一种水面垃圾收集机器人的制作方法
[0001]
本发明涉及水面垃圾处理技术领域,更具体地说,本发明涉及一种水面垃圾收集机器人。
背景技术:
[0002]
据调查了解,目前我国现有的河流湖泊均受到不同程度的污染。特别是各个景区的湖泊污染严重,不仅影响游客观光心情,而且景区水面污染物得不到及时处理将会产生二次污染物,一方面影响水质,另一方面对游客造成潜在的健康隐患。
[0003]
但是目前水面垃圾清理大多采用人工清理,这样效率低、安全性低、成本大,少数采用人工设备半自动清理,这样不仅仅设备成本昂贵,而且还是需要人工配合打捞效率低,无法白天黑夜无休息式工作。
技术实现要素:
[0004]
为了克服现有技术的上述缺陷,本发明的实施例提供一种水面垃圾收集机器人,本发明所要解决的问题是:现有的水域垃圾通过人工清理不方便,效率低、安全性低、成本大。
[0005]
为实现上述目的,本发明提供如下技术方案:一种水面垃圾收集机器人,包括收集筒、套筒和支撑脚,所述收集筒底部安装有套筒,所述套筒两侧底部安装有支撑脚,所述套筒内腔一侧安装有联动机构,且联动机构位于收集筒一侧底部,所述套筒底部安装有支撑架,所述支撑架顶部活动安装有转筒,且转筒位于套筒内腔底端,所述转筒顶部安装有转盘,所述转筒外侧壁开设有导向槽,所述转筒内腔壁安装有涡轮叶,所述转盘内侧贯穿开设有贯穿孔,所述转盘表面开设有行程槽;
[0006]
所述收集筒包括外筒,所述外筒内腔活动安装有内筒,所述外筒侧壁和底部均贯穿开设有一号流通槽,所述内筒侧壁和底部均贯穿开设有二号流通槽),所述外筒两侧分别开设有一号弧形槽和二号弧形槽,所述外筒一侧安装有弧形齿轮条,且弧形齿轮条位于一号弧形槽上方;
[0007]
所述联动机构包括导向杆,所述导向杆底端固定连接有连接杆,所述连接杆一端固定连接有一号滑行块,且一号滑行块一端滑动位于导向槽内腔,所述导向杆顶部固定连接有连接板,所述连接板一端活动连接有升降杆,所述升降杆底部安装有一号活塞筒,且升降杆底端滑动插接于一号活塞筒内腔,所述升降杆顶端安装有齿轮辊,且齿轮辊与弧形齿轮条啮合连接,所述升降杆靠近外筒一侧固定连接有推杆,且推杆一端通过滑块滑动位于一号弧形槽内腔,所述一号活塞筒底部一侧固定连接有连接件,所述连接件一端底部转动连接有二号滑行块,且二号滑行块底端滑动位于行程槽内腔。
[0008]
优选的,所述套筒一侧安装有伸缩机构,所述伸缩机构包括二号活塞筒,且二号活塞筒固定于支撑脚顶部,所述二号活塞筒内腔顶部滑动插接有升降架,且升降架为l型结构,所述升降架一端通过滑块滑动位于二号弧形槽内腔,所述二号活塞筒内腔两侧开设有
二号导向滑槽,所述升降架底端两侧固定连接有二号导向滑块,且二号导向滑块滑动位于二号导向滑槽内腔。
[0009]
优选的,所述内筒顶端固定连接有卡接环,所述卡接环一侧底端安装有滑勾,所述外筒外侧顶端开设有凹槽,且滑勾滑动位于凹槽内腔,所述卡接环一侧固定连接有固定杆,且固定杆位于外筒一侧,所述固定杆底端固定于升降架顶端。
[0010]
优选的,所述一号活塞筒内腔两侧均开设有一号导向滑槽,所述升降架底端两侧均固定连接有一号导向滑块,且一号导向滑块位于一号导向滑槽内腔。
[0011]
优选的,所述支撑脚包括支撑管,所述支撑管内腔活动插接有二号杆,所述二号杆顶部固定连接有一号杆,且一号杆顶端与二号活塞筒底端以及套筒一侧固定连接,所述支撑管和二号杆内侧均贯穿开设有调节孔,且调节孔设有多组,所述支撑管和二号杆之间贯穿插接有固定栓,且固定栓贯穿调节孔内腔。
[0012]
优选的,所述套筒内腔一侧固定连接有固定架,且固定架一端通过轴承活动固定于一号活塞筒一侧,所述固定架靠近中间端安装有二号活动环,且导向杆活动贯穿二号活动环内腔。
[0013]
优选的,所述外筒底端安装有喇叭波纹管,且喇叭波纹管位于贯穿孔上方。
[0014]
优选的,所述连接板一端固定连接有一号活动环,且升降杆活动贯穿一号活动环,所述升降杆两侧安装有限位块,且限位块位于一号活动环两端。
[0015]
优选的,所述支撑架底端安装有电机,且电机顶端安装于镂空底板底部。
[0016]
本发明的技术效果和优点:
[0017]
1、本发明通过设置联动机构,使其与转盘和转筒配合下不仅仅可以实现带动收集筒的外筒进行旋转操作,从而使其外筒转动控制一号流通槽和二号流通槽的启闭状态,而且还实现了带动收集筒进行上升与下降自动完成垃圾收集功能,提高工作效率,降低人工成本,可以二十四小时无停机、无人员值守工作;通过设置转筒,使其不仅仅可以带动联动机构进行上升与旋转操作;而且还可以在旋转的时候配合涡轮叶形成从上向下吸附的漩涡,这样保证收集的垃圾一直在吸附力的作用下吸附在收集筒内腔,避免收集后垃圾漂浮出来;
[0018]
2、本发明通过在收集筒底端与转筒之间设置套筒,以及在收集筒底部与转盘之间设置具有一定伸缩性的喇叭波纹管,这样保证转筒旋转产生的漩涡吸附力比较集中,从而具有充分的吸附力吸附垃圾,通过设置可以调节升降的支撑脚方便设备适应不同深度的水域工作。
附图说明
[0019]
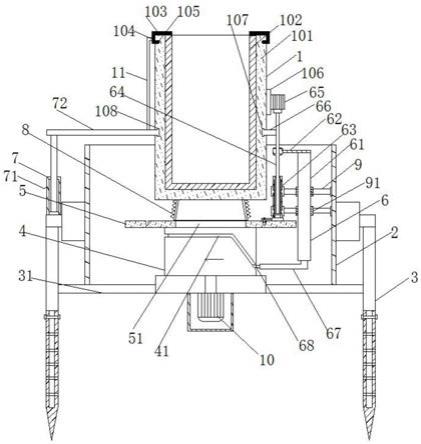
图1为本发明整体初始结构的示意图;
[0020]
图2为本发明收集筒端口位于水面下方状态结构示意图;
[0021]
图3为本发明收集筒端口由水面下方运动到水面上方状态结构示意图;
[0022]
图4为本发明收集筒端口位于水面上方状态结构示意图;
[0023]
图5为本发明二号滑行块初始状态俯视结构示意图;
[0024]
图6为本发明二号滑行块在b区域时状态俯视结构示意图;
[0025]
图7为本发明二号滑行块由a区域运动到b区域时状态俯视结构示意图;
[0026]
图8为本发明二号滑行块在a区域时状态俯视结构示意图;
[0027]
图9为本发明收集筒结构示意图;
[0028]
图10为本发明外筒结构示意图;
[0029]
图11为本发明内筒结构示意图;
[0030]
图12为本发明弧形齿轮条俯视结构示意图;
[0031]
图13为本发明转筒俯视结构示意图;
[0032]
图14为本发明支撑脚结构示意图;
[0033]
图15为本发明联动机构结构示意图。
[0034]
附图标记为:1、收集筒;101、外筒;102、内筒;103、卡接环;104、滑勾;105、凹槽;106、弧形齿轮条;107、一号弧形槽;108、二号弧形槽;109、一号流通槽;110、二号流通槽;2、套筒;3、支撑脚;31、支撑架;32、支撑管;33、一号杆;34、二号杆;35、调节孔;36、固定栓;4、转筒;41、导向槽;42、镂空底板;43、涡轮叶;5、转盘;51、贯穿孔;52、行程槽;6、联动机构;61、导向杆;62、连接板;63、一号活塞筒;64、升降杆;65、齿轮辊;66、推杆;67、连接杆;68、一号滑行块;69、连接件;610、二号滑行块;611、一号导向滑块;612、一号导向滑槽;613、一号活动环;614、限位块;7、伸缩机构;71、二号活塞筒;72、升降架;73、二号导向滑块;74、二号导向滑槽;8、喇叭波纹管;9、固定架;91、二号活动环;10、电机;11、固定杆。
具体实施方式
[0035]
下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
[0036]
本发明一实施例的通信网络电缆装载运输设备,包括收集筒1、套筒2和支撑脚3,所述收集筒1底部安装有套筒2,所述套筒2两侧底部安装有支撑脚3,所述套筒2内腔一侧安装有联动机构6,且联动机构6位于收集筒1一侧底部,所述套筒2底部安装有支撑架31,所述支撑架31顶部活动安装有转筒4,且转筒4位于套筒2内腔底端,所述转筒4顶部安装有转盘5,所述转筒4外侧壁开设有导向槽41,所述转筒4内腔壁安装有涡轮叶43,所述转盘5内侧贯穿开设有贯穿孔51,所述转盘5表面开设有行程槽52。
[0037]
参照说明书附图1-15,该实施例的通信网络电缆装载运输设备的所述收集筒1包括外筒101,所述外筒101内腔活动安装有内筒102,所述外筒101侧壁和底部均贯穿开设有一号流通槽109,侧壁的一号流通槽109与外筒101的轴线平行,底部的一号流通槽109的延长线与外筒101的轴线垂直相交,所述内筒102侧壁和底部均贯穿开设有二号流通槽110,侧壁的二号流通槽110与内筒102的轴线平行,底部的二号流通槽110的延长线与内筒102的轴线垂直相交,所述外筒101两侧分别开设有一号弧形槽107和二号弧形槽108,所述外筒101一侧安装有弧形齿轮条106,且弧形齿轮条106位于一号弧形槽107上方;
[0038]
所述联动机构6包括导向杆61,所述导向杆61底端固定连接有连接杆67,所述连接杆67一端转动连接有一号滑行块68,且一号滑行块68一端滑动位于导向槽41内腔,所述导向杆61顶部固定连接有连接板62,所述连接板62一端活动卡扣连接有升降杆64,所述升降杆64底部安装有一号活塞筒63,且升降杆64底端滑动卡扣接于一号活塞筒63内腔,所述升
降杆64顶端安装有齿轮辊65,且齿轮辊65与弧形齿轮条106啮合连接,所述升降杆64靠近外筒101一侧固定连接有推杆66,且推杆66一端通过滑块滑动位于一号弧形槽107内腔,所述一号活塞筒63底部一侧固定连接有连接件69,所述连接件69一端底部转动连接有二号滑行块610,且二号滑行块610底端滑动位于行程槽52内腔。
[0039]
如图1-15所示,实施场景具体为:(1)一号活塞筒63底部连接件69底端的二号滑行块610位于行程槽52内腔,当二号滑行块610由行程槽52内腔的b区域运动到a区域时,二号滑行块610通过连接件69带动顶部的一号活塞筒63旋转,由于在一号导向滑槽612和一号导向滑块611的配合设置,因此一号活塞筒63旋转时,将带动顶部的升降杆64同时旋转,所以升降杆64将带动顶部的齿轮辊65旋转,从而使其齿轮辊65与一侧啮合连接的弧形齿轮条106的配合下,将带动外筒101转动,因为内筒102顶部固定连接的卡接环103通过固定杆11与升降架72固定连接,由于升降架72不能转动,而且卡接环103与外筒101之间处于滑动连接,所以外筒101在进行转动的时候,将不会带动内筒102同时转动,由于外筒101转动,因此外筒101的侧壁和底部设置的一号流通槽109将与内筒102的二号流通槽110由对孔连通的状态变为错位闭合的状态;(2)当一号活塞筒63底部连接件69底端的二号滑行块610位于行程槽52内腔的a区域行程内时(此时如图6所示的状态),外筒101和内筒102侧壁、底部分别设置的一号流通槽109和二号流通槽110处于错位闭合的状态;(3)当二号滑行块610由行程槽52内腔的a区域运动到b区域时,外筒101和内筒102侧壁、底部分别设置的一号流通槽109和二号流通槽110,由错位闭合的状态变为对孔连通的状态;(4)当一号活塞筒63底部连接件69底端的二号滑行块610位于行程槽52内腔的b区域行程内时,外筒101和内筒102侧壁、底部分别设置的一号流通槽109和二号流通槽110处于对孔连通的状态。
[0040]
在实际使用时,将设备通过支撑脚3固定在水下,(一)、当设备为初始状态的时候,收集筒1位于水平面底部,联动机构6的导向杆61位于最低临界点位置,收集筒1此时与转盘5处于靠近状态,二号滑行块610此时位于行程槽52内腔的a区域行程内,一号流通槽109和二号流通槽110处于错位闭合的状态;(二)、当电机10带动转筒4向左旋转第一段后(图2),转筒4带动顶部的转盘5旋转,此时二号滑行块610还在行程槽52的a区域行程内,一号流通槽109和二号流通槽110处于错位闭合的状态,这样内筒102和外筒101的侧壁和底部不可以使其水自由进出;(二)、当电机10在上面行程运行后的基础上继续转动后,此时由于连接杆67一端的一号滑行块68在转筒4外侧导向槽41内腔走上坡行程段,因此连接杆67上升,从而连接杆67带动升降杆64在一号活塞杆63内腔上升,升降杆64一侧推杆66滑动插接在外筒101一侧的一号弧形槽107内腔,因此升降杆64利用推杆66将带动收集筒1上升,使其收集筒1顶端端口露出水平面(图3),当收集筒1顶端端口刚刚与水平面齐平时,二号滑行块610由行程槽52内腔的a区域运动到b区域,外筒101和内筒102侧壁、底部分别设置的一号流通槽109和二号流通槽110,由错位闭合的状态变为对孔连通的状态,所以收集筒1上升的时候,其内部的水从一号流通槽109和二号流通槽110对孔连通的孔中排放出去,收集筒1在上升的时候将会带动一侧的升降架72沿着二号活塞筒71内腔上升,此时连接件69底部的二号滑行块610仍然位于行程槽52的b区域行程内,一号流通槽109和二号流通槽110仍然处于对孔连通的状态;(三)、当电机10在上面行程运行后的基础上继续转动,当收集筒1在上升到离水面上方最高位置时,二号滑行块610由行程槽52内腔的b区域运动到a区域时,外筒101和内筒102侧壁、底部分别设置的一号流通槽109和二号流通槽110,由对孔连通的状态变为错
位闭合的状态,在收集筒1升高过程中,收集筒1内腔的水已经排出,没有灌满水;(四)、然后电机10在上面行程运行后的基础上继续转动,此时连接杆67一端的一号滑行块68在导向槽41内腔走下坡行程段,因此连接杆67拉动升降杆64下降,这样升降杆64通过一侧的推杆66拉动收集筒1下降,因此未灌满水的收集筒1在下降到水平面以下的时候,水流灌入收集筒1内腔同时将较小的漂浮的碎屑垃圾吸附到收集筒1的内腔。(五)、当收集筒1开始向上运动时,收集筒1的内腔没有灌满水(防止碎屑垃圾漂浮到收集筒1的上方流走),当收集筒1上升到顶端端口刚刚与水平面齐平时,二号滑行块610由行程槽52内腔的a区域运动到b区域,外筒101和内筒102侧壁、底部分别设置的一号流通槽109和二号流通槽110,由错位闭合的状态变为对孔连通的状态,所以收集筒1上升的时候,其内部的水从一号流通槽109和二号流通槽110对孔连通的孔中排放出去,因为电机10一直在驱动,在转筒4一直旋转的作用下,带动内腔壁的涡轮叶43旋转形成漩涡,这样在漩涡的作用下透过一号流通槽109和二号流通槽110,使其收集筒1内腔从上向下有漩涡吸附力,水流透过一号流通槽109和二号流通槽110再经过喇叭波纹管8,然后透过转筒4内腔底部镂空底板42向底部排出,同时使其收集筒1内腔的垃圾在漩涡吸附作用下不会向上漂浮,不管收集筒1在做向上升还是下降操作时,收集筒1底部转筒4均一直旋转产生的漩涡吸附力保证垃圾一直吸附于收集筒1内腔,以上操作结束后设备开始重复新一轮上升收集垃圾操作,依次循环操作;通过设置联动机构6,使其与转盘5和转筒4配合下不仅仅可以实现带动收集筒1的外筒101进行旋转操作,从而使其外筒101转动控制一号流通槽109和二号流通槽110的启闭状态,而且还实现了带动收集筒1进行上升与下降自动完成垃圾收集功能;通过设置转筒4,使其不仅仅可以带动联动机构6进行上升与旋转操作;而且还可以在旋转的时候配合涡轮叶43形成从上向下吸附的漩涡,这样保证收集的垃圾一直在吸附力的作用下吸附在收集筒1内腔,避免收集后垃圾漂浮出来;通过在收集筒1底端与转筒4之间设置套筒2,以及在收集筒1底部与转盘5之间设置具有一定伸缩性的喇叭波纹管8,这样保证转筒4旋转产生的漩涡吸附力比较集中,从而具有充分的吸附力吸附垃圾。
[0041]
所述套筒2一侧安装有伸缩机构7,所述伸缩机构7包括二号活塞筒71,且二号活塞筒71固定于支撑脚3顶部,所述二号活塞筒71内腔顶部滑动插接有升降架72,且升降架72为l型结构,所述升降架72一端通过滑块滑动位于二号弧形槽108内腔,所述二号活塞筒71内腔两侧开设有二号导向滑槽74,所述升降架72底端两侧固定连接有二号导向滑块73,且二号导向滑块73滑动位于二号导向滑槽74内腔。
[0042]
如图1-4、13所示,伸缩机构7的设置使其对收集筒1进行活动支撑,保证收集筒1上升与下降,以及外筒101旋转时可以稳定操作,提高稳定性,外筒101转动的时候升降架72一端在二号弧形槽108内腔滑动,收集筒1上升或下降时升降架72沿着二号活塞筒71上下升降。
[0043]
所述内筒102顶端固定连接有卡接环103,所述卡接环103一侧底端安装有滑勾104,所述外筒101外侧顶端开设有凹槽105,且滑勾104滑动位于凹槽105内腔,所述卡接环103一侧固定连接有固定杆11,且固定杆11位于外筒101)一侧,所述固定杆11底端固定于升降架72顶端。
[0044]
所述一号活塞筒63内腔两侧均开设有一号导向滑槽612,所述升降架72底端两侧均固定连接有一号导向滑块611,且一号导向滑块611位于一号导向滑槽612内腔。
[0045]
如图15所示,一号导向滑块611和一号导向滑槽612的配合保证一号活塞筒63转动的时候带动顶部升降杆64进行转动。
[0046]
所述支撑脚3包括支撑管32,所述支撑管32内腔活动插接有二号杆34,所述二号杆34顶部固定连接有一号杆33,且一号杆33顶端与二号活塞筒71底端以及套筒2一侧固定连接,所述支撑管32和二号杆34内侧均贯穿开设有调节孔35,且调节孔35设有多组,所述支撑管32和二号杆34之间贯穿插接有固定栓36,且固定栓36贯穿调节孔35内腔。
[0047]
如图14所示,支撑脚3可以通过拉伸一号杆33和二号杆34调节整体高度,当需要调节高度的时候取下固定栓36,然后拉动一号杆33,使其二号杆34在支撑管32内腔伸缩,然后再将固定栓36插入调节筒35内腔进行固定,这样便可以更具水深调节支撑脚3的高度,使其方便垃圾收集机器人可以适应不同深度水域进行工作。
[0048]
所述套筒2内腔一侧固定连接有固定架9,且固定架9一端通过轴承活动固定于一号活塞筒63一侧,所述固定架9靠近中间端安装有二号活动环91,且导向杆61活动贯穿二号活动环91内腔。
[0049]
如图1-4、15所示,固定架9通过轴承对一号活塞筒63进行转动固定,方便一号活塞筒63可以转动还可以保证稳固,同样导向杆61贯穿在固定架9的二号固定环91内腔,这样保证导向杆61可以上下活动时具有稳定性。
[0050]
所述外筒101底端安装有喇叭波纹管8,且喇叭波纹管8位于贯穿孔51上方。
[0051]
如图1-4所示,喇叭波纹管8的设置使其对收集筒1底部与转盘5的贯穿孔51之间进行笼罩,这样保证转筒4旋转产生的漩涡吸附力比较集中,从而具有充分的吸附力吸附垃圾。
[0052]
所述连接板62一端固定连接有一号活动环613,且升降杆64活动贯穿一号活动环613,所述升降杆64两侧安装有限位块614,且限位块614位于一号活动环613两端。
[0053]
如图15所示,一号活动环613的设置保证升降杆64在与连接板62连接的同时可以转动,限位孔614对一号活动环613上下进行限位。
[0054]
所述支撑架31底端安装有电机10,且电机10顶端安装于镂空底板42底部。
[0055]
综上所述:本发明收集筒1在联动机构6与转盘5以及转筒4的配合作用下进行上下升降对水平面垃圾进行收集,通过设置联动机构6,使其与转盘5和转筒4配合下不仅仅可以实现带动收集筒1的外筒101进行旋转操作,从而使其外筒101转动控制一号流通槽109和二号流通槽110的启闭状态,而且还实现了带动收集筒1进行上升与下降自动完成垃圾收集功能;通过设置转筒4,使其不仅仅可以带动联动机构6进行上升与旋转操作;而且还可以在旋转的时候配合涡轮叶43形成从上向下吸附的漩涡,这样保证收集的垃圾一直在吸附力的作用下吸附在收集筒1内腔,避免收集后垃圾漂浮出来;通过在收集筒1底端与转筒4之间设置套筒2,以及在收集筒1底部与转盘5之间设置具有一定伸缩性的喇叭波纹管8,这样保证转筒4旋转产生的漩涡吸附力比较集中,从而具有充分的吸附力吸附垃圾。
[0056]
最后:以上所述仅为本发明的优选实施例而已,并不用于限制本发明,凡在本发明的精神和原则之内,所作的任何修改、等同替换、改进等,均应包含在本发明的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1