一种具有自平衡功能的清污机器人的制作方法
1.本实用新型涉及一种具有自平衡功能的清污机器人,属于河道水面清漂装置技术领域。
背景技术:
2.随着国家对环保的逐渐重视,水库、城市内河等水体受到树叶、杂草、生活垃圾等漂浮污物的污染日益加剧,但是目前国内尚无高效并能彻底清除水面漂浮物的清漂装备,尤其是极易聚集漂浮垃圾的河道边沿极难清理。
3.一方面,在传统的打捞装置或者清漂机器人的结构设计上,通常采用打捞装置的打捞端部会延伸至水面下,人员在操作的过程中,由于是在浮体上进行操作,基于整个装置的体积,操作者很难清晰识别靠近浮体附近水面情况,尤其是打捞结构还位于水面下,在浮体行进的过程中,由于操作者不便于观察容易导致打捞机构碰撞河岸,在整个装置的设计上,需要考虑到整个装置的使用寿命,同时也需要避免该盲区造成对清污装置的损伤。
4.另一方面,在传统的打捞装置或者清漂机器人的设计上,在装置打捞完成后,清污机器人需要靠岸可能会出先浮体侧部与河道碰撞,或者是清污机器人在打捞的过程中由于浮体受力不一致会导致浮体产生一定的高度差,而船只在行进或者是转弯的过程中是不安全的。
技术实现要素:
5.本实用新型的发明目的在于:针对上述存在的问题,提供一种具有自平衡功能的清污机器人,该结构的设计为打捞机构可以升降的方式,在打捞完成后,可通过升降机构将打捞机构位于水面的一端部露出水面,从而能够使操作者能够直观观察到打捞装置的前端,也由此能够有效避免打捞装置的碰撞,并且结合浮箱的设计能够有效的调整船只的平衡状态以及避免浮体与河道直接碰撞。
6.本实用新型采用的技术方案如下:
7.一种具有自平衡功能的清污机器人,包括浮体,所述浮体上设置有用于打捞机构,该打捞机构可上下转动的装配于浮体的前端部,该打捞机构位于浮体上方的一端部与浮体之间还设置有伸缩机构以便于控制打捞机构的升降,该打捞机构位于浮体上方的端部下方所在浮体还设置有漂浮物收纳机构;
8.进一步的,该浮体的两侧还设置有用于浮体平衡的平衡机构,所述平衡机构包括至少一个内部为空心的浮箱,所述浮箱的顶部设置有用于水进出的进出口,并通过水泵控制浮箱内的水量以保证浮体的平衡。
9.进一步的,所述平衡机构可拆卸的装配于浮体的两侧。
10.进一步的,所述打捞机构为网链打捞传送装置。
11.进一步的,所述打捞机构的中部下侧与浮体对应位置设置有连接耳板,连接耳板上设置有通孔,并通过销轴实现装配。
12.进一步的,所述打捞机构的中部下侧的两侧均设置有连接耳板,浮体对应位置也设置有连接耳板。
13.进一步的,所述伸缩机构为伸缩杆,其一端部与打捞机构铰接,另一端部与浮体铰接,通过伸缩机构以控制打捞机构的升降。
14.进一步的,所述伸缩机构为2个,且分别设置于打捞机构的两侧,以避免伸缩机构影响打捞机构打捞漂浮物。
15.进一步的,所述伸缩机构为液压缸伸缩杆。
16.综上所述,由于采用了上述技术方案,本实用新型的有益效果是:
17.本实用新型的一种具有自平衡功能的清污机器人解决了传统清污机器人在打捞机构的设计上为固定在浮体上所要出现不便于操作者观察路况的问题,并打捞机构的可升降结构能够有效的在打捞结束后提升打捞机构打捞端部提升至水面上,当打捞端部提升出水面后更加有利于操作,同时,结合浮箱的设计能够有效的调整船只的平衡状态以及避免浮体与河道直接碰撞。
附图说明
18.图1是本实用新型的结构示意图;
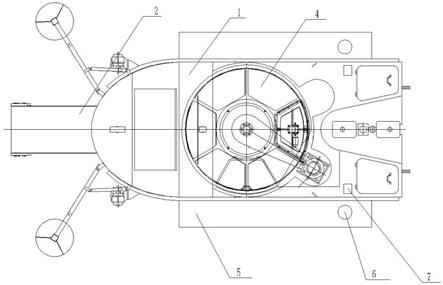
19.图2是本实用新型俯视图的结构示意图;
20.图3是本实用新型打捞机构铰接的结构示意图。
21.图中标记:1
‑
浮体、2
‑
打捞机构、3
‑
伸缩机构、4
‑
漂浮物收纳机构、5
‑
平衡机构、6
‑
进出口、7
‑
水泵。
具体实施方式
22.下面结合附图,对本实用新型作详细的说明。
23.为了使本实用新型的目的、技术方案及优点更加清楚明白,以下结合附图及实施例,对本实用新型进行进一步详细说明。应当理解,此处所描述的具体实施例仅仅用以解释本实用新型,并不用于限定本实用新型。
24.实施例
25.一种具有自平衡功能的清污机器人,如图1至图3所示,包括浮体1,所述浮体上设置有用于打捞机构2,该打捞机构2可上下转动的装配于浮体的前端部,该打捞机构位于浮体上方的一端部与浮体之间还设置有伸缩机构3以便于控制打捞机构的升降,该打捞机构位于浮体上方的端部下方所在浮体还设置有漂浮物收纳机构4;
26.该浮体的两侧还设置有用于浮体平衡的平衡机构5,所述平衡机构包括至少一个内部为空心的浮箱,所述浮箱的顶部设置有用于水进出的进出口6,并通过水泵7控制浮箱内的水量以保证浮体的平衡。
27.本实施例中,在打捞机构可升降的结构设计基础上,在清污机器人需要对水面的漂浮物进行打捞时,打捞机构的打捞端部位于水面的下方以便于漂浮物的打捞,在行进的过程中能够有效的对水面漂浮物进行的打捞,在打捞完成轴,通过伸缩机构控制打捞机构的转动,使得打捞机构的打捞端部提升出水面,在离开水面后整个装置在操作者进行操作时能够有效的观察到打捞机构的打捞端部的情况,从而在行进和靠岸的过程中能够有效的
避免打捞机构碰撞的问题,从而有效的提升了打捞机构的使用寿命。
28.同时,在平衡机构的设计上,根据浮体高度差的问题,可以通过水泵往平衡机构内抽水/灌水的方式来调整该侧的重量或者浮力,需要增大浮力则抽水,提高重量则进行灌入水,通过该方式能够有效的实现平衡的调整,并且也有效的避免了浮体在靠岸时直接碰撞河道的问题。
29.基于上述具体结构的设计基础上,作为更加具体的设计,所述打捞机构2为网链打捞传送装置。
30.针对平衡机构进一步的设计,具体的,所述平衡机构5可拆卸的装配于浮体的两侧。更加具体的,该平衡机构5通过螺栓固定装配在浮体的两侧。具体的结构描述,也是作为可实施的方式,浮体上设置凹槽,并借助固定条装配其中,固定条的两侧通过螺栓把合在浮体上,从而有效的实现整个装置的装配。
31.在上述具体结构设计的基础上,作为具体的设计,所述打捞机构2的中部下侧与浮体对应位置设置有连接耳板,连接耳板上设置有通孔,并通过销轴实现装配。
32.作为更进一步的设计,以附图3为说明,所述打捞机构2的中部下侧的两侧均设置有连接耳板,浮体对应位置也设置有连接耳板。在具体的结构设计中,打捞机构2设置有单耳板,浮体上设置有双耳板,该单耳板设置于双耳板的间隙中,并通过销轴穿过通孔以实现装配,同时也时间整个打捞机构的上下转动效果。销轴的装配方式为沿着打捞机构的宽度方向设置。
33.作为更加具体的设计,在上述的具体结构设计基础上,所述伸缩机构为伸缩杆,其一端部与打捞机构铰接,另一端部与浮体铰接,通过伸缩机构以控制打捞机构的升降。作为进一步的描述,伸缩机构一端部与打捞机构铰接,另一端部与浮体铰接,其铰接后,伸缩机构可沿打捞机构长度方向(浮体行进方向)转动。更加具体的描述,该方式中,当伸缩机构固定后,浮体、打捞机构以及伸缩机构形成了一个三角形结构,三角形具有非常好的稳定性,因此及时在铰接的情况下,也具备稳定的支撑效果。
34.作为更加具体的设计,所述伸缩机构为2个,且分别设置于打捞机构的两侧,以避免伸缩机构影响打捞机构打捞漂浮物。作为具体的描述,该结构的设计能够有效保证其支撑力,也不会影响打捞机构的运转。
35.更加具体的描述,所述伸缩机构为液压缸伸缩杆。
36.综上所述,本实用新型的一种具有自平衡功能的清污机器人解决了传统清污机器人在打捞机构的设计上为固定在浮体上所要出现不便于操作者观察路况的问题,并打捞机构的可升降结构能够有效的在打捞结束后提升打捞机构打捞端部提升至水面上,当打捞端部提升出水面后更加有利于操作,同时,结合浮箱的设计能够有效的调整船只的平衡状态以及避免浮体与河道直接碰撞。
37.以上所述仅为本实用新型的较佳实施例而已,并不用以限制本实用新型,凡在本实用新型的精神和原则之内所作的任何修改、等同替换和改进等,均应包含在本实用新型的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1