一种自动避障智能机器人的制作方法
1.本发明涉及智能机器人技术领域,特别涉及一种自动避障智能机器人。
背景技术:
2.智能机器人之所以叫智能机器人,这是因为它有相当发达的“大脑”。在脑中起作用的是中央处理器,这种计算机跟操作它的人有直接的联系。最主要的是,这样的计算机可以进行按目的安排的动作。正因为这样,我们才说这种机器人才是真正的机器人,尽管它们的外表可能有所不同,我们从广泛意义上理解所谓的智能机器人,它给人的最深刻的印象是一个独特的进行自我控制的“活物”。其实,这个自控“活物”的主要器官并没有像真正的人那样微妙而复杂。智能机器人具备形形色色的内部信息传感器和外部信息传感器,如视觉、听觉、触觉、嗅觉。除具有感受器外,它还有效应器,作为作用于周围环境的手段。这就是筋肉,或称自整步电动机,它们使手、脚、长鼻子、触角等动起来。由此也可知,智能机器人至少要具备三个要素:感觉要素,反应要素和思考要素。我们称这种机器人为自控机器人,以便使它同前面谈到的机器人区分开来。它是控制论产生的结果,控制论主张这样的事实:生命和非生命有目的的行为在很多方面是一致的。正像一个智能机器人制造者所说的,机器人是一种系统的功能描述,这种系统过去只能从生命细胞生长的结果中得到,它们已经成了我们自己能够制造的东西了。智能机器人能够理解人类语言,用人类语言同操作者对话,在它自身的“意识”中单独形成了一种使它得以“生存”的外界环境——实际情况的详尽模式。它能分析出现的情况,能调整自己的动作以达到操作者所提出的全部要求,能拟定所希望的动作,并在信息不充分的情况下和环境迅速变化的条件下完成这些动作。
3.现有技术的自动避障智能机器人大多借助单一的避障探测结构进行探测避障,如视觉传感器的探测避障或超声波传感器以及红外传感器之类的探测组件进行探测,在探测后借助遗传算法或者势场算法等算法进行计算处理,从而实现自动避障智能机器人的自动信息采集处理避障,此种自动避障智能机器可以在智能家居清扫机器人等领域使用,而单一的避障探测结构在遭遇干扰或突发故障时会影响智能机器人的算法数据,不能较好的保障自动避障智能机器人的自动避障安全性,同时单一的避障探测结构的自动智能避障机器人采集的环境数据信息不全面,不利于自动避障智能机器人的算法数据的准确性,并且自动避障智能机器人的的视觉传感器处缺乏补光性的结构,进而自动避障智能机器人运行到黑暗环境中时,视觉传感器处缺乏较好的光源导致视觉传感器在采集环境数据时会受到影响,为此,我们提出一种自动避障智能机器人。
技术实现要素:
4.本发明的主要目的在于提供一种自动避障智能机器人,在智能机器人本体的顶端和外侧分别设置有视觉避障机构和接触避障机构,将固定盘底端的定位块向下嵌入智能机器人本体表面的定位槽内进行定位,此时智能机器人本体处的圆孔a和固定盘处的圆孔b竖向互通,并且视觉传感器外侧基盘处的螺孔c与固定盘表面的螺孔b以及智能机器人本体外
侧的螺孔a竖向互通,然后将视觉传感器的线路从圆孔b和圆孔a处送入智能机器人本体内进行接线,而补光灯和光度传感器处的线路则可以从通孔并沿着圆孔b和圆孔a处送入智能机器人本体内进行接线,此时将紧固螺栓从基盘处的螺孔c旋入,并使紧固螺栓的栓体从螺孔c旋入固定盘表面的螺孔b以及智能机器人本体外侧的螺孔a内进行旋接锁紧固定,碰撞传感器可以从柱孔的孔底处对智能机器人本体外壁进行开孔并接线,而碰撞传感器在柱孔处安装有可以将弧形板表面的弧形胶块a和弧形胶块b与智能机器人本体外壁进行粘接固定,此时弧形板中部的压柱则嵌入柱孔内接触碰撞传感器,而补光机构的安装板与视觉传感器之间的螺纹孔内可以旋接螺纹钉进行锁紧固定,此时补光灯和光度感应器可以借助螺钉锁紧在安装板处进行安装,智能机器人本体顶端的视觉传感器可以借助采集镜头获取外部环境图像信息并输入智能机器人本体的控制器处借助智能机器人本体内置的算法进行处理,在获得环境信息后智能机器人本体有环境数据支持可以进行避障,而智能机器人本体外侧的接触避障机构处有弧形板可以代替智能机器人本体接触外部物体,弧形板接触碰撞到外部物体时产生压力压迫弧形胶块a和弧形胶块b变形弹性收缩,此时压柱也受力压迫碰撞传感器,碰撞传感器接受数据后可以将碰撞数值送入智能机器人本体的控制器内进行处理记录,以便智能机器人本体进行位置学习避障,此种双采集端的智能机器人本体在其中一组采集结构故障时仍可正常避障运转,并且智能机器人本体运转到光线昏暗的场所时,光度感应器识别四周环境的光度,以便控制补光灯进行通电补光,从而实现了智能机器人本体的较好数据采集避障,可以有效解决背景技术中的问题。
5.为实现上述目的,本发明采取的技术方案为:
6.一种自动避障智能机器人,包括智能机器人本体,还包括视觉避障机构、接触避障机构和补光机构,所述视觉避障机构由圆孔a、螺孔a、定位槽、固定盘、定位块、圆孔b、螺孔b、视觉传感器、采集镜头、基盘、螺孔c和紧固螺栓构成,所述智能机器人本体的顶端开设有圆孔a,且圆孔a外侧的智能机器人本体表面开设有螺孔a,所述螺孔a外侧的智能机器人本体表面开设有定位槽,且定位槽上方的固定盘处向下凸起有定位块,所述定位块之间的固定盘表面开设有螺孔b,且螺孔b之间的固定盘处开设有圆孔b,所述固定盘的表面贴合有视觉传感器,且视觉传感器的表面一侧伸出有采集镜头,所述采集镜头下方的视觉传感器底端设置有基盘,且基盘的表面开设有螺孔c,所述螺孔c、螺孔b和螺孔a之间螺纹旋接有紧固螺栓,所述智能机器人本体的外侧设置有接触避障机构,且接触避障机构由柱孔、碰撞传感器、压柱、弧形板、弧形胶块a和弧形胶块b构成,所述智能机器人本体的外侧壁处开设有柱孔,且柱孔的孔底内安装有碰撞传感器,所述碰撞传感器外侧的柱孔内嵌入有压柱,且压柱固定连接于弧形板的中部,所述弧形板的表面与智能机器人本体之间固定有弧形胶块a和弧形胶块b,所述视觉传感器的顶端安装有补光机构,且补光机构由安装板、通孔、螺纹孔、螺纹钉、补光灯和光度感应器构成,所述视觉传感器、碰撞传感器、补光灯和光度感应器的电源端与智能机器人本体内部的电源端电性连接,且视觉传感器、碰撞传感器和光度感应器的数据端与智能机器人本体内部数据处理端相连接。
7.进一步地,所述视觉传感器的顶端贴合有安装板,且视觉传感器的顶端和安装板的表面处开设有竖向互通的通孔和螺纹孔,所述视觉传感器和安装板之间的螺纹孔处螺纹旋接有螺纹钉,且安装板的表面可拆卸连接有补光灯和光度感应器。
8.进一步地,所述压柱外侧的弧形板上下端表面粘接有弧形胶块b和弧形胶块a,且
弧形胶块b和弧形胶块a粘接于智能机器人本体的外侧,所述弧形板借助弧形胶块b和弧形胶块a在智能机器人本体的外侧对称粘接有两组;弧形板与智能机器人本体之间粘接弧形胶块b和弧形胶块a进行连接,而弧形板的两组板体在智能机器人本体外侧粘接固定后起到一定的防碰撞保护作用,可以对智能机器人本体进行保护。
9.进一步地,所述弧形胶块b和弧形胶块a的材质为橡胶材质,且弧形胶块b和弧形胶块a的胶块中部开设有气孔;橡胶材质的弧形胶块b和弧形胶块a中部带有气孔,当弧形板受碰撞导致弧形胶块b和弧形胶块a变形时,弧形胶块b和弧形胶块a可以变形产生一定的弹性缓冲能力。
10.进一步地,所述圆孔a的底端孔孔开设于智能机器人本体的内壁处,所述通孔的底端孔口与视觉传感器的壳腔竖向互通;圆孔a处的智能机器人本体可以伸入外部线路进行接线,而视觉传感器的通孔处也可以伸入外部线路进行接线。
11.与现有技术相比,本发明具有如下有益效果:
12.本发明通过在智能机器人本体的顶端和外侧分别设置有视觉避障机构和接触避障机构,将固定盘底端的定位块向下嵌入智能机器人本体表面的定位槽内进行定位,此时智能机器人本体处的圆孔a和固定盘处的圆孔b竖向互通,并且视觉传感器外侧基盘处的螺孔c与固定盘表面的螺孔b以及智能机器人本体外侧的螺孔a竖向互通,然后将视觉传感器的线路从圆孔b和圆孔a处送入智能机器人本体内进行接线,而补光灯和光度传感器处的线路则可以从通孔并沿着圆孔b和圆孔a处送入智能机器人本体内进行接线,此时将紧固螺栓从基盘处的螺孔c旋入,并使紧固螺栓的栓体从螺孔c旋入固定盘表面的螺孔b以及智能机器人本体外侧的螺孔a内进行旋接锁紧固定,碰撞传感器可以从柱孔的孔底处对智能机器人本体外壁进行开孔并接线,而碰撞传感器在柱孔处安装有可以将弧形板表面的弧形胶块a和弧形胶块b与智能机器人本体外壁进行粘接固定,此时弧形板中部的压柱则嵌入柱孔内接触碰撞传感器,而补光机构的安装板与视觉传感器之间的螺纹孔内可以旋接螺纹钉进行锁紧固定,此时补光灯和光度感应器可以借助螺钉锁紧在安装板处进行安装,智能机器人本体顶端的视觉传感器可以借助采集镜头获取外部环境图像信息并输入智能机器人本体的控制器处借助智能机器人本体内置的算法进行处理,在获得环境信息后智能机器人本体有环境数据支持可以进行避障,而智能机器人本体外侧的接触避障机构处有弧形板可以代替智能机器人本体接触外部物体,弧形板接触碰撞到外部物体时产生压力压迫弧形胶块a和弧形胶块b变形弹性收缩,此时压柱也受力压迫碰撞传感器,碰撞传感器接受数据后可以将碰撞数值送入智能机器人本体的控制器内进行处理记录,以便智能机器人本体进行位置学习避障,此种双采集端的智能机器人本体在其中一组采集结构故障时仍可正常避障运转,并且智能机器人本体运转到光线昏暗的场所时,光度感应器识别四周环境的光度,以便控制补光灯进行通电补光,从而实现了智能机器人本体的较好数据采集避障。
附图说明
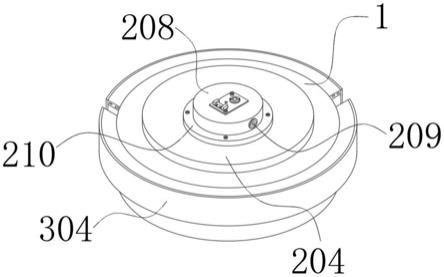
13.图1为本发明一种自动避障智能机器人的整体结构示意图。
14.图2为本发明一种自动避障智能机器人的视觉避障机构爆炸图。
15.图3为本发明一种自动避障智能机器人的接触避障机构爆炸图。
16.图4为本发明一种自动避障智能机器人的补光机构爆炸图。
17.图5为本发明一种自动避障智能机器人的固定盘结构示意图。
18.图中:1、智能机器人本体;2、视觉避障机构;201、圆孔a;202、螺孔a;203、定位槽;204、固定盘;205、定位块;206、圆孔b;207、螺孔b;208、视觉传感器;209、采集镜头;210、基盘;211、螺孔c;212、紧固螺栓;3、接触避障机构;301、柱孔;302、碰撞传感器;303、压柱;304、弧形板;305、弧形胶块a;306、弧形胶块b;4、气孔;5、补光机构;501、安装板;502、通孔;503、螺纹孔;504、螺纹钉;505、补光灯;506、光度感应器。
具体实施方式
19.为使本发明实现的技术手段、创作特征、达成目的与功效易于明白了解,下面结合具体实施方式,进一步阐述本发明。
20.如图1-5所示,一种自动避障智能机器人,包括智能机器人本体1,还包括视觉避障机构2、接触避障机构3和补光机构5,所述视觉避障机构2由圆孔a201、螺孔a202、定位槽203、固定盘204、定位块205、圆孔b206、螺孔b207、视觉传感器208、采集镜头209、基盘210、螺孔c211和紧固螺栓212构成,所述智能机器人本体1的顶端开设有圆孔a201,且圆孔a201外侧的智能机器人本体1表面开设有螺孔a202,所述螺孔a202外侧的智能机器人本体1表面开设有定位槽203,且定位槽203上方的固定盘204处向下凸起有定位块205,所述定位块205之间的固定盘204表面开设有螺孔b207,且螺孔b207之间的固定盘204处开设有圆孔b206,所述固定盘204的表面贴合有视觉传感器208,且视觉传感器208的表面一侧伸出有采集镜头209,所述采集镜头209下方的视觉传感器208底端设置有基盘210,且基盘210的表面开设有螺孔c211,所述螺孔c211、螺孔b207和螺孔a202之间螺纹旋接有紧固螺栓212,所述智能机器人本体1的外侧设置有接触避障机构3,且接触避障机构3由柱孔301、碰撞传感器302、压柱303、弧形板304、弧形胶块a305和弧形胶块b306构成,所述智能机器人本体1的外侧壁处开设有柱孔301,且柱孔301的孔底内安装有碰撞传感器302,所述碰撞传感器302外侧的柱孔301内嵌入有压柱303,且压柱303固定连接于弧形板304的中部,所述弧形板304的表面与智能机器人本体1之间固定有弧形胶块a305和弧形胶块b306,所述视觉传感器208的顶端安装有补光机构5,且补光机构5由安装板501、通孔502、螺纹孔503、螺纹钉504、补光灯505和光度感应器506构成,所述视觉传感器208、碰撞传感器302、补光灯505和光度感应器506的电源端与智能机器人本体1内部的电源端电性连接,且视觉传感器208、碰撞传感器302和光度感应器506的数据端与智能机器人本体1内部数据处理端相连接。
21.其中,所述视觉传感器208的顶端贴合有安装板501,且视觉传感器208的顶端和安装板501的表面处开设有竖向互通的通孔502和螺纹孔503,所述视觉传感器208和安装板501之间的螺纹孔503处螺纹旋接有螺纹钉504,且安装板501的表面可拆卸连接有补光灯505和光度感应器506。
22.其中,所述压柱303外侧的弧形板304上下端表面粘接有弧形胶块b306和弧形胶块a305,且弧形胶块b306和弧形胶块a305粘接于智能机器人本体1的外侧,所述弧形板304借助弧形胶块b306和弧形胶块a305在智能机器人本体1的外侧对称粘接有两组;弧形板304与智能机器人本体1之间粘接弧形胶块b306和弧形胶块a305进行连接,而弧形板304的两组板体在智能机器人本体1外侧粘接固定后起到一定的防碰撞保护作用,可以对智能机器人本体1进行保护。
23.其中,所述弧形胶块b306和弧形胶块a305的材质为橡胶材质,且弧形胶块b306和弧形胶块a305的胶块中部开设有气孔4;橡胶材质的弧形胶块b306和弧形胶块a305中部带有气孔4,当弧形板304受碰撞导致弧形胶块b306和弧形胶块a305变形时,弧形胶块b306和弧形胶块a305可以变形产生一定的弹性缓冲能力。
24.其中,所述圆孔a201的底端孔孔开设于智能机器人本体1的内壁处,所述通孔502的底端孔口与视觉传感器208的壳腔竖向互通;圆孔a201处的智能机器人本体1可以伸入外部线路进行接线,而视觉传感器208的通孔502处也可以伸入外部线路进行接线。
25.需要说明的是,本发明为一种自动避障智能机器人,在智能机器人本体1的顶端和外侧分别设置有视觉避障机构2和接触避障机构3,将固定盘204底端的定位块205向下嵌入智能机器人本体1表面的定位槽203内进行定位,此时智能机器人本体1处的圆孔a201和固定盘204处的圆孔b206竖向互通,并且视觉传感器208外侧基盘210处的螺孔c211与固定盘204表面的螺孔b207以及智能机器人本体1外侧的螺孔a202竖向互通,然后将视觉传感器208的线路从圆孔b206和圆孔a201处送入智能机器人本体1内进行接线,而补光灯505和光度传感器506处的线路则可以从通孔502并沿着圆孔b206和圆孔a201处送入智能机器人本体1内进行接线,此时将紧固螺栓212从基盘210处的螺孔c211旋入,并使紧固螺栓212的栓体从螺孔c211旋入固定盘204表面的螺孔b207以及智能机器人本体1外侧的螺孔a202内进行旋接锁紧固定,碰撞传感器302可以从柱孔301的孔底处对智能机器人本体1外壁进行开孔并接线,而碰撞传感器302在柱孔301处安装有可以将弧形板304表面的弧形胶块a305和弧形胶块b306与智能机器人本体1外壁进行粘接固定,此时弧形板304中部的压柱303则嵌入柱孔301内接触碰撞传感器302,而补光机构5的安装板501与视觉传感器208之间的螺纹孔503内可以旋接螺纹钉504进行锁紧固定,此时补光灯505和光度感应器506可以借助螺钉锁紧在安装板501处进行安装,智能机器人本体1顶端的视觉传感器208可以借助采集镜头209获取外部环境图像信息并输入智能机器人本体1的控制器处借助智能机器人本体1内置的算法进行处理,在获得环境信息后智能机器人本体1有环境数据支持可以进行避障,而智能机器人本体1外侧的接触避障机构3处有弧形板304可以代替智能机器人本体1接触外部物体,弧形板304接触碰撞到外部物体时产生压力压迫弧形胶块a305和弧形胶块b306变形弹性收缩,此时压柱303也受力压迫碰撞传感器302,碰撞传感器302接受数据后可以将碰撞数值送入智能机器人本体1的控制器内进行处理记录,以便智能机器人本体1进行位置学习避障,此种双采集端的智能机器人本体1在其中一组采集结构故障时仍可正常避障运转,并且智能机器人本体1运转到光线昏暗的场所时,光度感应器506识别四周环境的光度,以便控制补光灯505进行通电补光,从而实现了智能机器人本体1的较好数据采集避障。
26.需要说明的是,本发明为一种自动避障智能机器人,包括1、智能机器人本体;2、视觉避障机构;201、圆孔a;202、螺孔a;203、定位槽;204、固定盘;205、定位块;206、圆孔b;207、螺孔b;208、视觉传感器;209、采集镜头;210、基盘;211、螺孔c;212、紧固螺栓;3、接触避障机构;301、柱孔;302、碰撞传感器;303、压柱;304、弧形板;305、弧形胶块a;306、弧形胶块b;4、气孔;5、补光机构;501、安装板;502、通孔;503、螺纹孔;504、螺纹钉;505、补光灯;506、光度感应器,部件均为通用标准件或本领域技术人员知晓的部件,其结构和原理都为本技术人员均可通过技术手册得知或通过常规实验方法获知。
27.以上显示和描述了本发明的基本原理和主要特征和本发明的优点。本行业的技术
人员应该了解,本发明不受上述实施例的限制,上述实施例和说明书中描述的只是说明本发明的原理,在不脱离本发明精神和范围的前提下,本发明还会有各种变化和改进,这些变化和改进都落入要求保护的本发明范围内。本发明要求保护范围由所附的权利要求书及其等效物界定。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1