一种室内扫地机器人
1.本实用新型涉及一种智能设备,尤其涉及一种室内扫地机器人。
背景技术:
2.扫地机器人是近几年逐渐兴起的一种智能设备,可以通过手机控制设备的行动路径,并且设备通过雷达传感器等装置实现自动避障,一些高端的设备还带有拖地功能,不管是高端还是中低端设备受限于设备的体积所设置的灰盒都相对较小,致使需要人工频繁的对灰盒进行清理,否则设备无法继续进行清洁工作。
技术实现要素:
3.本实用新型的目的在于提供一种室内扫地机器人,以解决上述技术问题。
4.为实现上述目的本实用新型采用以下技术方案:一种室内扫地机器人,包括主机、灰盒、底座、充电仓、出入口、盖板,所述灰盒嵌装在主机后侧,所述底座安装在充电仓底部,所述出入口位于底座和充电仓的前侧,所述盖板铰接在充电仓顶部。
5.在上述技术方案基础上,所述主机包括传感器、充电口、开槽、托条、磁铁,所述传感器共有四个,均等距嵌装在主机侧壁中部,所述充电口嵌装在主机侧壁的左后方位置,所述开槽位于主机的后侧,且开槽的左右两侧内壁均嵌有两颗磁铁,在开槽的左右两侧侧壁与前侧侧壁的底部均有一体成型的托条。
6.在上述技术方案基础上,所述灰盒包括磁铁、插口、挡灰板、引磁片、通孔、弹簧片a、弹簧片b,所述灰盒的左右两侧侧壁均嵌有等距排列的两颗磁铁,与开槽两侧内壁的磁铁位置相对应,所述插口位于灰盒的前端,与灰盒一体成型,所述挡灰板共有两个,分别铰接在插口前部的上下两端,且铰接轴内安装有铰簧,所述引磁片嵌装在灰盒的顶部中心位置,所述通孔位于灰盒后部中心位置,所述弹簧片a位于灰盒内,其中一端位于通孔前方,另一端嵌入灰盒左侧内壁前端凹槽内,所述弹簧片b位于灰盒内,其中一端嵌入弹簧片a内,另一端嵌入灰盒右侧内壁前端凹槽内。
7.在上述技术方案基础上,所述弹簧片a为中空双层设计,弹簧片b为单层设计。
8.在上述技术方案基础上,所述底座包括电机、丝杆、轴承、支架、滑块、光杆、龙门架、连接板、电磁铁、立板、电动推杆、充电座、电路板,所述电机安装在底座左后侧靠近边缘位置,所述丝杆的一端与电机相连,另一端穿过电机前方的支架嵌入底座左前方靠近边缘位置的支架中心位置的轴承内,所述底座的右前方靠近边缘位置和右后方靠近边缘位置均安装有支架,且两个支架嵌有光杆,所述滑块共有两个,分别套装在丝杆和光杆中部,每个滑块的左右两侧均安装有两个轮子,其中左侧的滑块的中部嵌有一个电机,并在转轴顶端连接有纵向丝杆,且纵向安装的丝杆的顶端嵌入龙门架顶端靠左位置的轴承内,右侧滑块顶部和龙门架顶端靠右位置之间嵌有一根光杆,所述龙门架的两条架腿前端通过螺丝分别与两个滑块的外壁相连,所述两个滑块顶部所纵向安装的丝杆和光杆之间装有连接板,且连接板底部中心位置通过螺丝固定有一个电磁铁,所述立板使用螺丝固定在底座中轴线后
部靠近边缘位置,所述电动推杆通过螺纹安装在立板前壁顶部靠近边缘位置,所述充电座安装在底座中轴线左侧,位于左侧滑块右侧,所述电路板通过螺丝固定在底座顶部靠近后侧边缘位置。
9.在上述技术方案基础上,所述充电仓的内部空间的前三分之一部分分隔为独立的垃圾斗,并在垃圾斗的后壁上部靠近边缘位置开有一个矩形通孔,且矩形通孔的尺寸与灰盒前端的插口外径尺寸相同。
10.与现有技术相比,本实用新型具有以下优点:本实用新型的灰盒为可分离式设计,在灰盒满载后返回充电仓利用机械壁自动拆下灰盒并将灰盒内垃圾转存至充电仓内侧垃圾斗内,便于后期进行打包清空,相比传统扫地机器人不需要频繁的去进行人工清理,更加省时省力。
附图说明
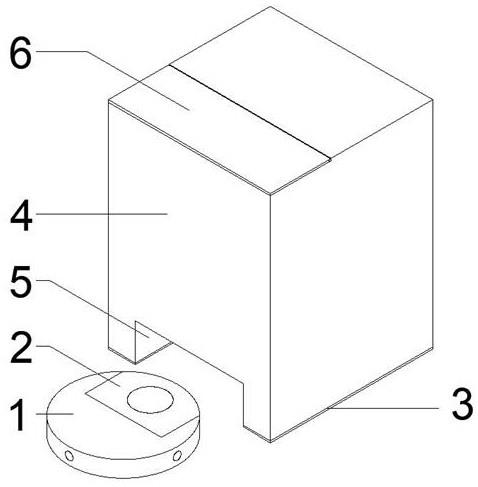
11.图1为本实用新型的主视图。
12.图2为本实用新型的主机结构示意图。
13.图3为本实用新型的灰盒结构示意图。
14.图4为本实用新型的灰盒剖面图。
15.图5为本实用新型的内部结构示意图。
16.图6为本实用新型的充电仓剖面图。
17.图中:包括主机1、灰盒2、底座3、充电仓4、出入口5、盖板6、传感器7、充电口8、开槽9、托条10、磁铁11、插口12、挡灰板13、引磁片14、通孔15、弹簧片a 16、弹簧片b 17、电机18、丝杆19、轴承20、支架21、滑块22、光杆23、龙门架24、连接板25、电磁铁26、立板27、电动推杆28、充电座29、电路板30、矩形通孔31、矩形通孔32。
具体实施方式
18.下面结合附图和具体实施例对本实用新型作进一步详细阐述。
19.如图1所示,一种室内扫地机器人,包括主机1、灰盒2、底座3、充电仓4、出入口5、盖板6,所述灰盒2嵌装在主机1后侧,所述底座3安装在充电仓4底部,所述出入口5位于底座3和充电仓4的前侧,所述盖板6铰接在充电仓4顶部。
20.如图2所示,所述主机1包括传感器7、充电口8、开槽9、托条10、磁铁11,所述传感器7共有四个,均等距嵌装在主机1侧壁中部,所述充电口8嵌装在主机1侧壁的左后方位置,所述开槽9位于主机1的后侧,且开槽9的左右两侧内壁均嵌有两颗磁铁11,在开槽9的左右两侧侧壁与前侧侧壁的底部均有一体成型的托条10。
21.如图3和图4所示,所述灰盒2包括磁铁11、插口12、挡灰板13、引磁片14、通孔15、弹簧片a16、弹簧片b17,所述灰盒2的左右两侧侧壁均嵌有等距排列的两颗磁铁11,与开槽9两侧内壁的磁铁11位置相对应,所述插口12位于灰盒2的前端,与灰盒2一体成型,所述挡灰板3共有两个,分别铰接在插口12前部的上下两端,且铰接轴内安装有铰簧,所述引磁片14嵌装在灰盒2的顶部中心位置,所述通孔15位于灰盒2后部中心位置,所述弹簧片a16位于灰盒2内,其中一端位于通孔15前方,另一端嵌入灰盒2左侧内壁前端凹槽内,所述弹簧片b17位于灰盒2内,其中一端嵌入弹簧片a16内,另一端嵌入灰盒2右侧内壁前端凹槽内,所述弹簧
片a16为中空双层设计,弹簧片b17为单层设计。
22.如图5所示,所述底座3包括电机18、丝杆19、轴承20、支架21、滑块22、光杆23、龙门架24、连接板25、电磁铁26、立板27、电动推杆28、充电座29、电路板30,所述电机18安装在底座3左后侧靠近边缘位置,所述丝杆19的一端与电机18相连,另一端穿过电机18前方的支架21嵌入底座3左前方靠近边缘位置的支架21中心位置的轴承20内,所述底座3的右前方靠近边缘位置和右后方靠近边缘位置均安装有支架21,且两个支架21嵌有光杆23,所述滑块22共有两个,分别套装在丝杆19和光杆23中部,每个滑块22的左右两侧均安装有两个轮子,其中左侧的滑块22的中部嵌有一个电机18,并在转轴顶端连接有纵向丝杆19,且纵向安装的丝杆19的顶端嵌入龙门架24顶端靠左位置的轴承20内,右侧滑块22顶部和龙门架24顶端靠右位置之间嵌有一根光杆23,所述龙门架24的两条架腿前端通过螺丝分别与两个滑块22的外壁相连,所述两个滑块22顶部所纵向安装的丝杆19和光杆23之间装有连接板25,且连接板25底部中心位置通过螺丝固定有一个电磁铁26,所述立板27使用螺丝固定在底座3中轴线后部靠近边缘位置,所述电动推杆28通过螺纹安装在立板27前壁顶部靠近边缘位置,所述充电座29安装在底座3中轴线左侧,位于左侧滑块22右侧,所述电路板30通过螺丝固定在底座3顶部靠近后侧边缘位置。
23.如图6所示,所述充电仓4的内部空间的前三分之一部分分隔为独立的垃圾斗32,并在垃圾斗32的后壁上部靠近边缘位置开有一个矩形通孔31,且矩形通孔31的尺寸与灰盒2前端的插口13外径尺寸相同。
24.本实用新型的灰盒为可分离式设计,在灰盒满载后返回充电仓后充电口与充电座对插到位即刻进行充电,同时将主机对插到位的信号传送至主板处理器并给电磁铁通电产生磁性,横向安装的电机和纵向安装的电机带动丝杆旋转,使滑块、龙门吊和连接板同步运动,将电磁铁移动至灰盒顶部的引磁片上方并利用磁性吸住引磁片,此时横向电机反转带动滑块后移,将灰盒前端的插口与主机脱离,同时挡灰板在铰簧作用下封闭插口,防止垃圾漏出,此时纵向安装的电机将灰盒抬升至矩形通孔同一高度并插入矩形通孔内,电动推杆开始工作将前端插入通孔内,并推动两个弹簧板向前移动,在移动过程中,弹簧板a会逐步插入弹簧板b内,最后在电动推杆的作用下,将两块弹簧板顶至插口外,此时灰盒内垃圾全部落入垃圾斗内,电动推杆返回,两块弹簧板在自身弹性作用下逐步复原,两个电机带动滑块、龙门架和连接板同步运动,将灰盒重新插入主机内,完成灰盒清空工作,全程无需人工干预,所有垃圾全部集中至垃圾斗内,便于后期进行打包清空,相比传统扫地机器人不需要频繁的去进行人工清理,更加省时省力。
25.以上所述为本实用新型较佳实施例,对于本领域的普通技术人员而言,根据本实用新型的教导,在不脱离本实用新型的原理与精神的情况下,对实施方式所进行的改变、修改、替换和变型仍落入本实用新型的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1