一种机器人用餐锅的制作方法
1.本实用新型涉及烹饪餐具领域,更具体的说是涉及一种机器人用餐锅。
背景技术:
2.随着信息时代的进步,ai智能与生活不断结合,则衍生出众多的智能机器人,本实用新型针对的是餐饮领域,民以食为天,众多的办公大厦内均开设有餐饮店和便利店,其目的均是给予办公人员提供餐食,但是现在的餐食方式有:餐饮店现点先做以及便利店的冷藏加热,更多的消费者还是会选择餐饮店的现点现做,但是该种方式消费者需要排队等候,即导致时间的浪费,因此餐饮店的现做方式存在耗时长的问题,且餐饮店的厨房以及厨具均存在不卫生因素,所以科技衍生出自动炒菜机器人,其包括机械手以及与机械手配合的餐锅,餐锅的底部套设在机械手的驱动部上,但是现有的餐锅就是如同一个碗状,通过不断的旋转餐锅以实现对碗内的菜进行翻炒,该种餐锅在翻炒过程中容易将菜汁倒出,且翻炒后将菜倒出时菜汁容易一次性全部倒出导致菜汁未完全倒入盘内。
技术实现要素:
3.针对现有技术存在的不足,本实用新型的目的在于提供一种机器人用餐锅,该餐锅能够提高机械手炒菜的效率、能够避免机械手翻炒时菜汁倒出以及能够在机械手倒菜时辅助将菜汁倒出。
4.为实现上述目的,本实用新型提供了如下技术方案:
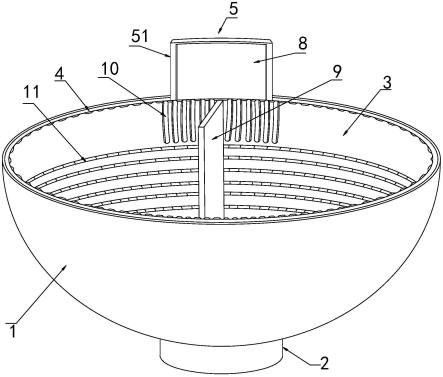
5.一种机器人用餐锅,包括锅体,所述锅体底部设有与机械手配合的连接套,所述锅体的锅口边沿处设有延伸至锅体侧壁内的滑槽,所述锅体的锅口边沿上设有滑动连接在滑槽内的挡汁结构,当所述机械手驱动锅体在倾斜状态下转动时,所述挡汁结构相对锅体滑动以使所述挡汁结构始终位于倾斜状态下锅口的下边沿处,所述挡汁结构用于阻挡锅体内的菜汁。
6.进一步的,所述挡汁结构包括挡板和若干个重力球,若干个所述重力球连接在位于滑槽内的挡板底部,所述滑槽的底部设有与重力球配合的球槽,位于所述滑槽内的挡板上还设有用于限位挡板脱离滑槽的限位条。
7.进一步的,所述挡板为弧形,所述挡板竖直在滑槽上,所述挡板朝向锅口一侧设有与锅口相通的引导槽。
8.进一步的,所述球槽的口径小于重力球的直径。
9.进一步的,所述锅体的内侧壁靠近锅口处设有用于翻菜的分隔板。
10.进一步的,所述锅口的边沿处设有若干个沿锅体内侧壁向下延伸的引流槽。
11.进一步的,所述锅体内侧壁上绕设有若干条用于避免菜与锅体内侧壁粘贴的突条。
12.本实用新型的有益效果:机械手与锅体底部的连接套固定连接,当需要翻炒时,机械手将锅体倾斜放在火源上翻炒,通过设置挡板能够在锅体转动时相对滑动,以使挡板始
终位于锅体的下端边沿,这样能够将倾斜转动状态下锅体流出的菜汁阻挡在挡板的引导槽内,当翻炒后机械手回正锅体,引导槽内的菜汁能够回到锅内;再通过锅体内部的分隔板以及突条能够使得锅体在倾斜转动时,内部的菜进行翻动,以实现菜的翻炒。
附图说明
13.图1是本实用新型的整体结构图;
14.图2是本实用新型剖视图;
15.图3是图2中a处放大图。
16.附图标记:1、锅体;2、连接套;3、锅口;4、滑槽;5、挡汁结构;51、挡板;52、重力球;6、球槽;7、限位条;8、引导槽;9、分隔板;10、引流槽;11、突条。
具体实施方式
17.下面结合附图和实施例,对本实用新型进一步详细说明。其中相同的零部件用相同的附图标记表示。需要说明的是,下面描述中使用的词语“前”、“后”、“左”、“右”、“上”和“下”指的是附图中的方向,词语“底面”和“顶面”、“内”和“外”分别指的是朝向或远离特定部件几何中心的方向。
18.现有的餐锅就是如同一个碗状,通过不断的旋转餐锅以实现对碗内的菜进行翻炒,该种餐锅在翻炒过程中容易将菜汁倒出,且翻炒后将菜倒出时菜汁容易一次性全部倒出导致菜汁未完全倒入盘内,因此本实用新型设计这种机器人用餐锅,具体结构如图1和图2所示,包括锅体1,锅体1底部设有与机械手配合的连接套2,机械手的驱动部固定连接在连接套2上,锅体1的锅口3边沿处设有延伸至锅体1侧壁内的滑槽4,锅体1的锅口3边沿上设有滑动连接在滑槽4内的挡汁结构5,当机械手驱动锅体1在倾斜状态下转动时,挡汁结构5相对锅体1滑动以使挡汁结构5始终位于倾斜状态下锅口3的下边沿处,挡汁结构5用于阻挡锅体1内的菜汁,具体的机械手在炒菜时是将锅体1倾斜一定角度,然后不断旋转,使得锅体1转动,火源作用在锅体1的外侧面上,挡汁结构5在滑槽4内滑动始终在位于火源的正上方,这样能够将倾斜转动状态下锅体1流出菜汁进行阻挡,当翻炒后机械手回正锅体1,菜汁能够完全回到锅内。
19.实施例1:
20.如图2所示,挡汁结构5包括挡板51和若干个重力球52,若干个重力球52连接在位于滑槽4内的挡板51底部,挡板51为弧形,因此若干个重力球52排列设置在挡板51底部,如图3所示,滑槽4的底部设有与重力球52配合的球槽6(球槽6的口径小于重力球52的直径),当机械手开始炒菜时,将锅体1倾斜,此时挡板51和重力球52会向滑槽4外滑出一定位置以使重力球52脱离球槽6,此时转动锅体1,在重力球52重力的作用下,挡板51可以实现相对于锅体1滑动始终位于锅口3的下边沿处,而位于滑槽4内的挡板51上还设有用于限位挡板51脱离滑槽4的限位条7,当翻炒结束时,机械手将锅体1立起,重力球52带动挡板51向下运动,重力球52重新落入到下方的球槽6内,此时挡板51的位置受到限制。
21.挡板51竖直在滑槽4上,挡板51朝向锅口3一侧设有与锅口3相通的引导槽8,这样能够在锅体1转动时相对滑动,以使挡板51始终位于锅体1的下端边沿,这样能够将倾斜转动状态下锅体1流出的菜汁阻挡在挡板51的引导槽8内。
22.如图1所示,锅体1的内侧壁靠近锅口3处设有用于翻菜的分隔板9,若锅体1的内侧壁是光滑的,则锅体1转动时,锅体1内部的菜始终是一个面贴着锅体1内侧面,除非锅体1转动速度过快,但是机械手自动炒菜时,锅体1不能转动速度过快,因为转速过快,菜容易飞出锅口3外,因此设置分隔板9,锅体1转动时,菜落在分隔板9的一面时,继续转动,菜从分隔板9上落下实现翻面,且锅体1内侧壁上绕设有若干条用于避免菜与锅体1内侧壁粘贴的突条11,突条11主要是防止菜粘锅,且也能辅助翻菜和提高菜熟的效率。
23.如图1所示,当翻炒完毕时,需要将菜倒出,常规的锅都是内侧面光滑的,菜汁容易一次性全部倒出导致控制不好倒在盘外,因此在锅口3的边沿处设有若干个沿锅体1内侧壁向下延伸的引流槽10,倾斜锅体1至一定角度时,菜汁会从引流槽10内流出。
24.实施例2:
25.如图2所示,挡汁结构5包括挡板51和若干个重力球52,若干个重力球52连接在位于滑槽4内的挡板51底部,挡板51为弧形,因此若干个重力球52排列设置在挡板51底部,滑槽4的底部还可以设置电磁组件,通过机械手给予电磁组件供电,当机械手与连接套2连接时,机械手上的插头插设在连接套2的插座上,机械手可以控制供电和关电,当供电时,电磁组件中的电磁体能够吸住重力球52,以实现对挡板51的限制,当关电时,电磁组件中的电磁铁没有磁力无法吸住重力球52,重力球52在重力的作用下,挡板51可以实现相对于锅体1滑动始终位于锅口3的下边沿处。
26.挡板51竖直在滑槽4上,挡板51朝向锅口3一侧设有与锅口3相通的引导槽8,这样能够在锅体1转动时相对滑动,以使挡板51始终位于锅体1的下端边沿,这样能够将倾斜转动状态下锅体1流出的菜汁阻挡在挡板51的引导槽8内。
27.如图1所示,锅体1的内侧壁靠近锅口3处设有用于翻菜的分隔板9,若锅体1的内侧壁是光滑的,则锅体1转动时,锅体1内部的菜始终是一个面贴着锅体1内侧面,除非锅体1转动速度过快,但是机械手自动炒菜时,锅体1不能转动速度过快,因为转速过快,菜容易飞出锅口3外,因此设置分隔板9,锅体1转动时,菜落在分隔板9的一面时,继续转动,菜从分隔板9上落下实现翻面,且锅体1内侧壁上绕设有若干条用于避免菜与锅体1内侧壁粘贴的突条11,突条11主要是防止菜粘锅,且也能辅助翻菜和提高菜熟的效率。
28.如图1所示,当翻炒完毕时,需要将菜倒出,常规的锅都是内侧面光滑的,菜汁容易一次性全部倒出导致控制不好倒在盘外,因此在锅口3的边沿处设有若干个沿锅体1内侧壁向下延伸的引流槽10,倾斜锅体1至一定角度时,菜汁会从引流槽10内流出。
29.工作原理:机械手与锅体1底部的连接套2固定连接,当需要翻炒时,机械手将锅体1倾斜放在火源上转动翻炒,挡板51在锅体1转动时相对滑动,以使挡板51始终位于锅体1的下端边沿对锅体1流出的菜汁进行阻挡,锅体1转动时,菜落在分隔板9的一面上,继续转动,菜从分隔板9上落下实现翻面。
30.以上仅是本实用新型的优选实施方式,本实用新型的保护范围并不仅局限于上述实施例,凡属于本实用新型思路下的技术方案均属于本实用新型的保护范围。应当指出,对于本技术领域的普通技术人员来说,在不脱离本实用新型原理前提下的若干改进和润饰,这些改进和润饰也应视为本实用新型的保护范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1