一种家用清洁机器人的制作方法
1.本实用新型涉及机器人领域,尤其涉及一种家用清洁机器人。
背景技术:
2.随着人们生活水平的提高,各类机器人已经逐渐走进千家万户,比如可以进行扫地的清洁机器人,能够将地面的灰尘清除,以保证地面的清洁。
3.现有的清洁机器人,虽然能够对地面进行清洁,但是面对附着在地面上的灰尘却不易进行清除,故需要一种家用清洁机器人以解决上述问题。
技术实现要素:
4.本实用新型实施例的目的在于提供一种家用清洁机器人,旨在解决以下问题:现有的清洁机器人对附着在地面的灰尘不易进行清洁。
5.本实用新型实施例是这样实现的,一种家用清洁机器人,包括:壳体,其两侧安装有用于带动机器人本体移动的滚轮;刮除机构,其固定安装在壳体上且位于两侧滚轮内侧,用于对黏附在地面的灰尘进行刮除;支撑箱,其安装在壳体内且开设有通口,所述支撑箱上安装有吸尘机构,吸尘机构吸气端穿过壳体延伸至壳体外部两侧,吸尘机构可拆除以对吸收的灰尘进行清洁。
6.优选地,所述刮除机构包括:安装架,其固定安装在壳体一侧,所述安装架内固定设置有用于为刮除机构提供动力的驱动组件;导套,其一端与驱动组件固定连接,导套可在驱动组件的带动下左右往复运动,所述导套内配合设置有导柱,导柱可在导套的方向上移动;刮除块,与导柱远离导套的一端固定连接,刮除块和导套之间固定设置有用于将刮除块下压的第一弹性件,刮除块用于对附着地面的灰尘进行清洁。
7.优选地,所述驱动组件包括:驱动轮,其转动安装在安装架内,驱动轮边缘处固定设置有驱动柱,驱动柱可在驱动轮的带动下绕着驱动轮中心转动;导向杆,其两端与安装架内壁固定连接且分布在驱动轮两侧,所述导向杆上套设有导向块,导向块可在导向杆上滑动,导向块和安装架内壁之间固定设置有用于为导向块运动提供缓冲的第二弹性件;驱动杆,其两端和两侧导向块相互接近端固定连接,所述驱动杆开设有通槽,驱动柱穿过驱动杆通槽以带动驱动杆移动。
8.优选地,所述吸尘机构包括:收集箱,其穿过支撑箱所开设的通口且可从收集箱中取出,所述收集箱两侧开设有用于灰尘进入的进料口;固定组件,其安装在收集箱和支撑箱之间,支撑箱通过固定组件将收集箱锁紧固定;进料管,其一端设置在壳体内,进料管另一端延伸至壳体外且固定连接有进料斗,灰尘可由进料斗进入到进料管内;抽风机,与进料管设置在壳体内的一端连接,用于为进料斗吸尘提供动力支持,抽风机上还固定设置有延伸至支撑箱内的出料管,出料管设置在支撑箱内的一端固定设置有出料斗,出料斗设置在收集箱所开设的进料口处。
9.优选地,所述固定组件包括:支板,其固定安装在支撑箱内,支板上滑动穿过有拉
动件;凸轮,其转动安装在支撑箱内壁上,所述凸轮转轴延伸至支撑箱外且固定设置有转把,凸轮接触有可在凸轮挤压下移动的滚轮,滚轮转轴固定设置在拉动件内侧;斜块,其与拉动件固定连接,斜块与支板之间固定设置有第三弹性件;第四弹性件,其固定设置在支撑箱内壁上,所述第四弹性件上固定设置有推板;固定杆,其与收集箱固定连接且一侧开设有槽口,斜块可进入槽口以限制固定杆运动,推板用于将固定杆推出。
10.本实用新型提供的家用清洁机器人不仅可以对地面的灰尘进行吸附清洁,还能够对附着在地面的灰尘进行刮除并进行再次吸附,操作简单,实用性较强。
附图说明
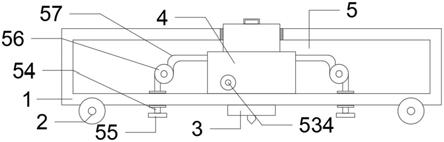
11.图1为家用清洁机器人结构示意图。
12.图2为家用清洁机器人的驱动组件示意图。
13.图3为家用清洁机器人的导套、导柱示意图。
14.图4为家用清洁机器人的吸尘机构局部示意图。
15.图5为家用清洁机器人的固定组件示意图。
16.附图中:1-壳体,2-滚轮,3-刮除机构,4-支撑箱,5-吸尘机构,31-安装架,32-驱动组件,33-导套,34-导柱,35-刮除块,36-第一弹性件,321-驱动轮,322-驱动柱,323-导向杆,324-导向块,325-第二弹性件,326-驱动杆,51-收集箱,52-进料口,53-固定组件,54-进料管,55-进料斗,56-抽风机,57-出料管,58-出料斗,531-支板,532-拉动件,533-凸轮,534-转把,535-滚轮,536-斜块,537-第三弹性件,538-第四弹性件,539-推板,5310-固定杆,5311-槽口。
具体实施方式
17.为了使本实用新型的目的、技术方案及优点更加清楚明白,以下结合附图及实施例,对本实用新型进行进一步详细说明。应当理解,此处所描述的具体实施例仅仅用以解释本实用新型,并不限定本实用新型。
18.以下结合具体实施例对本实用新型的具体实现进行详细描述。
19.请参阅图1,本实用新型实施例提供的一种家用清洁机器人,所述家用清洁机器人包括:
20.壳体1,其两侧安装有用于带动机器人本体移动的滚轮2;刮除机构3,其固定安装在壳体1上且位于两侧滚轮2内侧,用于对黏附在地面的灰尘进行刮除;支撑箱4,其安装在壳体1内且开设有通口,所述支撑箱4上安装有吸尘机构5,吸尘机构5吸气端穿过壳体1延伸至壳体1外部两侧,吸尘机构5可拆除以对吸收的灰尘进行清洁。
21.本实施例在具体使用时,首先将该机器人本体至于地面上,然后可通过滚轮2对壳体1的位置进行调整,以实现对机器人本体位置的调节,具体使用时,开启刮除机构3和吸尘机构5,当滚轮2带动壳体1向前移动时,吸尘机构5的右侧对易吸取的灰尘吸收,随着壳体1的移动,刮除机构3可对粘附在地面的灰尘进行刮除,刮除后的灰尘随着壳体1的移动再由吸尘机构5的右侧吸收,最终灰尘流入到吸尘机构5内收集。
22.如图2和图3所示,作为本实用新型的一种优选实施例,所述刮除机构3包括:安装架31,其固定安装在壳体1一侧,所述安装架31内固定设置有用于为刮除机构3提供动力的
驱动组件32;导套33,其一端与驱动组件32固定连接,导套33可在驱动组件32的带动下左右往复运动,所述导套33内配合设置有导柱34,导柱34可在导套33的方向上移动;刮除块35,与导柱34远离导套33的一端固定连接,刮除块35和导套33之间固定设置有用于将刮除块35下压的第一弹性件36,刮除块35用于对附着地面的灰尘进行清洁。
23.本实施例在具体使用时,开启驱动组件32,驱动组件32可通过导套33及导柱34带动刮除块35左右往复运动,同时在第一弹性件36的压动下,第一弹性件36具体为弹簧,刮除块35可贴合地面,从而在驱动组件32的带动下,刮除块35左右往复运动对附着在地面的灰尘进行刮除。
24.如图2所示,作为本实用新型的一种优选实施例,所述驱动组件32包括:驱动轮321,其转动安装在安装架31内,驱动轮321边缘处固定设置有驱动柱322,驱动柱322可在驱动轮321的带动下绕着驱动轮321中心转动;导向杆323,其两端与安装架31内壁固定连接且分布在驱动轮321两侧,所述导向杆323上套设有导向块324,导向块324可在导向杆323上滑动,导向块324和安装架31内壁之间固定设置有用于为导向块324运动提供缓冲的第二弹性件325;驱动杆326,其两端和两侧导向块324相互接近端固定连接,所述驱动杆326开设有通槽,驱动柱322穿过驱动杆326通槽以带动驱动杆326移动。
25.本实施例在具体使用时,开启驱动轮321,驱动轮321动力来源为电机,驱动轮321转动带动驱动柱322绕着驱动轮321中心转动,驱动柱32转动可带动驱动杆326两端的导向块324沿着导向杆323做左右往复运动,第二弹性件325可对导向块324的运动提供缓冲,从而减小导向块324运动过程的震动,导向块324做左右往复运动即可通过套33及导柱34带动刮除块35左右往复运动,进而对吸附在地面的灰尘进行刮除。
26.如图1和图4所示,作为本实用新型的一种优选实施例,所述吸尘机构5包括:收集箱51,其穿过支撑箱4所开设的通口且可从收集箱51中取出,所述收集箱51两侧开设有用于灰尘进入的进料口52;固定组件53,其安装在收集箱51和支撑箱4之间,支撑箱4通过固定组件53将收集箱51锁紧固定;进料管54,其一端设置在壳体1内,进料管54另一端延伸至壳体1外且固定连接有进料斗55,灰尘可由进料斗55进入到进料管54内;抽风机56,与进料管54设置在壳体1内的一端连接,用于为进料斗55吸尘提供动力支持,抽风机56上还固定设置有延伸至支撑箱4内的出料管57,出料管57设置在支撑箱4内的一端固定设置有出料斗58,出料斗58设置在收集箱51所开设的进料口52处。
27.在对灰尘进行吸收时,开启两侧的抽风机56,在抽风机56的带动下,灰尘可由进料斗55进入并经进料管54、出料管57最终从出料斗58吹出,吹出后的灰尘由进料口52进入到收集箱51中收集,若要对收集箱51中的灰尘进行清理,可转动固定组件53的动力输入端,固定组件53即可将收集箱51向上弹出一小段距离,向上拉动收集箱51即可将收集箱51取出清理。
28.如图1和图5所示,作为本实用新型的一种优选实施例,所述固定组件53包括:支板531,其固定安装在支撑箱4内,支板531上滑动穿过有拉动件532;凸轮533,其转动安装在支撑箱4内壁上,所述凸轮533转轴延伸至支撑箱4外且固定设置有转把534,凸轮533接触有可在凸轮533挤压下移动的滚轮535,滚轮535转轴固定设置在拉动件532内侧;斜块536,其与拉动件532固定连接,斜块536与支板531之间固定设置有第三弹性件537;第四弹性件538,其固定设置在支撑箱4内壁上,所述第四弹性件538上固定设置有推板539;固定杆5310,其
与收集箱51固定连接且一侧开设有槽口5311,斜块536可进入槽口5311以限制固定杆5310运动,推板539用于将固定杆5310推出。
29.当固定杆5310在收集箱51的带动下向下运动时,固定杆5310向下运动可向左挤压斜块536,斜块536向左运动带动拉动件532向左运动并挤压第三弹性件537,第三弹性件537收缩,当斜块536和槽口5311齐平时,在第三弹性件537的弹力作用下,斜块536向右运动进入到槽口5311中,完成对固定杆5310的锁定,同时,固定杆5310向下运动使得推板539向下运动并挤压第四弹性件538,当需要将收集箱51取出时,转动转把534,转把534转动带动凸轮533转动,凸轮533转动带动滚轮535向左运动,滚轮535向左运动带动拉动件532向左拉动斜块536,斜块536向左运动并逐渐离开槽口5311,此时,在第四弹性件538的推动下,推板539可向上运动将固定杆5310向上推动一小段距离,此时,向上拉动收集箱51即可将收集箱51取出清理。
30.以上所述仅为本实用新型的较佳实施例而已,并不用以限制本实用新型,凡在本实用新型的精神和原则之内所作的任何修改、等同替换和改进等,均应包含在本实用新型的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1