自移动地面清洁装置的制作方法
1.本发明涉及清洁装置技术领域,尤其是一种自移动地面清洁装置。
背景技术:
2.现有技术中具有一类能够擦拭待清洁表面的自移动地面清洁装置,其包括机器人本体,该机器人本体具有能够利用清洁流体擦拭待清洁表面的刷辊。然而,若刷辊的轴向长度较短,则该自移动地面清洁装置在进行清洁作业时需要较多次数多折返以覆盖整个待清洁表面,在这一定程度上降低了该自移动地面清洁装置的清洁效率与能源利用率。此外,由于刷辊的轴向长度小于机器人本体的最大宽度,这使得该类自移动地面清洁装置在擦拭待清洁表面时,存在墙角、桌角等处的清洁盲区,需要用户进行二次清洁。
技术实现要素:
3.针对上述的相关技术问题,本发明的目的是提供一种刷辊轴向长度与机器人本体最大宽度等长的自移动清洁装置。
4.为了达到上述的目的,本发明提供以下技术方案:一种自移动地面清洁装置,包括机器人本体,所述的机器人本体具有:移动系统,用于使所述自移动地面清洁装置自主地在待清洁表面上移动,所述的移动系统包括一对主动轮; 干式吸尘系统,用于产生工作气流以从待清洁表面去除污物并且将所述的污物储存在第一收集空间中,所述的干式吸尘系统包括面向待清洁表面的吸口、与所述吸口流体连通的集尘盒以及吸尘电机,所述的集尘盒提供所述的第一收集空间;和湿式擦地系统,能够利用清洁流体擦拭待清洁表面、从待清洁表面回收使用过的清洁流体以及在第二收集空间中储存回收的所述使用过的清洁流体;所述的湿式拖地系统包括流体供应机构、擦地机构以及污液回收机构,所述的污液回收机构提供所述的第二收集空间,所述的擦地机构包括刷辊组件和驱动所述刷辊组件旋转的刷辊电机;其中,所述的吸口位于所述一对主动轮的前侧,所述的刷辊组件位于所述的一对主动轮的后侧,所述的刷辊组件具有左侧端部和右侧端部,所述的左侧端部位于所述机器人本体的最左侧,所述的右侧端部位于所述机器人本体的最右侧。
5.在上述的技术方案中,优选地,所述的机器人本体包括壳体,所述的刷辊组件包括左右并排布置在所述壳体上的第一刷辊和第二刷辊,所述的左侧端部由所述的第一刷辊限定,所述的右侧端部由所述的第二刷辊限定。
6.在上述的优选方案中,进一步优选地,所述的刷辊电机为双输出电机,并且内置在所述第一刷辊与/或所述第二刷辊的内部。
7.在上述的优选方案中,进一步优选地,所述的污液回收机构包括抵接所述刷辊组件的刮辊器和毗邻所述刷辊组件的污液盒,所述的刮辊器位于所述污液盒的液体入口处,以便引导从所述刷辊组件上刮除的液体进入到所述的污液盒。还可以进一步优选地,所述的污液回收机构还包括污液回收容器和污液泵,所述的污液泵布置在所述的污液盒和所述的污液收纳容器之间,所述的污液收纳容器提供所述的第二收集空间。还可以进一步优选
地,所述的污液盒、所述的污液回收容器和所述的污液泵集成为一个组件,该组件以能取下的方式布置在所述的壳体上。还可以进一步优选地,所述的组件布置在所述壳体的最后侧。
8.在上述的优选方案中,进一步优选地,所述的自移动地面清洁装置还包括一对边刷,所述的一对边刷布置在所述壳体的底部并且分别位于所述吸口的左右两侧,所述的一对边刷均具有伸到所述壳体外侧的若干刷毛簇。
9.在上述的技术方案中,优选地,所述的左侧端部和右侧端部之间界定所述机器人本体的最大宽度,所述的一对主动轮之间的距离小于所述的最大宽度。
10.在上述的技术方案中,优选地,所述的机器人本体具有:导航系统,所述的导航系统包括多组沿墙传感器,各组所述的沿墙传感器分布在所述左侧端部和右侧端部的旁边。
11.相较于现有技术,本发明技术方案所提供的自移动清洁装置布置有刷辊组件,该刷辊组件的左侧端部位于机器人本体的最左侧并且该刷辊组件的右侧端部位于机器人本体的最右侧,由此在不增加自移动清洁装置体积大前提下最大化刷辊的轴向长度,从而提高该自移动地面清洁装置的清洁效率与能源利用率。此外,该自移动清洁装置还可利用刷辊擦拭墙角、桌角等处的待清洁表面,消除清洁盲区。
附图说明
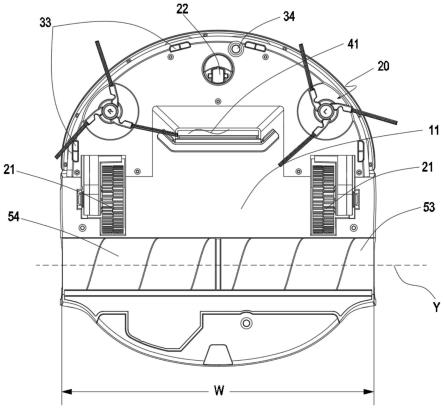
12.图1为本发明所提供的自移动地面清洁装置的立体示意图1;图2为图1所示的自移动地面清洁装置的立体示意图2;其中,上盖未被示出;图3为图1所示的自移动地面清洁装置的立体示意图3;其中,第一刷辊与第二刷辊从支架上拆卸下来;图4为图1所示的自移动地面清洁装置的俯视图;图5为图4所示的自移动地面清洁装置沿a-a处的剖视图;图6为图1所示的自移动地面清洁装置的仰视图;图7为图1所示的自移动地面清洁装置的拆卸图;图8为图1所示的自移动地面清洁装置的擦地机构的拆卸图;图9为图1所示的自移动清洁装置的组件的拆卸图。
13.附图标志:100、自移动地面清洁装置;10、机器人本体;20、边刷;30、刷毛簇;40、组件;1、壳体;11、底盖;12、上盖;121、腔;122、翻盖;123、启动开关;13、保险杠;14、辊腔;21、主动轮;22、从动轮;31、激光雷达头;32、沿墙传感器;33、跌落传感器;34、超声波传感器;41、吸口;42、集尘盒;421、第一收集空间;43、吸尘电机;51、刷辊电机;52、支架;521、悬挂件;522、减速器;523、支撑体;53、第一刷辊;54、第二刷辊;61、流体供应箱;62、流体分配器;63、流体泵;64、补液口;71、污液盒;711、上盒体;712、下盒体;713、回收腔;714、柔性刮条;715、滤网;72、刮辊器;73、污液回收容器;731、第二收集空间;732、进液管;733、液位探针;
74、污液泵;w、最大宽度。
具体实施方式
14.为详细说明本技术的技术内容、构造特征、所达成目的及功效,下面将结合本技术实施例中的附图,对本技术实施例中的技术方案进行描。
15.本技术中,诸如“在
……
之下”、“在
……
下方”、“在
……
下”、
ꢀ“
下”、“在
……
上方”、“上”、“在
……
之上”、“较高的”、“侧”(例如,如在“侧壁”中)等的空间相对术语,由此来描述如附图中示出的一个元件与另一(其它)元件的关系。空间相对术语意图包括设备在使用、操作和/或制造中除了附图中描绘的方位之外的不同方位。例如,如果附图中的设备被翻转,则被描述为“在”其它元件或特征“下方”或“之下”的元件随后将被 定位为“在”所述其它元件或特征“上方”。因此,示例性术语“在
……
下方”可以包括上方和下方两种方位。此外,设备可以被另外定位(例如,旋转90度或者在其它方位处),如此,相应 地解释在此使用的空间相对描述语。
16.图1示出了本发明所提供的自移动地面清洁装置100(以下简称清洁装置100),其能够沿着待清洁表面自移动地进行清洁作业。清洁装置100包括机器人本体10,该机器人本体10包括形成主体外轮廓的壳体1、用于实现清洁装置100自移动的移动系统、为清洁装置100提供导航的导航系统、能够产生工作气流以从待清洁表面去除污物的干式吸尘系统以及利用清洁流体擦拭待清洁表面的湿式擦地系统。
17.结合图7,壳体1包括底盖11、可拆卸地连接于底盖11的上盖12以及布置于前部的保险杠13。底盖11与上盖12共同限定有一位于内侧的容纳空间(图中未标示出),以放置清洁装置100的大部分部件。
18.上盖12上布置有向容纳空间凹陷的腔121、可翻转的翻盖122以及供用户启停该清洁装置100的启动开关123。集尘盒42(见下文)可取下地安装于该腔121内,翻盖122位于腔121的上侧并可遮盖腔121和集尘盒42。保险杠13呈弧形结构并形成壳体1前部的外周壁面,其用于缓冲清洁装置100移动时与障碍物的碰撞。其中,腔121与保险杠13均位于清洁装置100的前部区域(见下文)。
19.结合图6,移动系统包括可转动地安装于底盖11上的一对主动轮21、位于一对主动轮21前侧的从动轮22以及与布置于容纳空间内的驱动电机(图中未标示出)。一对主动轮21将清洁装置100分隔成位于一对主动轮21前侧的前部区域(图中未标示出)以及位于一对主动轮21后侧的后部区域(图中未标示出)。驱动电机与一对主动轮21传动连接,以驱动一对主动轮21转动;从动轮22位于吸口41(见下文)的前侧并被配置成可绕一大致垂直于底盖11的轴心线转动,以调整清洁装置100的前进方向。
20.参阅图1、图2与图6,导航系统包括位于机器人本体10的顶部且可转动的激光雷达头31、布置于壳体1外周壁面上的一对沿墙传感器32以及布置于底盖11上的多个跌落传感器33与一个超声波传感器34。激光雷达头31位于后部区域并且能够探测外部的环境,以便于清洁装置100规划移动路径;一对沿墙传感器32分别靠近辊腔14(见下文)的左侧开口与右侧开口,其能够探测自身位置与墙体等处的距离,以防止清洁装置100碰撞或摩擦墙体等处;跌落传感器33布置于前部区域,其能够探测底盖11与待清洁表面的距离,以避免清洁装置100从楼梯等处跌下;超声波传感器34前部区域的最前侧且能够探测前清洁装置100的前
进方向上是否有地毯,以避免清洁装置100驶入地毯上而无法继续移动。
21.参阅图5与图7,干式吸尘系统位于清洁装置100的前部区域,其包括布置于底盖11上并朝向待清洁表面的吸口41、与该吸口41流体连通的集尘盒42以及布置于容纳空间内的吸尘电机43。
22.清洁装置100还包括安装于机器人本体10底部的一对边刷20,一对边刷20被配置成可分别绕一大致垂直于底盖11的轴心线地转动且分别布置于吸口41的左右两侧。各边刷20均具有周向布置的多条刷毛簇30,其刷毛簇30相对机器人本体10侧向向外凸出。边刷20能够将待清洁表面上的碎屑扫至吸口41的正下方以及扬起待清洁表面上的灰尘。
23.集尘盒42内限定有用于存储污物(包括碎屑与灰尘)的第一收集空间421,第一收集空间421与吸口41流体连通。吸尘电机43与集尘盒42流体连通并能够在第一收集空间421至吸口41的流体路径上处施加负压,以使得吸口41吸入附近的污物。
24.湿式擦地系统布置于清洁装置100的后部区域,其包括用于提供清洁流体的流体供应机构、利用清洁流体擦拭待清洁表面的擦地机构以及从待清洁表面上回收污液的污液回收机构。
25.壳体1限定有一位于后部区域的辊腔14,该辊腔14具有一朝向待清洁表面的下部开口(图中未标示出)以及左右相对的左侧开口(图中未标示出)与右侧开口(图中未标示出)。结合图4,左侧开口与右侧开口分别位于壳体1的最左侧与最侧,可以理解地,该左侧开口与右侧开口限定了壳体1的最大宽度。一对主动轮21位于左侧开口与右侧开口的内侧,即一对主动轮21的间距小于该最大宽度。
26.结合图8,擦地机构布置于机器人本体10的后部区域且包括刷辊组件和驱动该刷辊组件转动的刷辊电机51。刷辊组件包括套接于刷辊电机51外侧的支架52以及左右并排的第一刷辊53与第二刷辊54,支架52包括可中空的悬挂件521、分别位于悬挂件521左右两侧的一对减速器522以及同样分别位于可悬挂件521左右两侧且中空的一对支撑体523。其中,第一刷辊53与第二刷辊54限定有一旋转轴心线y,刷辊电机51、一对减速器522以及一对支撑体523的轴心线均与该旋转轴心线y重合。
27.悬挂件521布置于辊腔14的中部且固定连接底盖11上。刷辊电机51为一双向输出的内置电机,其主体部分安置于悬挂件521的内侧。刷辊电机51的两侧输出端部均穿出悬挂件521且传动连接相应侧的减速箱522。一对支撑体523分别套接于相应侧的减速器522并被配置成可由减速器522带动绕旋转轴心线y转动。
28.第一刷辊53与第二刷辊54均为中空结构并分别套接于相应侧的支撑体523上,由此,刷辊电机51可同步地驱动第一刷辊53与第二刷辊54绕着旋转轴心线y转动。其中,第一刷辊53刷毛层的右侧端部与第二刷辊54刷毛层的左侧端部被配置成可相互接触,以消除第一、第二刷辊之间的清洁盲区。本实施例中,刷辊电机51同时位于第一刷辊53与第二刷辊54的内侧,在其他实施例中,刷辊电机也可单独套接于第一刷辊或第二刷辊的内部。
29.第一刷辊55的左侧端部与第二刷辊56的右侧端部分别齐平辊腔14的左侧开口与右侧端口并对外露出,第一、第二刷辊的下部均穿过辊腔14的下部开口,以接触待清洁表面。可以理解地,第一刷辊55左侧端部与第二刷辊56右侧端部限定了机器人本体10的最大宽度w。如图3所示,第一刷辊55与第二刷辊56分别可从辊腔14的左侧开口与右侧开口处抽出并脱离支架52,以便于用于更换刷辊。
30.在本实施例中,机器人本体的最大宽度w与壳体1的最大宽度等长。在其他实施例中,第一刷辊与第二刷辊还可以被配置成相对左侧开口与右侧开口侧向向外凸出,在该情况下,机器人本体的最大宽度大于壳体的最大宽度且仍由第一刷辊的左侧端部与第二刷辊的右侧端部限定。
31.继续参阅图2、图5与图7,流体供应机构包括位于流体供应箱61、流体分配器62以及位于流体供应箱61与流体分配器62之间的流体泵63,流体供应箱61、流体泵63以及流体分配器62依次流体连通且均位于容纳空间内。
32.流体供应箱61布置于一对主动轮21之间,其能够储存以及对外提供清洁流体;流体分配器62沿着左右方向延伸地安装于底盖11的上壁面,其位于辊腔14的上侧并能够将清洁流体均匀地分配于第一、第二刷辊的外圆周面上;流体泵63被配置成可选择性地开启与停运,以选择性地向流体分配器62输送流体供应箱61内的清洁流体以及阻止流体供应箱61内的清洁流体流入流体分配器62。
33.进一步地,流体供应系统还包括从机器人本体10的后部对外露出的补液口64,该补液口64与流体供应箱61流体连通,以便于向清洁装置100的流体供应箱61添加清洁流体。
34.参阅图7与图9,污液回收机构包括毗邻辊腔14后侧的污液盒71、安装于污液盒71上的刮辊器72、与污液盒71流体连通的污液回收容器73以及与污液回收容器73流体连通的污液泵74。污液盒71、刮辊器72、污液回收容器73以及污液泵74集成一组件40,该组件40可整体可拆卸地安装于壳体1且位于机器人本体10的后部区域。
35.污液盒71包括上下布置的上盒体711与下盒体712,上盒体711与下盒体712共同限定有一与辊腔14流体连通的回收腔713,该回收腔713具有一个毗邻辊腔14的污液入口(图中未标示出)。下盒体712的前侧端部被配置成其外轮廓与第一、第二刷辊的外圆周面相适配并且与第一、第二刷辊形成间隙配合。
36.刮辊器72沿左右方向延伸且安装于上盒体711的前部,该刮辊器72位于污液入口处且其前端部伸入辊腔14内。刮辊器72同时抵接第一、第二刷辊的外圆周面,以刮下其外圆周面所携带的污液。可以理解地,刮辊器72刮下的污液将流入回收腔713内。
37.进一步地,下盒体712上还安装有柔性刮条714,该柔性刮条714的前端部可抵接待清洁表面,以将待清洁表面上的污液限定于辊腔14下部开口的下方。
38.污液回收容器73内限定有用于容纳污液的第二收集空间731并具有一供污液流入污液回收容器73的进液管732。进液管732沿着上下方向延伸且高于污液箱73的底部,以防止第二收集空间731内污液回流。
39.进一步地,污液回收容器73上还布置有一对液位探针733,一对液位探针733伸入第二收集空间731内,以监测第二收集空间731的液位。
40.污液泵74布置于污液盒71与污液回收容器73之间并同时流体连通污液盒71与污液回收容器73的进液管732,污液泵74被配置成能够在回收腔713处形成负压并将回收腔713内的污液经由进液管732输送至第二收集空间731内。
41.进一步地,污液盒71内还布置有靠近污液泵74的滤网715,以将污液中的固体垃圾拦截于回收腔713内,从而避免固体垃圾堵塞污液泵74或相关管路。
42.如图5所示,本发明所提供的清洁装置100将干式吸尘系统与湿式擦地系统分别布置于前部区域与后部区域,该紧凑型布置方式可避免清洁装置100的部件堆积,从而在不减
小第一收集空间421、流体供应箱61以及第二收集空间731的体积的前提下最大限度地减小清洁装置100的机身高度,使得该清洁装置100可进入床底、桌底等高度受限的区域进行清洁作业。
43.以下说明清洁装置100的工作原理:当清洁装置100在待清洁表面上移动并进行清洁作业时,吸尘电机43、流体泵63以及污液泵74均启动。转动的边刷20将待清洁表面污液清扫至吸口41的附近,这些污物在吸尘电机43的作用下经由吸口41到达并被储存于第一收集空间421内,从而首先完成待清洁表面的干式清洁过程,以去除待清洁表面上的粗垃圾。
44.流体供应箱61内的清洁流体被流体泵63输送至流体分配器62上并经由流体分配器62分配置第一、第二刷辊的外圆周面上,第一、第二刷辊利用该外圆周面对清洁表面进行清洁作业。第一、第二刷辊所携带的污液被刮辊器72刮下并在污液泵74的作用下先后经由回收腔713、污液泵74以及进液管732到达并被储存于第二收集空间731内,从而在完成干式清洁过程的待清洁表面上完成湿式清洁过程,以去除待清洁表面上的油污等污物。由于本清洁装置100配置了污液回收机构,其能够在第一、第二刷辊对待清洁表面清洁的过程中持续去除第一、第二刷辊上的污液,从而位置第一、第二刷辊的清洁程度,防止其因受污染而清洁效果降低。
45.可以理解地,由于本发明所提供的清洁装置100被配置成第一刷辊53的左侧端部位于机器人本体10上的最左侧,第二刷辊54的右侧端部位于机器人本体10上的最右侧,因而,在同大小的自移动式清洁装置中,本发明所提供的清洁装置100具有最大的刷辊轴向长度(本技术为第一、第二刷辊的轴向长度之和),从而可减少清洁装置100在待清洁表面上来回移动的次数,提高清洁装置100的清洁效率与能源利用率。此外,该清洁装置100进行清洁作业时,可通过第一、第二刷辊对墙角等处进行湿式清洁,由此克服了传统自移动式地面清洁装置存在的清洁盲区,不必用户进行二次清洁。
46.上述实施例只为说明本技术的技术构思及特点,其目的在于让熟悉此项技术的人士能够了解本技术的内容并据以实施,并不能以此限制本技术的保护范围。凡根据本技术精神所作的等效变化或修饰,都应涵盖在本技术的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1