一种枕头的制作方法
1.本发明涉及一种枕头,尤其是一种能改变高度的枕头。
背景技术:
2.专利cn2020111964449和cn2020205867790分别公开了两种能改变高度的枕头,两种方案都采用了两根等长连杆x型铰接成的升降机构,升降机构布置在枕头内部。
3.上述方案中枕头的最低高度受到升降机构结构的限制,不能降到很低,对于颈椎病患者等需要低枕高的使用者不适用。
技术实现要素:
4.本发明的目的是提供一种能改变高度的枕头。
5.本发明的枕头包括至少一底板和至少一枕板,底板的一侧布置有至少一立柱,所述立柱上布置有至少一升降装置;包括至少一托臂,升降装置与托臂连接,托臂能承托枕板;升降装置能够带动托臂升降以带动枕板升降。所述立柱能布置在枕头的远离人体的一侧,布置在底板的侧边,不是布置在底板和枕板之间。立柱也能布置在枕头的左侧和/或右侧。立柱的数量能为二个或二个以上,不同立柱上的升降装置能够异步升降以改变枕板的左右倾斜角度。升降装置能包括丝杠,能包括拉线、滑轮,能包括链条,能包括液压动作筒。立柱和升降装置布置在底板和枕板之间空间以外的位置,立柱和升降装置布置在枕板在底板上投影区域以外的位置。托臂布置在枕板下方。立柱和升降装置布置在枕板的侧方,而不是下方。优选立柱与枕板平面垂直,升降装置的升降运动路线与枕板垂直。
6.托臂与枕板间能铰接。托臂与枕板间能布置有居中机构。居中机构是公知技术。托臂能够通过倾转装置与升降装置连接,所述倾转装置能够倾转托臂的角度以改变枕板的前后倾斜角度。倾转装置能包括涡轮蜗杆,能包括液压动作筒,能包括丝杠、滑块。
7.本发明的枕头因为采用了新型的结构和升降装置,所以最低高度能降到非常低。
附图说明
8.图1是本发明枕头一个实施例的示意图;
9.图2是图1实施例的正视图;
10.图3是本发明枕头一个实施例的示意图;
11.图4是图3实施例的正视图;
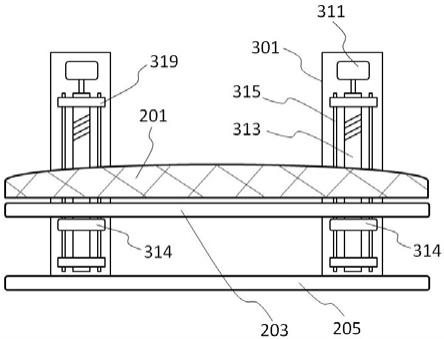
12.图5是本发明枕头的升降装置一个实施例的示意图;
13.图6是图5中实施例的侧视图;
14.图7是本发明枕头的升降装置一个实施例的示意图;
15.图8是本发明枕头的升降装置一个实施例的示意图;
16.图9是本发明枕头的一种枕板与托臂连接结构示意图;
17.图10是本发明枕头的托臂的倾转装置示意图;
18.图11是本发明枕头的托臂倾转装置一个实施例示意图;
19.图12是本发明枕头的托臂倾转装置一个实施例示意图;
20.图13是本发明枕头的一个实施例示意图;
21.附图中相同的编号代表相同或相近的组成部分。
具体实施方式
22.图1中,枕头包括至少一底板205,底板能放在床面上,对枕头起到支撑作用。底板为刚性。枕头包括至少一枕板203,枕板为刚性或半刚性。枕板203上能布置至少一枕垫201,枕垫优选柔性材料制成,人的头1能枕在枕垫201上。枕头包括至少一立柱301,优选包括二个立柱。立柱布置在人的头顶侧。立柱为刚性结构,立柱301与底板205固定连接,优选立柱垂直于底板。立柱的横截面能是圆形或矩形或其它形状,立柱能是实心的或空心的。立柱301上布置有至少一升降装置3,升降装置3与枕板203连接,升降装置能带动枕板上下移动。升降装置3向上移动时,枕板203上升,人的头1被抬高。升降装置3向下移动时,枕板203下降,人的头1被降低。
23.图2是图1中枕头的正视图,枕头包括二个立柱301,每个立柱301上都布置有升降装置3。立柱301与底板205固连,升降装置3布置在立柱301上,枕板203与升降装置3固定连接或非固定连接,升降装置3能带动枕板203升降。枕板203上布置有枕垫201,头枕在枕垫上。当人枕在枕头上时,升降装置能根据控制信号带动枕板203升降,以调节头的高度。例如根据人的睡姿信息控制升降装置上升/下降,调整枕板的高度,该技术是公知技术。升降装置的控制信号包括上升、下降、停止,升降装置能包括位移测量模块,位移测量模块能够测量枕板与底板之间的距离以确定枕板的高度。控制信号能由睡姿判断模块产生,睡姿判断模块能确定人的睡姿,并计算出该睡姿时人的头部最适宜的高度,能把枕板当前的高度与人在当前睡姿时头部的最适宜高度进行比较,如果枕板高度或枕垫高度高于最适宜高度,则升降装置带动枕板下降,如果枕板或枕垫高度低于最适宜高度,则升降装置带动枕板上升,以使人的头部高度处于最适宜高度范围内。该技术是公知技术。
24.图3中,人的头1枕在枕垫201上,枕垫201布置在枕板203上,两个立柱301分别布置在枕头的左右两侧,即头的两侧。立柱301与底板205连接。立柱301包括至少一升降装置3。升降装置3与枕板203连接,能带动枕板203上下移动。
25.图4是图3中枕头的正视图。立柱301布置在枕头的左右两侧,底板205左侧布置至少一立柱301,底板205右侧布置至少一立柱301。立柱与底板间固定连接。升降装置3布置在立柱301上,升降装置3与枕板203连接,升降装置能带动枕板203升降。枕头左侧的升降装置和枕头右侧的升降装置能同步上升/下降,也能异步升降。当左右侧的升降装置距离底板高度不相同时,枕板203左右倾斜。枕板203的右侧端与右侧的升降装置间通过铰链连接,枕板能相对升降装置转动。枕板203的左侧端与左侧的升降装置间能采用铰接,枕板203能向左右方向伸长。这样当左右两侧升降装置与底板不平行时,枕板能伸长以补偿左右升降装置连接点之间的距离变化。枕板203的左侧端与左侧升降装置间能采用滑动连接,枕板左侧搭在升降装置上,枕板能相对于左侧升降装置滑动。当左右升降装置高度不同时,枕板左侧相对于左侧升降装置产生滑移,以补偿左右距离的变化。枕板能绕左右升降装置与枕板连接点的连线转动,使枕板产生前后的倾斜。枕板与升降机构间能布置蜗轮蜗杆角度调节装置。
26.图5中,两个立柱301固连在底板205远离人体一侧,立柱上布置有丝杠滑轨升降装置。丝杠滑轨升降装置包括丝杠313、滑轨315、支座319。立柱的上端和下端分别布置有支座319,丝杠313和滑轨315布置在上下支座间,丝杠能相对于支座转动。托臂314上有一螺孔,螺孔内有螺纹,该螺纹与丝杠上的螺纹啮合。托臂314上有通孔,滑轨315穿过通孔。当丝杠313转动时,因为滑轨315限制了托臂314转动,所以托臂只能沿丝杠/滑轨上下移动。丝杠滑轨升降装置是公知技术。枕板203布置在托臂上,左右两个托臂承托枕板,枕板上布置有枕垫201。丝杠313与电机311连接,电机311能带动丝杠转动。电机311能接受控制装置传递的控制信号,根据控制信号正转、反转或停止。左右两个电机311能同步转动,也能异步转动。当左右两个电机带动左右两个丝杠同步上升/下降时,枕板也同时上升/下降,实现对枕头高度的调整。
27.图6是图5中枕头的侧视图。枕板203布置在托臂314上。托臂314与丝杠313螺接,托臂314与滑轨315滑接。当丝杠313在电机311的带动下转动时,托臂314能沿丝杠313上下滑动,进而带动枕板203和枕垫201升降。
28.图7中,两个立柱301固连在底板205远离人体一侧,立柱上布置有滑轮升降装置。滑轮升降装置包括电机321、卷扬轮323、拉线324、滑轮325、支座319、托臂314、滑轨315。拉线优选钢丝绳,滑轮能包括多个。拉线324的一端与托臂314固连,另一端缠绕在卷扬轮323上。当电机321带动卷扬轮323转动时,卷扬轮绕紧或放松钢丝绳,钢丝绳经过滑轮325的转向,带动托板314上升或下降。托板314上布置有至少二个通孔,至少二个滑轨315穿过通孔,托板314在滑轨的限制下,只能沿滑轨上下移动。通孔内能布置滑动轴承或轴套,滑轨穿过滑动轴承或轴套。电机321布置在支座328上,支座328与支柱301固连。能够用链条和链轮代替滑轮升降装置中的拉线、滑轮和卷扬轮。链条的一端与托臂连接,另一端与链轮连接,电机能带动链轮转动进而通过链条带动托臂升降。
29.图8中,立柱301上布置有液压升降装置。液压动作筒331的筒体与支座319连接,液压动作筒331的推杆与托臂314连接。支座319与立柱301固连。液压动作筒331能够伸缩,带动托臂314沿滑轨315滑动实现枕头高度的调节。液压动作筒通过液压管路、控制阀门与液压泵连接,液压泵和控制阀门能在控制信号的控制下开启/关闭。
30.图9中,枕板203的一侧/右侧通过铰链401与托臂314连接,铰链401能够绕垂直于图片平面的轴线摆动。枕板另一侧/左侧与托臂314间布置有滚轮403,滚轮转动轴线垂直于图片平面,滚轮轴穿过支架,滚轮的支架与托臂固连,滚轮能够绕轴相对于托臂转动。当左右两侧的升降装置不同步升降时,左右两侧托臂与底板205间距离不同,枕板203倾斜。此时枕板203的右端能绕铰链401摆动,枕板203的左端能沿滚轮403滑动,以补偿滚轮403与铰链401之间的距离的变化。枕头左右两侧升降装置能异步升降,以倾斜枕板,使枕板左右两侧高度不同。枕板左右倾斜能够使枕在枕头上的人的头产生左右摆动,能够调整头部位置和角度,进而调整颈部的位置/角度,能减弱或消除打鼾/睡眠中呼吸暂停。
31.图10中,丝杠313上布置有滑块316,滑块316与丝杠螺接,滑轨穿过滑块316,丝杠转动,能带动滑块316升降。滑块316和托臂314间布置有倾转装置5。倾转装置5能够绕轴转动,改变托臂314的角度,使托臂带动枕板203和枕垫201发生沿头部纵向的倾斜。当托臂314的自由端向上倾斜时,人的头部后仰,当托臂314的自由端向下倾斜时,头部前倾。倾转装置5的转动轴线垂直于图片平面,托臂能围绕倾转装置的轴线转动。
32.图11是一种包括了涡轮蜗杆机构的倾转装置。倾转装置包括蜗杆501、涡轮503。蜗杆501与涡轮503啮合。蜗杆支架507与滑块316固连,蜗杆穿过蜗杆支架,蜗杆与电机连接。涡轮503套在涡轮轴505上,涡轮轴505与滑块316连接,蜗杆501转动时能带动涡轮503绕涡轮轴505转动。托臂314与涡轮503固连,涡轮503转动能带动托臂314绕涡轮轴505倾转。控制装置通过控制信号控制电机带动蜗杆正转、反转或停止,蜗杆带动涡轮转动,涡轮带动托臂向上倾转、向下倾转或保存静止。
33.图12是一种包括了液压动作筒的倾转装置。倾转装置包括液压动作筒517、转轴座513、转轴515。液压动作筒517的筒体通过支座与滑块316连接,推杆通过支座与托臂314连接。托臂314与转轴515固连,转轴座513与滑块316固连。当液压动作筒517伸缩时,能带动托臂314绕转轴515倾转,实现对枕板倾斜角度的调节。能用丝杠和螺母滑块代替液压动作筒。利用丝杠和螺母滑块实现部件间距离的改变是公知技术。丝杠座能固定在滑块316上,与电机连接,螺母滑块布置在托臂上。丝杠座能相对于滑块316摆动,螺母滑块能相对于托臂摆动。丝杠转动时,螺母滑块能沿丝杠滑移,使与螺母滑块连接的托臂314倾转。
34.图13中,枕板203与托臂314间布置有居中机构。枕板和托臂通过至少二个连杆421连接,连杆的两端分别与枕板和托臂铰接,连杆能相对于枕板摆动。居中机构包括中心轴423、横连杆425、至少二个斜连杆427。当左右两个升降装置不同步升降时,左右两个托臂与底板的距离不同,托臂间的距离变大,此时枕板左右倾斜,连杆421发生倾转,以补偿托臂间距离的变化。居中机构能保持枕板的中心始终处于左右托臂间连线的中点,枕板不会左右晃动。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1