一种水电站大坝混凝土振捣机器人的制作方法
1.本实用新型涉及水电站工程技术领域,尤其是一种水电站大坝混凝土振捣机器人。
背景技术:
2.现有水电站大坝混凝土振捣通常通过插入手持式振捣棒进行人工振捣,人工振捣时,受环境、人为因素影响,振捣随意性较大,振捣质量得不到保障,并且需要工人根据仓面情况频繁拖动、拔插振捣棒,工作强度高、振捣效率低,不利于大规模使用。
技术实现要素:
3.本实用新型解决的技术问题是提供一种振捣效率高、振捣质量较好的水电站大坝混凝土振捣机器人。
4.本实用新型解决其技术问题所采用的技术方案是:一种水电站大坝混凝土振捣机器人,包括行驶模块、振捣棒位置调整模块、振捣施工组合控制模块和振捣棒,振捣棒位置调整模块设置在行驶模块上,振捣施工组合控制模块设置在振捣棒位置调整模块上,振捣棒设置在振捣施工组合控制模块的前端。
5.进一步的是,行驶模块为履带式结构,行驶模块包括底盘架、履带轮、履带和第一动力件,履带轮设置在底盘架的两侧,履带匹配设置在对应的履带轮上,第一动力件设置在底盘架中,第一动力件通过第一传动机构与履带轮相连接。
6.进一步的是,振捣棒位置调整模块包括旋转平台组件和前后移动组件;
7.旋转平台组件包括转盘机构、承载平台和第二动力件,转盘机构、第二动力件设置在行驶模块上,承载平台水平设置在转盘机构上,第二动力件通过第二传动机构与转盘机构相连接,转盘机构能够使承载平台在水平面上来回旋转。
8.进一步的是,前后移动组件包括两根第一滑轨、多块第一滑块、滑动安装板、第三动力件和第三传动机构,两根第一滑轨沿承载平台长度方向相互平行设置在承载平台上,每根第一滑轨上至少设置有一块第一滑块,滑动安装板水平设置在第一滑块上,第三动力件设置在承载平台上,第三动力件通过第三传动机构与滑动安装板相连接,第三动力件经第三传动机构能够使滑动安装板在第一滑轨上来回移动。
9.进一步的是,振捣施工组合控制模块包括前竖滑动架、后竖滑动架和平衡臂,前竖滑动架、后竖滑动架沿振捣棒位置调整模块长度方向间隔设置,前竖滑动架、后竖滑动架竖向设置在振捣棒位置调整模块上,平衡臂一端与前竖滑动架铰接连接在一起,另一端与后竖滑动架铰接连接在一起。
10.进一步的是,前竖滑动架包括第一架体,第一架体竖向设置在振捣棒位置调整模块上,第一架体上设置有竖向方向的第二滑轨、第四动力件和第四传动机构,第二滑轨上设置有第二滑块,第四动力件经第四传动机构能够使第二滑块在第二滑轨上下来回移动;
11.后竖滑动架包括第二架体,第二架体竖向设置在振捣棒位置调整模块上,第二架
体上设置有竖向方向的第三滑轨、第五动力件和第五传动机构,第三滑轨上设置有第三滑块,第五动力件经第五传动机构能够使第三滑块在第三滑轨上下来回移动,第二横臂侧铰座设置在第三滑块上;
12.第二滑块沿振捣棒位置调整模块长度方向设置,且第二滑块与第三滑块相互垂直设置;
13.平衡臂包括第一横臂侧铰座、伸缩机构,第一横臂侧铰座通过第一铰轴铰接在第二滑块上,伸缩机构一端与第一横臂侧铰座相连接,另一端与第二横臂侧铰座通过第二铰轴铰接连接在一起。
14.进一步的是,振捣施工组合控制模块还包括机械臂摆动组件,机械臂摆动组件包括机械臂、第一机械臂侧铰座、连接轴和第六动力件;
15.平衡臂上还设置有第三横臂侧铰座,第三横臂侧铰座连接设置在第一横臂侧铰座的左侧,第三横臂侧铰座中设置有转孔,连接轴匹配设置在转孔中,第六动力件设置在第三横臂侧铰座上,第六动力件与连接轴相连接,且第六动力件能够使连接轴在转孔中旋转;
16.第一机械臂侧铰座上设置有通孔,连接轴匹配穿过通孔并通过固定件与第一机械臂侧铰座固定连接,机械臂的后端与第一机械臂侧铰座相连接。
17.进一步的是,还包括振捣棒连接接头,振捣棒连接接头包括连接横板,多个振捣棒通过连接机构可拆卸设置在连接横板上。
18.进一步的是,振捣施工组合控制模块还包括上下摆动组件,上下摆动组件包括摆动臂、摆动臂驱动件、第一连接铰座和第二连接铰座;
19.第一连接铰座设置在机械臂的前端,第二连接铰座设置在连接横板的中间,第一连接铰座与第二连接铰座通过第三铰轴铰接连接在一起,摆动臂通过第三铰轴与第二连接铰座铰接连接在一起;
20.摆动臂驱动件的后端铰接在机械臂的侧壁上,摆动臂驱动件的前端与摆动臂的后端铰接连接在一起。
21.进一步的是,还包括控制模块和电源模块。
22.本实用新型的有益效果是:一种水电站大坝混凝土振捣机器人,包括行驶模块、振捣棒位置调整模块、振捣施工组合控制模块和振捣棒。行驶模块使机器人具有行驶能力,便于整体移动;振捣棒位置调整模块使振捣施工组合控制模块能够在行驶模块上来回旋转和前后移动,使振捣施工组合控制模块实现不同位置的灵活调整,进而能够带动振捣棒更加灵活地、多方位变轨迹振捣施工作业,增加整个机器人振捣施工作业的覆盖面积,还可以灵活、可靠地调整施工重心,降低因重心不稳而引起的侧翻等施工事故发生的可能性;振捣施工组合控制模块既可以使振捣棒实现高度方向的平移升降动作,又可以使振捣棒实现高度方向的多种摆线运行动作,还可以使振捣棒实现左右方向的摆动折叠动作,施工运行轨迹多样且高度灵活、高度精准,满足于振捣施工作业的高技术要求。可见,本实用新型水电站大坝混凝土振捣机器人结构精巧,无需人员在机器人中驾驶,施工标准化和自动化,能够适用于水电站大坝混凝土现场各种仓面的混凝土振捣施工,从而有效地显著降低了人工强度,提高振捣施工的效率和质量,运行成本也较低,利于大规模使用。
附图说明
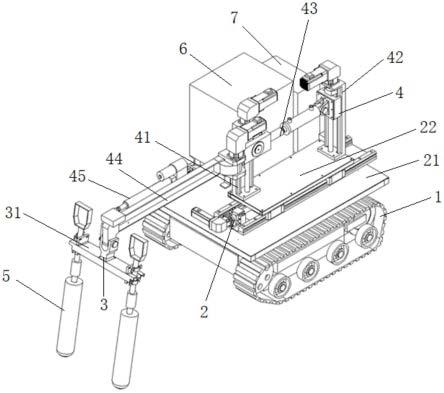
23.图1是本实用新型的结构示意图;
24.图2是行驶模块与旋转平台组件的结构示意图;
25.图3是前后移动组件的结构示意图;
26.图4是振捣施工组合控制模块的结构示意图;
27.图中标记为:行驶模块1、底盘架11、履带轮12、履带13、振捣棒位置调整模块2、旋转平台组件21、承载平台211、前后移动组件22、第一滑轨221、第一滑块222、滑动安装板223、第三动力件224、第三传动机构225、振捣棒连接接头3、连接横板31、振捣施工组合控制模块4、前竖滑动架41、第一架体411、第四动力件412、第四传动机构413、后竖滑动架42、第二架体421、第五动力件422、第五传动机构423、第三滑块424、第二横臂侧铰座425、平衡臂43、第一横臂侧铰座431、伸缩机构432、第三横臂侧铰座433、套筒434、机械臂摆动组件44、机械臂441、第一机械臂侧铰座442、第六动力件443、上下摆动组件45、摆动臂451、摆动臂驱动件452、第一连接铰座453、第二连接铰座454、振捣棒5、控制模块6、电源模块7。
具体实施方式
28.下面结合附图和具体实施方式对本实用新型进一步说明。
29.如图1、图2、图3、图4所示,本实用新型一种水电站大坝混凝土振捣机器人,包括行驶模块1、振捣棒位置调整模块2、振捣施工组合控制模块4和振捣棒5,振捣棒位置调整模块2设置在行驶模块1上,振捣施工组合控制模块4设置在振捣棒位置调整模块2上,振捣棒5设置在振捣施工组合控制模块4的前端。
30.行驶模块1使机器人具有行驶能力,便于整体移动。根据水电站大坝混凝土振捣施工的环境,本实用新型行驶模块1优选的一种结构为:再如图1、图2所示,行驶模块1为履带式结构,行驶模块1包括底盘架11、履带轮12、履带13和第一动力件,履带轮12设置在底盘架11的两侧,履带13匹配设置在对应的履带轮12上,第一动力件设置在底盘架11中,第一动力件通过第一传动机构与履带轮12相连接。底盘架11作为承载基体,其材质为钢材,履带轮12主要由驱动轮、诱导轮、托带轮等组成,第一动力件为伺服行走电机,便于自动控制。行驶模块1的驾驶系统可以采用已成熟的红外远程遥控驾驶技术,无需人员在机器人中驾驶,通过无人驾驶技术使行驶模块1实现可控的行走功能。
31.振捣棒位置调整模块2的作用是使振捣施工组合控制模块4能够在行驶模块1上来回旋转和前后移动,使振捣施工组合控制模块4实现不同位置的灵活调整,进而能够带动振捣棒5更加灵活地、多方位变轨迹振捣施工作业。本实用新型振捣棒位置调整模块2优选的一种结构为:再如图1、图2、图3、图4所示,振捣棒位置调整模块2包括旋转平台组件21和前后移动组件22。旋转平台组件21包括转盘机构、承载平台211和第二动力件,转盘机构、第二动力件设置在行驶模块1上,承载平台211水平设置在转盘机构上,第二动力件通过第二传动机构与转盘机构相连接,转盘机构能够使承载平台211在水平面上来回旋转,进而带动捣施工组合控制模块4在水平面上来回旋转。转盘机构优选为转盘轴承,转盘轴承的外圈/内圈与行驶模块1的底盘架11顶部形成固定连接,其内圈/外圈与承载平台22的底部形成固定连接。第二动力件优选为控制方便、精准的伺服电机,第二动力件的输出端与转盘机构实现啮合连接,旋转动力用作驱动转盘机构产生周向旋转动作。
32.再如图1、图3所示,前后移动组件22包括两根第一滑轨221、多块第一滑块222、滑动安装板223、第三动力件224和第三传动机构225,两根第一滑轨221沿承载平台211长度方向相互平行设置在承载平台211上,每根第一滑轨221上至少设置有一块第一滑块222,滑动安装板223水平设置在第一滑块222上,第三动力件224设置在承载平台211上,第三动力件224通过第三传动机构225与滑动安装板223相连接,第三动力件224经第三传动机构225能够使滑动安装板223在第一滑轨221上来回移动,进而使振捣施工组合控制模块4前后往复移动。第三动力件224优选为控制方便、精准的伺服电机,第三传动机构225优选为丝杆传动机构,丝杆传动机构包括丝杆,丝杆沿承载平台211长度方向设置,丝杆设置在两根第一滑轨221之间,丝杆与滑动安装板223的底部形成螺纹连接,例如在滑动安装板223的底部固定匹配于丝杆的螺母。为了便于丝杆转动,丝杆的两端分别设置有一组轴承组件。
33.本实用新型的振捣棒位置调整模块2不但能够使振捣施工组合控制模块4能够在行驶模块1来回旋转和前后移动,使振捣施工组合控制模块4实现不同位置的灵活调整,进而能够带动振捣棒5更加灵活地、多方位变轨迹振捣施工作业,增加整个机器人振捣施工作业的覆盖面积,还能够灵活、可靠地调整机器人施工重心,降低因重心不稳而引起的侧翻等施工事故发生的可能性。
34.振捣施工组合控制模块4作为振捣棒5振捣施工的控制模块,其决定了振捣棒5施工运行轨迹、振捣施工的质量和效率,本实用新型振捣施工组合控制模块4优选的一种结构为:再如图1、图4所示,振捣施工组合控制模块4包括前竖滑动架41、后竖滑动架42和平衡臂43,前竖滑动架41、后竖滑动架42沿振捣棒位置调整模块2长度方向间隔设置,前竖滑动架41、后竖滑动架42竖向设置在振捣棒位置调整模块2上,平衡臂43一端与前竖滑动架41铰接连接在一起,另一端与后竖滑动架42铰接连接在一起。前竖滑动架41包括第一架体411,第一架体411竖向设置在振捣棒位置调整模块2上,第一架体411上设置有竖向方向的第二滑轨、第四动力件412和第四传动机构413,第二滑轨上设置有第二滑块,第四动力件412经第四传动机构413能够使第二滑块在第二滑轨上下来回移动;后竖滑动架42包括第二架体421,第二架体421竖向设置在振捣棒位置调整模块2上,第二架体421上设置有竖向方向的第三滑轨、第五动力件422和第五传动机构423,第三滑轨上设置有第三滑块424,第五动力件422经第五传动机构423能够使第三滑块424在第三滑轨上下来回移动,第二横臂侧铰座425设置在第三滑块424上;第二滑块沿振捣棒位置调整模块2长度方向设置,且第二滑块与第三滑块424相互垂直设置;平衡臂43包括第一横臂侧铰座431、伸缩机构432,第一横臂侧铰座431通过第一铰轴铰接在第二滑块上,伸缩机构432一端与第一横臂侧铰座431相连接,另一端与第二横臂侧铰座425通过第二铰轴铰接连接在一起。当第二滑块、第三滑块424同步升降位移时,则平衡臂43随之进行上下平移运行;当第二滑块、第三滑块424任意一个升降位移而另外一个保持固定时,则平衡臂43随之进行单支点的摆线运行,当第二滑块、第三滑块424进行反向升降位移(即一个上行时、另一个正下行)时,则平衡臂43随之进行交叉的摆线运行,从而使平衡臂43带动振捣棒5实现高度方向的平移升降动作和高度方向的多种摆线运行动作,保证振捣施工的质量。
35.第四动力件412、第五动力件422优选为控制方便、精准的伺服电机,第四传动机构413、第五传动机构423优选为丝杆传动机构,该动力传动机构整体结构简单、体积小、使用效果好、易于维护。伸缩机构432的作用是调节第二滑块、第三滑块424在不等高状态下滑动
位移时的平衡臂43长度变化,伸缩机构432优选为油缸组件,为了便于使用,还可在油缸组件活塞杆的端部设置套管434,套管434为活塞杆的加长结构。
36.为了增强前竖滑动架41和后竖滑动架42之间相对位置的结构强度,在前竖滑动架41和后竖滑动架42之间还可设置有支撑板,支撑板可以采用三角撑等代替。
37.为了更进一步提高振捣棒5的振捣施工质量,使振捣棒5实现更多的施工动作,再如图1、图4所示,本实用新型的振捣施工组合控制模块4还包括机械臂摆动组件44,机械臂摆动组件44包括机械臂441、第一机械臂侧铰座442、连接轴和第六动力件443;平衡臂43上还设置有第三横臂侧铰座433,第三横臂侧铰座433连接设置在第一横臂侧铰座431的左侧,第三横臂侧铰座433中设置有转孔,连接轴443匹配设置在转孔中,第六动力件443设置在第三横臂侧铰座433上,第六动力件443与连接轴443相连接,且第六动力件443能够使连接轴443在转孔中旋转;第一机械臂侧铰座442上设置有通孔,连接轴443匹配穿过通孔并通过固定件与第一机械臂侧铰座442固定连接,固定件优选为键,机械臂441的后端与第一机械臂侧铰座442相连接。第六动力件443优选为控制方便、精准的伺服电机,第六动力件443的输出轴旋转带动连接轴443旋转,连接轴443旋转带动机械臂441左右方向的摆动,进而带动振捣棒5实现左右方向的摆动折叠动作。
38.为了保证连接轴443稳定性及服役寿命,连接轴443通过轴承组件设置在第一机械臂侧铰座442的通孔以及第三横臂侧铰座433的转孔中,轴承组件能够使机械臂441的重力被有效地分散到平衡臂43上,减少作用在连杆轴443上的摩擦力,提高连接轴443稳定性及服役寿命。
39.为了根据实际情况设置振捣棒5的数量,进而提高振捣施工的质量和效率,也便于更换损坏的振捣棒5,再如图1、图4所示,本实用新型还设置有振捣棒连接接头3,振捣棒连接接头3包括连接横板31,多个振捣棒5通过连接机构可拆卸设置在连接横板31上。
40.为了再进一步提高振捣棒5的振捣施工质量,使振捣棒5实现更多的施工动作,再如图1、图4所示,本实用新型的振捣施工组合控制模块4还包括上下摆动组件45,上下摆动组件45包括摆动臂451、摆动臂驱动件452、第一连接铰座453和第二连接铰座454,第一连接铰座453设置在机械臂441的前端,第二连接铰座454设置在连接横板31的中间,第一连接铰座453与第二连接铰座454通过第三铰轴铰接连接在一起,摆动臂451通过第三铰轴与第二连接铰座454铰接连接在一起;摆动臂驱动件452的后端铰接在机械臂441的侧壁上,摆动臂驱动件452的前端与摆动臂451的后端铰接连接在一起。摆动臂驱动件452为驱动电机及传动杆组成,驱动电机优选为控制方便、精准的伺服电机,在摆动臂驱动件452的作用下,连接横板31以第三铰轴为支点,在机械臂441的前端处作上下方向的摆动,进而使振捣棒5实现高度方向的上下摆线运行动作。
41.为了更加便于机器人的自动运行,本实用新型还设置有控制模块6和电源模块7,控制模块6和电源模块7优选设置在行驶模块1的底盘架11上。控制模块6内部包含有控制机器人动作、远程数据接收和振捣数据发送的所有电子设备。电源模块7为机器人中各种电子设备提供电源。
42.综上所述,行驶模块1使机器人具有行驶能力,便于整体移动;振捣棒位置调整模块2使振捣施工组合控制模块4能够在行驶模块1上来回旋转和前后移动,使振捣施工组合控制模块4实现不同位置的灵活调整,进而能够带动振捣棒5更加灵活地、多方位变轨迹振
捣施工作业,增加整个机器人振捣施工作业的覆盖面积,还可以灵活、可靠地调整施工重心,降低因重心不稳而引起的侧翻等施工事故发生的可能性;振捣施工组合控制模块4既可以使振捣棒5实现高度方向的平移升降动作,又可以使振捣棒5实现高度方向的多种摆线运行动作,还可以使振捣棒5实现左右方向的摆动折叠动作,施工运行轨迹多样且高度灵活、高度精准,满足于振捣施工作业的高技术要求。可见,本实用新型水电站大坝混凝土振捣机器人结构精巧,无需人员在机器人中驾驶,施工标准化和自动化,能够适用于水电站大坝混凝土现场各种仓面的混凝土振捣施工,从而有效地显著降低了人工强度,提高振捣施工的效率和质量,运行成本也较低,利于大规模使用。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1