二矩形滑块608;贯穿滑动延伸至所述第二支撑筒605内的第二支撑轴607端部与所述第二矩形滑块608之间固定连接,通过设置的第二支撑弹簧609,以使在支撑罩600被向下推的时候,第二支撑弹簧609被压缩,随着偏心轮603的继续旋转,第二支撑弹簧609的弹性复位力使支撑罩600上移,于此,在做偏心运动的偏心轮603的作用下,能够使得支撑罩600在竖直方向上往复运动。
79.以上各方案均只是一种较佳实例的说明,但并不局限于此。在实施本实用新型时,可以根据使用者需求进行适当的替换和/或修改。
80.这里说明的设备数量和处理规模是用来简化本实用新型的说明的。对本实用新型的应用、修改和变化对本领域的技术人员来说是显而易见的。
81.尽管本实用新型的实施方案已公开如上,但其并不仅仅限于说明书和实施方式中所列运用。它完全可以被适用于各种适合本实用新型的领域。对于熟悉本领域的人员而言,可容易地实现另外的修改。因此在不背离权利要求及等同范围所限定的一般概念下,本实用新型并不限于特定的细节和这里示出与描述的图例。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1