匹配路基边坡的斜坡式多功能夯实一体化设备的制作方法
1.本发明涉及路基边坡施工技术,具体涉及一种匹配路基边坡的斜坡式多功能夯实一体化设备。
背景技术:
2.路基边坡的施工质量直接影响边坡的强度和变形稳定性,其中要保证边坡的施工质量的关键一环就是要保证边坡的压实度。目前为了保证路基边坡的压实度满足要求,大多数都采用超方填筑,然后加宽压实,最后利用挖土机进行削坡。这种施工方法一方面导致路基土方量大,对成本和工期均不利;另一方面后期边坡土的开挖卸荷影响整体不平衡力的分布,人工削坡还容易造成边坡松动的现象,施工质量难以保证。
3.而从目前已有的边坡压实机来看,基本上都是在推土机或挖掘机上改加装牵引机械,一般大多通过绞盘卷筒和钢丝绳牵引碾压辊沿着边坡坡面上下反复运动进行边坡压实作业,这种作业方式难以保证振动轮产生的激振力垂直作用在坡面上,并且边坡的平整和塑形工作仍然要依靠挖掘机进行整形;另一方面目前现有装备还存在无法碾压边坡边缘压实不到的死角,无法保证路基边坡整体的压实质量。
技术实现要素:
4.本发明的目的在于提供一种匹配路基边坡的斜坡式多功能夯实一体化设备,该设备能对路基斜坡一体进行粗平、整平、夯实、洒水作业,增加了边坡的稳定性和抗水毁性,施工效率高,适应各尺寸的斜坡,保证了压实效果,无需刷坡,解决超宽填筑土方量大、路基边坡压实质量低的问题,减少了土方量和施工费用。
5.本发明所采用的技术方案是:
6.一种匹配路基边坡的斜坡式多功能夯实一体化设备,包括用于横跨斜坡行走且能适应斜坡的坡度、宽度和走向的底盘(2),底盘(2)的发动机(23)通过分动箱(21)和带有双万向节(22)的传动轴(24)分别驱动前后桥(26、25),前后桥(26、25)的输出半轴均为伸缩轴(27)且均通过锥齿联轴器(28)与行驶轮(29)连接;底盘(2)上减震的安装有车身(1),车身(1)一侧通过液压推杆(159)连接有用于在坡顶行走防翻的配重车(16);车身(1)的首尾端分别伸出的设有前臂装置(3)和后臂装置(7),前臂装置(3)和后臂装置(7)的伸出端均为能起落和调节倾角的平台,前臂装置(3)的平台(39)上从前往后依次设有粗平装置(4)、整平装置(5)和碾实装置(6),后臂装置(7)的平台(79)上设有夯实装置(8),粗平装置(4)、整平装置(5)、碾实装置(6)、夯实装置(8)的工作部均横向设置且分别为能调节高度和角度的斗齿(48)、能调节宽度的整平铲(53)、能升降的羊足碾(63)、能横移的液压振动夯(81),车身(1)后部设有洒水装置(9)和边缘压实装置(10),洒水装置(9)的水源设在配重车(16)上、喷嘴(91)横向分布,边缘压实装置(10)采用能平面运动的小液压振动夯(102)。
7.进一步地,在车身(1)中,车架(15)包括一对上纵梁(152)、一对下纵梁(153)、若干个连接在下纵梁(153)之间的横梁(151)、若干个将上纵梁(152)和下纵梁(153)连接的横框
梁(156)、若干个加强在上纵梁(152)和下纵梁(153)之间的斜支撑(155)、若干个对称加强在下纵梁(153)和横梁(151)之间的y形梁(154)、若干个对称加强在y形梁(154)与下纵梁(153)和横梁(151)之间的角板(158)、贯穿并固定在一对下纵梁(153)上的横向圆轴支架(157),前方的横向圆轴支架(157)通过减震弹簧(14)和板簧支撑(13)安装在底盘(2)上、后方的横向圆轴支架(157)通过板簧支撑(13)安装在底盘(2)上。
8.进一步地,前臂装置(3)包括起落机构和倾角调节机构(38);起落机构包括设在车身(1)上的大臂(32)、与大臂(32)铰接的小臂(36)和驱动小臂(36)起落的液压缸一(33);倾角调节机构(38)设在小臂(36)末端,包括两对在竖向呈八字排列的液压缸二(381),液压缸二(381)的伸长端通过活动支座(38)与平台(39)连接。
9.进一步地,粗平装置(4)包括斗背(49)、伸缩端与斗背(49)连接的液压拉杆(47)以及设在前臂装置(3)平台(39)上的液压缸一(41)、液压缸二(42)和斜杆(45),液压缸一(41)的伸缩端与液压拉杆(47)的缸体上部铰接,斜杆(45)铰接在液压拉杆(47)的缸体上且位于液压缸一(41)铰点的下方,液压缸二(42)的伸缩端与斜杆(45)中部铰接,斗齿(48)排列在斗背(49)下侧。
10.进一步地,整平装置(5)采用三段整平铲(53),中间的整平铲(53)设在前臂装置(3)平台(39)上,两边的整平铲(53)的铲体滑套在中间的整平铲(53)的铲体上,中间的整平铲(53)的后侧两端均设有液压推杆(51),两边的整平铲(53)的外端均设有活动端板(52),液压推杆(51)的伸缩端与所在侧的活动端板(52)连接。
11.进一步地,碾实装置(6)包括设在前臂装置(3)平台(39)上的安装板(62)、设在安装板(62)两侧的导轨(66)和液压杆(65)、与导轨(66)配合的安装框(61),液压杆(65)的伸缩端与安装框(61)连接,羊足碾(63)设在安装框(61)上。
12.进一步地,后臂装置(7)包括起落机构和倾角调节机构(78);起落机构包括设在车身(1)上的大臂(72)、与大臂(72)铰接的小臂(76)和驱动小臂(76)起落的液压缸一(73);倾角调节机构(78)设在小臂(76)末端,包括伺服电机(781)、与伺服电机(781)连接的齿轮组件(782),平台(79)安装在齿轮组件(782)的输出轴(783)上。
13.进一步地,在夯实装置(8)中,液压振动夯(81)滑动安装在平台(79)上,液压振动夯(81)以中间为界分为左右两组,每组的边缘均设有活动端板(83),每组的活动端板(83)分别与液压推杆(82)连接,液压推杆(82)用于带动所在组的液压振动夯(81)横移。
14.进一步地,边缘压实装置(10)包括横移机构、二轴机构(101)和液压杆(104),横移机构包括横向滑动安装在车身(1)上的横移架(108)、固设在车身(1)上的横向齿条(105)、设在横移架(108)上的电机(107),电机(107)通过齿轮传动与横向齿条(105)啮合;二轴机构(101)包括横向的齿轮盘(1017)、通过竖撑板(1018)支撑安装在齿轮盘(1017)上的横轴(1013)、设在横轴(1013)上的竖向齿轮(1016)、空穿齿轮盘(1017)中心的竖轴(1014)、设在竖轴(1014)上的同心齿轮(1015)、伺服电机一(1011)和伺服电机二(1012),伺服电机一(1011)通过蜗杆与同心齿轮(1015)啮合,同心齿轮(1015)与竖向齿轮(1016)啮合,伺服电机二(1012)通过蜗杆与齿轮盘(1017)啮合;液压杆(104)的缸体安装在横轴(1013)上、伸缩端通过向下弯折的连杆与小液压振动夯(102)连接。
15.进一步地,还包括控制系统,控制系统包括定位模块(201)、边坡激光测距模块(202)、边坡倾角检测模块(203)、无线接收单元(204)、数据储存模块(205)、云端控制模块
(206)、中央处理服务器(207)和安全监控模块(208);定位模块(201)包括设在车身(1)上的高精度定位器(12),用于收集所在位置的地理坐标数据,获得位置信息;边坡激光测距模块(202)包括设在后臂装置(7)平台(79)上的红外激光测距仪(710),用于检测所在位置与坡面的实时距离数据,获得距离信息;边坡倾角检测模块(203)包括设在前臂装置(3)平台(39)上的倾角传感器(37)、设在后臂装置(7)平台(79)上的倾角传感器(77)、设在小液压振动夯(102)上的倾角传感器(103),用于收集所在位置的方向和角度数据,获得倾角信息;无线接收单元(204)包括设在车身(1)上的无线接收器(11),用于将位置信息、距离信息和倾角信息传输给数据储存模块(205);数据储存模块(205)用于储存位置信息、距离信息和倾角信息并实时传输给中央处理服务器(207),还储存中央处理服务器(207)备份的动作指令;中央处理服务器(207)根据位置信息确定漏压及欠压位置、根据距离信息和倾角信息确定设备的三维姿态,向安全监控模块(208)上传设备的三维姿态,结合漏压及欠压位置、当前三维姿态和夯实要求得出设备所需调整的动作,并向云端控制模块(206)发送动作指令;云端控制模块(206)用于接收动作指令,并向设备的各执行部件发送相应的控制指令;安全监控模块(208)用于接收并分析设备的三维姿态,当确定设备存在倾覆风险时,向中央处理服务器(207)发送应急控制指令,再由中央处理服务器(207)通过云端控制模块(206)应急控制设备,防止设备倾覆。
16.本发明的有益效果是:
17.该设备能对路基斜坡一体进行粗平、整平、夯实、洒水作业,增加了边坡的稳定性和抗水毁性,施工效率高,适应各尺寸的斜坡,保证了压实效果,无需刷坡,解决超宽填筑土方量大、路基边坡压实质量低的问题,减少了土方量和施工费用。
18.本设备的底盘(2),分动箱(21)将发动机(23)的扭矩分送给前桥(26)和后桥(25),适应复杂路况,双万向节(22)实现了行走时路面高度起伏下仍然能传递动力,锥齿联轴器(28)既能将斜向动力传输成水平动力,又能保证行驶过程中路面不平时变角度的连续输送动力,在锥齿联轴器(28)的作用下,完全满足一般路基边坡的坡率,使得底盘(2)能适应斜坡的坡度、宽度和走向。车身(1)减震安装,避免对车上设备的破坏,车身(1)通过液压推杆(159)连接配重车(16),起到防翻的作用,避免坡度过大侧翻。
19.本设备的前臂装置(3)和后臂装置(7),既能调节倾角使粗平装置(4)、整平装置(5)、碾实装置(6)和夯实装置(8)始终法向作用于路基边坡上,又能调节距坡面的间距,粗平装置(4)利用能调节高度和角度的斗齿(48)对土石混合边坡进行粗平,保证土石混合的均匀性,整平装置(5)利用能调节宽度的整平铲(53)对粗平的土石混合和土质边坡表面进行反复整平,碾实装置(6)利用能升降的羊足碾(63)对整平的边坡进行碾实,夯实装置(8)利用能横移的液压振动夯(81)对边坡进行夯实,边缘压实装置(10)利用能平面运动的小液压振动夯(102)对边坡边缘范围内的死角位置进行补充压实,洒水装置(9)利用喷嘴(91)保证边坡压实时路基土在最佳含水率
±
2%的范围。
附图说明
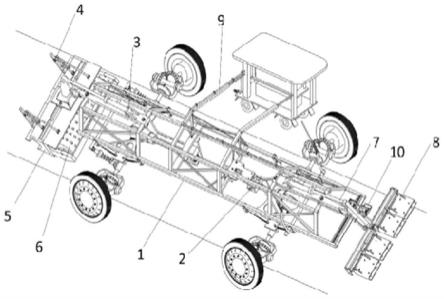
20.图1是本发明实施例的设备总体结构示意图一。
21.图2是本发明实施例的设备总体结构示意图二。
22.图3是本发明实施例中底盘和车身的爆炸示意图。
23.图4是本发明实施例中无线接收器的示意图。
24.图5是本发明实施例中高精度定位器的示意图。
25.图6是本发明实施例中板簧支撑的示意图。
26.图7是本发明实施例中减震弹簧的示意图。
27.图8是本发明实施例中车架的示意图。
28.图9是本发明实施例中底盘的示意图。
29.图10是本发明实施例中锥齿联轴器的示意图。
30.图11是本发明实施例中前臂装置的结构示意图。
31.图12是本发明实施例中前臂装置的倾角传感器的示意图。
32.图13是本发明实施例中前臂装置的倾角调节机构的结构示意图。
33.图14是本发明实施例中粗平装置的结构示意图。
34.图15是本发明实施例中整平装置的结构示意图。
35.图16是本发明实施例中碾实装置的结构示意图。
36.图17是本发明实施例中后臂装置的结构示意图。
37.图18是本发明实施例中前臂装置的倾角调节机构的结构示意图。
38.图19是本发明实施例中红外激光测距仪的示意图。
39.图20是本发明实施例中夯实装置的结构示意图。
40.图21是本发明实施例中洒水装置的结构示意图。
41.图22是本发明实施例中边缘压实装置的结构示意图。
42.图23是本发明实施例中二轴机构的示意图。
43.图24是本发明实施例中控制系统的原理图。
44.图中:
45.1-车身;11-无线接收器;12-高精度定位器;13-板簧支撑;131-板簧;132-固定件;133-u型卡;134-板托;135-上弓卡子;14-减震弹簧;15-车架;150-转轴;151-横梁;152-上纵梁;153-下纵梁;154-y形梁;155-斜支撑;156-横框梁;157-横向圆轴支架;158-角板;159-液压推杆;16-配重车;
46.2-底盘;21-分动箱;22-双万向节;23-发动机;24-传动轴;25-后桥;26-前桥;27-伸缩轴;28-锥齿联轴器;281-车轮轴;282-竖向连心轴;283-锥齿轮一;284-锥齿轮二;285-锥齿轮三;286-限位框一;287-限位框二;29-行驶轮;
47.3-前臂装置;31-大臂座;32-大臂;33-液压缸一;34-连接销;35-连接板;36-小臂;37-倾角传感器;38-倾角调节机构;381-液压缸二;382-活动支座;39-平台;
48.4-粗平装置;41-液压缸一;42-液压缸二;43-耳座;44-双耳座;45-斜杆;46-连接销;47-液压拉杆;48-斗齿;49-斗背;
49.5-整平装置;51-液压推杆;52-活动端板;53-整平铲;
50.6-碾实装置;61-安装框;62-安装板;63-羊足碾;64-连接件;65-液压杆;66-导轨;
51.7-后臂装置;71-大臂座;72-大臂;73-液压缸一;74-连接销;75-连接板;76-小臂;77-倾角传感器;78-倾角调节机构;781-伺服电机;782-齿轮组件;783-输出轴;79-连接端板;710-红外激光测距仪;
52.8-夯实装置;81-液压振动夯;82-液压推杆;83-活动端板;
53.9-洒水装置;91-喷嘴;92-水管;93-卡件;94-止水阀;
54.10-边缘压实装置;101-二轴机构;1011-伺服电机一;1012-伺服电机二;1013-横轴;1014-竖轴;1015-同心齿轮;1016-竖向齿轮;1017-齿轮盘;1018-竖撑板;102-小液压振动夯;103-倾角传感器;104-液压杆;105-横向齿条;106-滑杆;107-电机;108-横移架;109-底板;
55.201-定位模块;202-边坡激光测距模块;203-边坡倾角检测模块;204-无线接收单元;205-数据储存模块;206-云端控制模块;2061-液压控制模块;2062-启停动控制模块;2063-电机控制模块;207-中央处理服务器;208-安全监控模块。
具体实施方式
56.下面结合附图和实施例对本发明作进一步的说明。
57.如图1、图2和图23所示,一种匹配路基边坡的斜坡式多功能夯实一体化设备,包括车身1、底盘2、前臂装置3、粗平装置4、整平装置5、碾实装置6、后臂装置7、夯实装置8、洒水装置9、边缘压实装置10和控制系统。
58.如图3、图6和图7所示,车身1减震的安装在底盘2上,车身1一侧通过液压推杆159连接有用于在坡顶行走防翻的配重车16;如图8所示,在车身1中,车架15包括一对上纵梁152、一对下纵梁153、若干个连接在下纵梁153之间的横梁151、若干个将上纵梁152和下纵梁153连接的横框梁156、若干个加强在上纵梁152和下纵梁153之间的斜支撑155、若干个对称加强在下纵梁153和横梁151之间的y形梁154、若干个对称加强在y形梁154与下纵梁153和横梁151之间的角板158、贯穿并固定在一对下纵梁153上的横向圆轴支架157,前方的横向圆轴支架157通过减震弹簧14和板簧支撑13安装在底盘2上、后方的横向圆轴支架157通过板簧支撑13安装在底盘2上;上纵梁152、下纵梁153、横梁151、横框梁156组成车架15的主体结构,采用焊接固定,斜支撑155、y形梁154、角板158组成车架15的加固结构,采用螺栓或焊接固定,减震弹簧14和板簧支撑13作为减震结构,横向圆轴支架157通过减震结构分别与底盘2的前桥26和后桥25连接;如图6所示,板簧支撑13包括板簧131、固定件132、u型卡133、板托134和上弓卡子135;如图3和图8所示,车架15在中部位置通过转轴150与液压推杆159铰接;如图3至图5所示,横梁151与y形梁154相接处的角板158上侧中心位置设有高精度定位器12,横向圆轴支架157空套有无线接收器11。
59.如图1至3、图9所示,底盘2用于横跨斜坡行走且能适应斜坡的坡度、宽度和走向,底盘2的发动机23通过分动箱21和带有双万向节22的传动轴24分别驱动前后桥(26、25),前后桥(26、25)的输出半轴均为伸缩轴27且均通过锥齿联轴器28与行驶轮29连接;如图10所示,在锥齿联轴器28中,锥齿轮一283的正面中心与车轮轴281连接,两者组合通过限位框二287的中心位置,锥齿轮三285的正面中心与伸缩轴27连接,两者组合通过限位框一286的中心位置,锥齿轮二284分别与锥齿轮一283和锥齿轮三285啮合,锥齿轮二284正面中心通过竖向连心轴282与限位框一286和限位框二287连接;发动机23和分动箱22通过螺栓和倒梯形的托板固定在车身1下侧的横梁151上。
60.如图1和图2所示,车身1的首端伸出的设有前臂装置3,前臂装置3的伸出端为能起落和调节倾角的平台,前臂装置3的平台39上从前往后依次设有粗平装置4、整平装置5和碾实装置6;如图11和图12所示,前臂装置3包括起落机构和倾角调节机构38,起落机构包括设
在车身1上的大臂32、与大臂32铰接的小臂36和驱动小臂36起落的液压缸一33,平台39上设有倾角传感器37,大臂32设在横框梁156上,液压缸一33通过大臂座31设在大臂32上表面,大臂32和小臂36通过连接销34和双耳板35铰接,如图13所示,倾角调节机构38设在小臂36末端,包括两对在竖向呈八字排列的液压缸二381,液压缸二381的伸长端通过活动支座38与平台39连接。
61.如图1和图2所示,粗平装置4的工作部均横向设置且为能调节高度和角度的斗齿48,如图14所示,粗平装置4包括斗背49、伸缩端与斗背49连接的液压拉杆47以及设在前臂装置3平台39上的液压缸一41、液压缸二42和斜杆45,液压缸一41的伸缩端与液压拉杆47的缸体上部铰接,斜杆45铰接在液压拉杆47的缸体上且位于液压缸一41铰点的下方,液压缸二42的伸缩端与斜杆45中部铰接,斗齿48排列在斗背49下侧,液压缸一41、液压缸二42和斜杆45均通过耳座43铰接在前臂装置3平台39上,液压缸一41的伸缩端通过双耳座44与液压拉杆47的缸体上部铰接,铰接处采用连接销46。当路基边坡为土石边坡,液压缸一41和液压缸二42伸长使斗背49平行于路基边坡,液压拉杆47调节斗齿48距边坡表面的距离,控制斗齿48的耙深。
62.如图1和图2所示,整平装置5的工作部横向设置且为能调节宽度的整平铲53,如图15所示,整平装置5采用三段整平铲53,中间的整平铲53设在前臂装置3平台39上,两边的整平铲53的铲体滑套在中间的整平铲53的铲体上,中间的整平铲53的后侧两端均设有液压推杆51,两边的整平铲53的外端均设有活动端板52,液压推杆51的伸缩端与所在侧的活动端板52连接。液压推杆53根据边坡宽度调节整平铲53的整体宽度。
63.如图1和图2所示,碾实装置6的工作部横向设置且为能升降的羊足碾63,如图16所示,碾实装置6包括设在前臂装置3平台39上的安装板62、设在安装板62两侧的导轨66和液压杆65、与导轨66配合的安装框61,液压杆65的伸缩端与安装框61连接,羊足碾63设在安装框61上。碾实装置6主要用于黏性土边坡的压实作业,在进行压实作业前,前臂装置3平台39倾角与路基边坡倾角的匹配,然后通过液压杆65向下移动接触路基边坡后进行夯实作业,完成夯实作业后液压杆65向上移动,并保持与路基边坡表面一定距离。
64.如图1和图2所示,车身1的尾端伸出的设有后臂装置7,后臂装置7的伸出端为能起落和调节倾角的平台,后臂装置7的平台79上设有夯实装置8;如图17至图19所示,后臂装置7包括起落机构和倾角调节机构78,起落机构包括设在车身1上的大臂72、与大臂72铰接的小臂76和驱动小臂76起落的液压缸一73;倾角调节机构78设在小臂76末端,包括伺服电机781、与伺服电机781连接的齿轮组件782,平台79安装在齿轮组件782的输出轴783上,平台79上设有红外激光测距仪710和倾角传感器77,大臂72设在横框梁156上,液压缸一73通过大臂座71设在大臂72上表面,大臂72和小臂76通过连接销74和双耳板75铰接。
65.如图1和图2所示,夯实装置8的工作部横向设置且为能横移的液压振动夯81,如图20所示,在夯实装置8中,液压振动夯81滑动安装在平台79上,液压振动夯81以中间为界分为左右两组,每组的边缘均设有活动端板83,每组的活动端板83分别与液压推杆82连接,液压推杆82用于带动所在组的液压振动夯81横移。在进行压实作业前,平台79倾角与路基边坡倾角的匹配,然后通过后臂装置7的液压缸一73带动小臂76向下移动接触路基边坡后根据压实遍数进行反复的夯实作业,完成夯实作业后小臂76向上移动,并保持与路基边坡表面一定距离。
66.如图1和图2所示,车身1后部设有洒水装置9,洒水装置9的水源设在配重车16上、喷嘴91横向分布;如图21所示,在洒水装置9中,水管92沿线由卡件93限制且具有冗余度,水管92上设有止水阀94,喷嘴91分布在水管92末段,水管92末段设在平台79上。
67.如图1和图2所示,车身1后部设有边缘压实装置10,边缘压实装置10采用能平面运动的小液压振动夯102;如图22和图23所示,边缘压实装置10包括横移机构、二轴机构101和液压杆104,横移机构包括横向滑动安装在车身1上的横移架108、固设在车身1上的横向齿条105、设在横移架108上的电机107,电机107通过齿轮传动与横向齿条105啮合;二轴机构101包括横向的齿轮盘1017、通过竖撑板1018支撑安装在齿轮盘1017上的横轴1013、设在横轴1013上的竖向齿轮1016、空穿齿轮盘1017中心的竖轴1014、设在竖轴1014上的同心齿轮1015、伺服电机一1011和伺服电机二1012,伺服电机一1011通过蜗杆与同心齿轮1015啮合,同心齿轮1015与竖向齿轮1016啮合,伺服电机二1012通过蜗杆与齿轮盘1017啮合;液压杆104的缸体安装在横轴1013上、伸缩端通过向下弯折的连杆与小液压振动夯102连接。横移架108横向滑动安装在滑杆106上,滑杆106和横向齿条105均固设在底板109上,底板109设在下纵梁153上。
68.如图24所示,控制系统包括定位模块201、边坡激光测距模块202、边坡倾角检测模块203、无线接收单元204、数据储存模块205、云端控制模块206、中央处理服务器207和安全监控模块208;定位模块201包括设在车身1上的高精度定位器12,用于收集所在位置的地理坐标数据,获得位置信息;边坡激光测距模块202包括设在后臂装置7平台79上的红外激光测距仪710,用于检测所在位置与坡面的实时距离数据,获得距离信息;边坡倾角检测模块203包括设在前臂装置3平台39上的倾角传感器37、设在后臂装置7平台79上的倾角传感器77、设在小液压振动夯102上的倾角传感器103,用于收集所在位置的方向和角度数据,获得倾角信息;无线接收单元204包括设在车身1上的无线接收器11,用于将位置信息、距离信息和倾角信息传输给数据储存模块205;数据储存模块205用于储存位置信息、距离信息和倾角信息并实时传输给中央处理服务器207,还储存中央处理服务器207备份的动作指令;中央处理服务器207根据位置信息确定漏压及欠压位置、根据距离信息和倾角信息确定设备的三维姿态,向安全监控模块208上传设备的三维姿态,结合漏压及欠压位置、当前三维姿态和夯实要求(各分项装置的工作部与坡面平行,与坡面的距离根据夯实需求及设备功率确定)得出设备所需调整的动作,并向云端控制模块206发送动作指令;云端控制模块206用于接收动作指令,并向设备的各执行部件发送相应的控制指令;安全监控模块208用于接收并分析设备的三维姿态,当确定设备存在倾覆风险时,向中央处理服务器207发送应急控制指令,再由中央处理服务器207通过云端控制模块206应急控制设备,防止设备倾覆。云端控制模块206分为三个子模块,液压控制模块2061、启停控制模块2062和电机控制模块2063,对应设备的各执行部件。控制系统实现了整个作业过程的智能远程控制,仅仅需要现场管理人员进行辅助性的监视工作即可,自动化程度高、实时性强,保障了设备的安全性和可靠性,当倾角变化大于5
°
且距离变化大于20cm时,则安全监控模块208立即发送警报命令。
69.该设备能对路基斜坡一体进行粗平、整平、夯实、洒水作业,增加了边坡的稳定性和抗水毁性,施工效率高,适应各尺寸的斜坡,保证了压实效果,无需刷坡,解决超宽填筑土方量大、路基边坡压实质量低的问题,减少了土方量和施工费用。边坡高度《10m的边坡可以进行一次性压实,边坡高度10~20m时,下部高度(h≤12m)部分仅仅需要加宽填筑0.6m宽度
的台阶,当边坡高度》20m时,边坡形式本就是阶梯型,完全可以实现无超宽填筑进行边坡压实。
70.本设备的底盘2,分动箱21将发动机23的扭矩分送给前桥26和后桥25,适应复杂路况,双万向节22实现了行走时路面高度起伏下仍然能传递动力,锥齿联轴器28既能将斜向动力传输成水平动力,又能保证行驶过程中路面不平时变角度的连续输送动力,在锥齿联轴器28的作用下,完全满足一般路基边坡的坡率(伸缩轴27与行驶轮29的车轮轴281间最大变动角度达到
±
70
°
),使得底盘2能适应斜坡的坡度、宽度和走向。车身1减震安装,避免对车上设备的破坏,车身1通过液压推杆159连接配重车16,起到防翻的作用,避免坡度过大侧翻。
71.本设备的前臂装置3和后臂装置7,既能调节倾角使粗平装置4、整平装置5、碾实装置6和夯实装置8始终法向作用于路基边坡上,又能调节距坡面的间距,粗平装置4利用能调节高度和角度的斗齿48对土石混合边坡进行粗平,保证土石混合的均匀性,整平装置5利用能调节宽度的整平铲53对粗平的土石混合和土质边坡表面进行反复整平,碾实装置6利用能升降的羊足碾63对整平的边坡进行碾实,夯实装置8利用能横移的液压振动夯81对边坡进行夯实,边缘压实装置10利用能平面运动的小液压振动夯102对边坡边缘范围内的死角位置进行补充压实,洒水装置9利用喷嘴91保证边坡压实时路基土在最佳含水率
±
2%的范围。
72.为了使本领域技术人员更好地理解本发明的技术方案,本部分的描述仅是示范性和解释性,不应对本发明的保护范围有任何的限制。在本发明的描述中,需要理解的是,术语“平行”、“垂直”、“底部”、“顶部”、“中部”、“一端”、“另一端”、“两端”、“外侧”、“内侧”、“顶部”、“内部”、“前部”、“中部”等指示的方位或位置关系为基于附图所示的方位或位置关系,仅是为了便于描述本发明和简化描述,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本发明的限制。此外,术语“第一”、“第二”仅用于描述目的,而不能理解为指示或暗示相对重要性或者隐含指明所指示的技术特征的数量。除非另有明确的规定和限定,术语“安装”、“相连"、“连接”、“固定”等术语应做广义理解,例如,可以是固定连接,也可以是可拆卸连接,或一体地连接;可以是机械连接,也可以是电连接;可以是直接相连,也可以通过中间媒介间接相连,可以是两个元件内部的连通。对于本领域的普通技术人员而言,可以根据具体情况理解上述术语在本发明中的具体含义。应当理解的是,对本领域普通技术人员来说,可以根据上述说明加以改进或变换,而所有这些改进和变换都应属于本发明所附权利要求的保护范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1