一种浮萍打捞装置
1.本实用新型涉及浮萍打捞,具体是涉及一种浮萍打捞装置。
背景技术:
2.浮萍生长需消耗水体中的氮、磷等营养盐,因此,少量浮萍的出现对水质具有一定净化作用,而不会对水体造成严重污染.但浮萍如大面积疯长,就会对水体造成严重污染,大面积的浮萍具有污染水质、威胁饮用水安全、遮盖河道、阻碍通航、滋生病菌、破坏水体生态平衡等危害,同时形成强烈的生物促淤作用导致草型湖泊迅速沼泽化,给这些地区的环境与经济可持续发展造成了不可挽回的损失。
3.目前,通常采用人工乘船打捞浮萍,耗费人力,打捞浮萍工人的劳动强度高,现有技术中存在大型的浮萍打捞装置,但是装置复杂,无法大规模应用。
技术实现要素:
4.实用新型目的:针对以上缺点,本实用新型提供一种自动化、结构简单的浮萍打捞装置。
5.技术方案:为解决上述问题,本实用新型采用一种浮萍打捞装置,包括船体、驱动船体运动的驱动装置、打捞臂和存储仓,所述船体内部设置容纳仓,容纳仓入口设置于船体前端,容纳仓底面向下凹陷形成存储仓,所述打捞臂包括第一打捞臂和第二打捞臂,第一打捞臂包括第一打捞板、第一舵机和第一连接臂,第一连接臂一端与船体固定连接,第一连接臂另一端通过第一舵机与第一打捞板铰接,第二打捞臂包括第二打捞板、第二舵机和第二连接臂,第二连接臂一端与船体固定连接,第二连接臂另一端通过第二舵机与第二打捞板铰接,第一打捞板和第二打捞板位于容纳仓入口前方,第一打捞板和第二打捞板的往复运动将浮萍送入存储仓。
6.进一步的,所述第一连接臂和第二连接臂分别固定于船体两侧,第一打捞板一端与第一连接臂铰接,第二打捞板一端与第二连接臂铰接,当第一打捞板和第二打捞板将浮萍送入存储仓时,第一打捞板和第二打捞板同时向内转动。
7.进一步的,所述容纳仓底面设置存储仓挡板,存储仓挡板一端通过电动伸缩杆与船体连接,电动伸缩杆伸长时,存储仓挡板覆盖整个存储仓顶部。
8.进一步的,所述电动伸缩杆伸长时,第一打捞板和第二打捞板向外转动,电动伸缩杆缩短时,第一打捞板和第二打捞板向内转动。
9.进一步的,所述存储仓底部设置浮萍倾倒门,存储仓中的浮萍从打开的浮萍倾倒门倒出。
10.进一步的,所述第一打捞板和第二打捞板上均设置有过滤孔。
11.进一步的,所述驱动装置包括在陆地上驱动船体运动的水陆两栖轮胎和在水中驱动船体运动的螺旋桨。
12.进一步的,所述驱动装置包括船体舵机,船体舵机固定于船体后端,螺旋桨通过主
轴与船体舵机的输出端连接。
13.进一步的,所述船体上方固定设置有图像摄取装置,所述图像摄取装置用于摄取水面浮萍分布情况。
14.有益效果:本实用新型相对于现有技术,其优点是驱动船体在水上运动,通过打捞板的往复运动进行自动化打捞浮萍,更加精准快捷地打捞浮萍,不仅降低了打捞浮萍工人的劳动强度,而且也使打捞效率和质量得到提高,且该装置结构简单,容易大批量生产制造,具有很大的研究及应用价值。该装置适用于湖泊、水库、大型灌溉渠中的各种浮萍的打捞,应用范围较为广泛。
附图说明
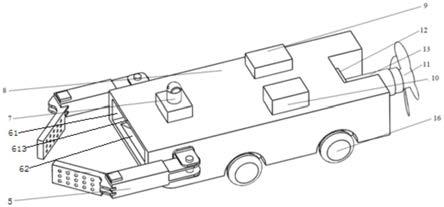
15.图1是本实用新型打捞装置的整体结构示意图;
16.图2是本实用新型打捞装置的仰视图;
17.图3是本实用新型打捞装置存储仓部分的结构示意图;
18.图4是本实用新型螺旋桨驱动的结构剖视图;
19.图5是本实用新型舵机驱动打捞板的剖视图。
具体实施方式
20.如图1所示,本实施例中一种浮萍打捞装置,包括船体8、驱动船体8运动的驱动装置、打捞臂5和存储仓,船体8采用铝合金材料,可以减少使用过程中的磨损,延长船体8的使用寿命,轻质耐用,并且增加了整体装置的稳定性。船体8前端开口,内部设置容纳仓61,容纳仓61包括第一侧壁611、第二侧壁612、顶壁613和底面614,容纳仓61底面向下凹陷形成存储仓62,存储仓62用于存储打捞的浮萍,存储仓62仓顶与船体8前端开口的底边平齐,如图3所示,容纳仓61底面设置存储仓挡板17,通过存储仓挡板17的移动实现存储仓62的开放与封闭,存储仓挡板17一端通过电动伸缩杆18与船体8连接,电动伸缩杆18一端固定在船体内部,另一端与存储仓挡板17固定连接,且电动伸缩杆18延伸方向平行于船体8运行的方向,电动伸缩杆18伸长时,存储仓挡板17移动到存储仓62的顶部,且完全覆盖存储仓62仓顶,将存储仓62封闭,电动伸缩杆18收缩时,存储仓挡板17从存储仓62顶部移开,存储仓62打开允许浮萍进入。在打捞臂往存储仓62送浮萍时,电动伸缩杆18收缩,浮萍进入存储仓,当打捞臂往远离存储仓62方向移动时,电动伸缩杆18伸长,存储仓62关闭,有效减少存储仓内进水。如图2所示,存储仓62底部设置浮萍倾倒门19,存储仓中的浮萍从打开的浮萍倾倒门19倒出,浮萍倾倒门19一端与船体铰接,另一端通过开关20实现打开或关闭。
21.打捞臂包括第一打捞臂和第二打捞臂,第一打捞臂和第二打捞臂分别固定于船体8两侧,第一打捞臂包括第一打捞板101、第一舵机201和第一连接臂401,第一连接臂401一端与船体8固定连接,第一连接臂401另一端通过第一舵机201与第一打捞板101铰接,第一连接臂401延伸方向平行于船体8运动的方向,第一舵机201固定设置于第一连接臂401上,如图5所示,第一舵机201的输出端通过联轴器3和转轴4与第一打捞板101一端连接,第一舵机201带动第一打捞板101相对第一连接臂转动,且第一打捞板101所在平面垂直于水平面,第一舵机201带动第一打捞板101相对于船体8前端开口往复运动,第二打捞臂包括第二打捞板102、第二舵机202和第二连接臂402,第二连接臂402一端与船体8固定连接,第二连接
臂402另一端通过第二舵机202与第二打捞板102铰接,第二连接臂402延伸方向平行于第一连接臂401的延伸方向,第二舵机202固定设置于第二连接臂402上,第二舵机202的输出端通过联轴器3和转轴4与第二打捞板102一端连接,第二舵机202带动第二打捞板102相对第二连接臂转动,且第二打捞板102所在平面垂直于水平面,第二舵机202带动第二打捞板102相对于船体8前端开口往复运动,第一打捞板101和第二打捞板102位于船体8前端开口的前方,且面对面设置,在将浮萍送入存储仓62时,第一打捞板101和第二打捞板102同时存在靠近存储仓62的运动趋势,向内转动,且第一打捞板101和第二打捞板102的运动频率相同,第一打捞板101和第二打捞板102的往复运动将浮萍送入存储仓。电动伸缩杆18的收缩与第一打捞板101和第二打捞板102往复运动的频率相同,当第一打捞板101和第二打捞板102远离存储仓62时,电动伸缩杆18伸长,当第一打捞板101和第二打捞板102靠近存储仓62时,电动伸缩杆18收缩。
22.第一打捞板101和第二打捞板102上均设置有过滤孔,过滤孔减小打捞时第一打捞板101和第二打捞板102的遇水阻力,同时第一打捞板101和第二打捞板102上还可以装有过滤网,在调节过滤孔大小以调节遇水阻力时,保证浮萍的有效打捞。
23.驱动装置包括在陆地上驱动船体运动的水陆两栖轮胎16、在水中驱动船体运动的螺旋桨11和船体舵机12,船体舵机12固定在船体8尾端,如图4所示,船体舵机12的输出轴与主轴13固定连接,主轴13内部固定连接有螺旋桨电机14,螺旋桨电机14的输出端通过转轴联轴器15与螺旋桨11固定连接,船体舵机12控制主轴13左右摆动,从而实现船体8的转向。水陆两栖轮胎16为带气囊的水陆两用轮胎,在水中气囊充气,为船体8提供浮力,在陆地上,气囊放气,便于陆地上行使。水陆两栖轮胎16在水中打捞浮萍时为船体8提供浮力,完成打捞工作行驶到路边。
24.船体8上方固定设置有图像摄取装置7,图像摄取装置7通过粘接形式固定在船体8上方,图像摄取装置7摄取水面浮萍情况,并将影像数据传输到计算机端,便于操作人员观测环境中浮萍的分布情况,针对性控制船体运行,提高浮萍打捞效率。
25.船体8上方还固定有电源9和信息传输与控制装置10,电源9通过粘接固定在船体8上部,采用7.4v2200mah锂电池,提高倍率性能,其通过电缆与第一舵机201、第二舵机202、图像摄取装置7、信息传输与控制装置10、船体舵机12、螺旋桨电机14和电动伸缩杆18连接,为整个装置提供电力。信息传输与控制装置10通过粘接固定在船体8上部,其通过无线信号传输形式与计算机端之间传输信号,用于控制第一舵机201和第二舵机202、船体舵机12的运动,控制螺旋桨电机14的启停和电动伸缩杆18的伸缩,以及获取图像摄取装置7摄取的影像数据,并传输到计算机端。
26.上述浮萍打捞装置的工作过程如下:
27.首先将打捞装置放置到指定位置处,使得图像摄取装置7对准打捞处的环境,然后接通电源3,打开计算机。螺旋桨11带动打捞装置在水中运动且图像摄取装置7开始工作,操作人员在岸边控制浮萍打捞装置,并通过图像摄取装置7传回的影像观测浮萍分布情况,通过船体舵机12实现船体转向,控制船体8到达浮萍密集生长区域。当船体8到达后,操作人员在计算机端通过无线信号向信息传输与控制装置10发送指令,控制打捞臂和电动伸缩杆18工作,第一打捞板101和第二打捞板102在水平面内实现往复式运动,实现打捞浮萍的作用,打捞的浮萍存储在存储仓内,存储仓62满后控制船体返回岸边,旋转浮萍倾倒门开关20,打
开浮萍倾倒门19将储存仓6内的浮萍倒出,还需要打捞时再将装置放回水面工作,打捞工作完毕则关闭电源,放回规定位置处。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1