作业机械的制作方法
1.本发明涉及液压挖掘机等作业机械。
背景技术:
2.液压挖掘机等作业机械通常通过将从液压泵供给的液压油经由阀向液压执行机构输送而驱动执行机构,从而进行工作。此时,向执行机构输送的工作油的流量根据与基于操作装置产生的操作指示量相应的阀开口量而被控制,可以说阀的流量控制性能决定了执行机构的控制精度。因此,对于阀谋求高流量控制性及稳定发挥该性能的高鲁棒性。
3.但是,在各种环境下运转的作业机械中,车身的周围温度和工作油的温度根据运转地域和运转状态而大幅不同或发生变化的情况不少。由于工作油会根据温度而粘性等特性发生变化,所以控制工作油的阀的性能也会发生变化。因此,需要相对于油温的变化确保阀性能的鲁棒性的技术。
4.因此,作为解决这样的课题的技术之一而提出了专利文献1所示的技术。根据专利文献1所记载的面向先导工作式电气液压阀的位置控制装置,流量控制阀的控制器具备包含阀柱的位置控制机构、速度转换机构及动态偏移机构的控制装置,构成为控制装置执行试验处理,且基于在试验处理中获取到的数据对根据温度发生变化的工作油的粘度进行补充。根据这样的结构,通过根据工作油温变更阀控制特性,而能够减小阀的流量控制性能相对于油温变化的变化。
5.但是,在作业机械中,由于通常是通过设置于工作油箱的温度传感器获取油温,所以在温度传感器的输出值与控制对象的阀周边的温度或从节流部通过的工作油的温度之间会产生偏离,其结果为,无法通过控制器完全修正阀控制特性,有无法维持阀的流量控制性能的隐忧。
6.作为解决这样的课题的技术之一而提出了专利文献2所示的技术。在专利文献2所记载的工程机械中,温度传感器设于阀壳体,通过该结构而能够检测阀壳体的温度。
7.现有技术文献
8.专利文献
9.专利文献1:日本特表2014-534381号公报
10.专利文献2:日本特开2014-126176号公报
技术实现要素:
11.在专利文献2的作业机械中,由于温度传感器和工作油没有直接接触而计测温度,所以有可能会由于温度传感器的设置位置与阀的节流部之间的距离或从壳体向大气的散热量而在计测温度与工作油温度之间产生大的偏离。另外,在与壳体温度具有温度差的工作油突然流来的情况下,无法立刻跟上该温度变化,而有可能无法测定准确的油温。因此,无法进行适于控制对象的阀周边的温度或从节流部通过的工作油的温度的阀控制特性的修正,其结果为阀的流量控制性能降低,有招致执行机构控制精度降低的隐患。
12.本发明是鉴于上述课题而做出的,其目的在于提供一种无论从控制向执行机构供给的供给流量的流量控制装置通过的工作油的温度变动如何均能够维持执行机构的控制精度的作业机械。
13.为了实现上述目的,本发明提供一种作业机械,具备:车身;作业装置,其安装于上述车身;执行机构,其驱动上述车身或上述作业装置;液压泵;流量控制装置,其并联地连接于上述液压泵的排出管线,对从上述液压泵向上述执行机构供给的液压油的流动进行调整;操作杆,其用于对上述执行机构的动作进行指示;先导泵;电磁比例减压阀,其将从上述先导泵供给的液压油减压且将作为上述流量控制装置的操作压而输出;和控制器,其根据来自上述操作杆的动作指示量向上述电磁比例减压阀输出指令电气信号,在上述作业机械中,上述流量控制装置具有:阀芯,其配置于将上述排出管线和上述执行机构中的一个执行机构连接的主油路,根据来自上述电磁比例减压阀的操作压而移动;取样油路,其从上述主油路分支出;以及温度传感器,其设置于上述取样油路,上述控制器根据来自上述温度传感器的信号修正上述指令电气信号。
14.根据以上那样构成的本发明,通过计测从控制向执行机构供给的供给流量的流量控制装置通过的工作油的温度且根据其计测值修正针对流量控制装置的指令电气信号,而能够使向执行机构供给的供给流量更接近目标流量。由此,无论从流量控制装置通过的工作油的温度变动如何,均能够维持执行机构的控制精度。
15.发明效果
16.根据本发明的作业机械,无论从控制向执行机构供给的供给流量的流量控制装置通过的工作油的温度变动如何,均能够维持执行机构的控制精度。
附图说明
17.图1是本发明的实施方式的液压挖掘机的侧视图。
18.图2a是本发明的第1实施例中的液压驱动装置的回路图(1/2)。
19.图2b是本发明的第1实施例中的液压驱动装置的回路图(2/2)。
20.图3是本发明的第1实施例中的控制器的功能框图。
21.图4是表示本发明的第1实施例中的辅助流量控制阀的开口-指令电气信号映射的图。
22.图5是表示本发明的第1实施例中的控制器的运算处理的流程图。
23.图6是本发明的第1实施例中的辅助流量控制装置的剖视图。
24.图7是本发明的第1实施例中的温度传感器的设置方法的变形例1。
25.图8是本发明的第1实施例中的温度传感器的设置方法的变形例2。
26.图9是本发明的第1实施例中的温度传感器的设置方法的变形例3。
27.图10是本发明的第1实施例中的温度传感器的变形例1。
28.图11是本发明的第1实施例中的温度传感器的变形例2。
29.图12a是本发明的第2实施例中的液压驱动装置的回路图(1/2)。
30.图12b是本发明的第2实施例中的液压驱动装置的回路图(1/2)。
31.图13是表示本发明的第2实施例中的控制器的运算处理的流程图。
32.图14是本发明的第2实施例中的方向控制阀及单向阀的剖视图。
具体实施方式
33.以下,作为本发明的实施方式的作业机械而列举液压挖掘机为例,参照附图进行说明。此外,在各图中,对于同等的部件标注相同的附图标记,并适当省略重复的说明。
34.图1是本实施方式的液压挖掘机的侧视图。
35.如图1所示,液压挖掘机300具备:行驶体201;能够旋转地配置在行驶体201上、且构成车身的旋转体202;和能够沿上下方向转动地安装于旋转体202、且进行砂土的挖掘作业等的作业装置203。旋转体202通过旋转马达211而被驱动。
36.作业装置203包含能够沿上下方向转动地安装于旋转体202的动臂204、能够沿上下方向转动地安装于动臂204的前端的斗杆205、和能够沿上下方向转动地安装于斗杆205的前端的铲斗206。动臂204由动臂缸204a驱动,斗杆205由斗杆缸205a驱动,铲斗206由铲斗缸206a驱动。
37.在旋转体202上的前侧位置设有驾驶室207,在后侧位置设有确保重量平衡的配重209。在驾驶室207与配重209之间设有收纳发动机及液压泵等的机械室208,在机械室208中设置有控制阀210。
38.在本实施方式的液压挖掘机300中搭载有以下各实施例中说明的液压驱动装置。
39.实施例1
40.图2a及图2b是本发明的第1实施例中的液压驱动装置的回路图。
41.(1)结构
42.第1实施例中的液压驱动装置400具备通过未图示的发动机而被驱动的三个主液压泵、例如分别由可变容量形液压泵构成的第1液压泵1、第2液压泵2及第3液压泵3。另外,具备通过未图示的发动机而被驱动的先导泵4,并且具备向第1~第3液压泵1~3及先导泵4供给油的工作油箱5。
43.第1液压泵1的倾转角由附设于第1液压泵1的调节器控制。第1液压泵1的调节器包含流量控制指令压端口1a、第1液压泵自压端口1b及第2液压泵自压端口1c。第2液压泵2的倾转角由附设于第2液压泵2的调节器控制。第2液压泵2的调节器包含流量控制指令压端口2a、第2液压泵自压端口2b及第1液压泵自压端口2c。第3液压泵3的倾转角由附设于第3液压泵3的调节器控制。第3液压泵3的调节器包含流量控制指令压端口3a及第3液压泵自压端口3b。
44.第1液压泵1的排出管线40经由中间旁通管线41与工作油箱5连接。在中间旁通管线41,从上游侧起按顺序配置有对驱动行驶体201的一对行驶马达中的未图示的右行驶马达的驱动进行控制的右行驶用方向控制阀6、对向铲斗缸206a供给的液压油的流动进行控制的铲斗用方向控制阀7、对向斗杆缸205a供给的液压油的流动进行控制的第2斗杆用方向控制阀8、以及对向动臂缸204a供给的液压油的流动进行控制的第1动臂用方向控制阀9。铲斗用方向控制阀7、第2斗杆用方向控制阀8及第1动臂用方向控制阀9的各供给端口分别经由油路42、43、油路44、45及油路46、47而并联地连接于将右行驶用方向控制阀6和铲斗用方向控制阀7连接的中间旁通管线41的一部分。油路42、43、油路44、45及油路46、47分别构成将第1液压泵2的排出管线40和各执行机构连接的主油路。
45.第2液压泵2的排出管线50经由中间旁通管线51与工作油箱5连接,并且经由合流阀17与第1液压泵1的排出管线40连接。在中间旁通管线51,从上游侧起按顺序配置有对向
动臂缸204a供给的液压油的流动进行控制的第2动臂用方向控制阀10、对向斗杆缸205a供给的液压油的流动进行控制的第1斗杆用方向控制阀11、对向驱动例如取代铲斗206而设置的破碎机等第1特殊附属工具的未图示的第1执行机构供给的液压油的流动进行控制的第1附属工具用方向控制阀12、以及对驱动行驶体201的一对行驶马达中的未图示的左行驶马达的驱动进行控制的左行驶用方向控制阀13。第2动臂用方向控制阀10、第1斗杆用方向控制阀11、第1附属工具用方向控制阀12以及左行驶用方向控制阀13的各供给端口分别经由油路52、53、油路54、55、油路56、57及油路58并联地连接于第2液压泵2的排出管线50。油路52、53、油路54、55、油路56、57及油路58分别构成将第2液压泵2的排出管线50和各执行机构连接的主油路。
46.第3液压泵3的排出管线60经由中间旁通管线61与工作油箱5连接。在中间旁通管线61,从上游侧起按顺序配置有对向驱动旋转体202的旋转马达211供给的液压油的流动进行控制的旋转用方向控制阀14、对向动臂缸204a供给的液压油的流动进行控制的第3动臂用方向控制阀15、以及第2附属工具用方向控制阀16。第2附属工具用方向控制阀16用于在第1特殊附属工具的基础上安装了具备第2执行机构的第2特殊附属工具时,或者在安装了取代第1特殊执行机构而具备第1执行机构和第2执行机构这两个执行机构的第2特殊附属工具时,对向第2执行机构供给的液压油的流动进行控制。旋转用方向控制阀14、第3动臂用方向控制阀15及第2附属工具用方向控制阀16的各供给端口分别经由油路62、63、油路64、65及油路66、67而并联地连接于第3液压泵3的排出管线60。油路62、63、油路64、65及油路66、67分别构成将第3液压泵3的排出管线60和各执行机构连接的主油路。
47.在动臂缸204a、斗杆缸205a及铲斗缸206a,以获取液压挖掘机300的动作状态为目的,分别设有检测行程量的行程传感器94、95、96。此外,获取液压挖掘机300的动作状态的机构为多种多样的,例如倾斜传感器、旋转角传感器、imu等,并不限于上述的行程传感器。
48.在与铲斗用方向控制阀7连接的油路42、43、与第2斗杆用方向控制阀8连接的油路44、45以及与第1动臂用方向控制阀9连接的油路46、47上,分别设有对在复合操作时从第1液压泵1向各方向控制阀供给的液压油的流量进行限制的辅助流量控制装置21、22、23。
49.在与第2动臂用方向控制阀10的供给端口连接的油路52、53、与第1斗杆用方向控制阀11的供给端口连接的油路54、55以及与第1附属工具用方向控制阀12的供给端口连接的油路56、57上,分别设有对在复合操作时从第2液压泵2向各方向控制阀供给的液压油的流量进行限制的辅助流量控制装置24、25、26。
50.在与旋转用方向控制阀14的供给端口连接的油路62、63、与第3动臂用方向控制阀15的供给端口连接的油路64、65以及与第2附属工具用方向控制阀16的供给端口连接的油路66、67上,分别设有对在复合操作时从第3液压泵3向各方向控制阀供给的液压油的流量进行限制的辅助流量控制装置27、28、29。
51.先导泵4的排出端口经由先导一次压生成用的先导溢流阀18与工作油箱5连接,并且经由油路71与电磁阀单元83连接。电磁阀单元83内置有电磁比例减压阀83a、83b、83c、83d、83e。电磁比例减压阀83a~83e的一方的输入端口与油路71连接,另一方的输入端口与工作油箱5连接。电磁比例减压阀83a的输出端口与第2液压泵2的调节器的流量控制指令压端口2a连接,电磁比例减压阀83b、83c的输出端口与第2动臂用方向控制阀10的先导端口连接,电磁比例减压阀83d、83e的输出端口与第1斗杆用方向控制阀11的先导端口连接。电磁
比例减压阀83a~83e分别根据来自控制器82的指令电气信号将先导一次压减压,并作为先导指令压输出。
52.此外,为了简化说明,对于第1液压泵1及第3液压泵3的调节器的流量控制指令压端口1a、3a用的电磁比例减压阀、右行驶用方向控制阀6用的电磁比例减压阀、铲斗用方向控制阀7用的电磁比例减压阀、第2斗杆用方向控制阀8用的电磁比例减压阀、第1动臂用方向控制阀9用的电磁比例减压阀、第1附属工具用方向控制阀12用的电磁比例减压阀、左行驶用方向控制阀13用的电磁比例减压阀、旋转用方向控制阀14用的电磁比例减压阀、第3动臂用方向控制阀15用的电磁比例减压阀、以及第2附属工具用方向控制阀16用的电磁比例减压阀,省略了图示。
53.辅助流量控制装置24由形成辅助可变节流部的提升型的主阀31、设于主阀31的阀芯31a且根据阀芯31a的移动量使开口面积变化的控制可变节流部31b、和先导可变节流阀32构成。内置主阀31的壳体具有:形成于主阀31与油路52的连接部的第1压力室31c;形成于主阀31与油路53的连接部的第2压力室31d;和以经由控制可变节流部31b与第1压力室31c连通的方式形成的第3压力室31e。第3压力室31e和先导可变节流阀32通过油路68a连接,先导可变节流阀32和第2压力室31d通过油路68b连接,油路68a、68b形成先导管线68。在先导管线68上设有检测在先导管线68中流动的工作油的温度(油温)的温度传感器97。第1压力室31c构成主油路52的一部分,第2压力室31d构成主油路53的一部分。先导管线68构成用于提取从阀芯31a通过的工作油的一部分的油路(以下称为取样油路)。本实施例中的取样油路68从主油路52、53中的将阀芯31a和第1斗杆用方向控制阀11连接的油路部分(油路53)分支出,但也可以从将第2液压泵2的排出管线50和阀芯31a连接的油路部分(油路52)分支出。
54.先导可变节流阀32的先导端口32a与电磁比例减压阀35的输出端口连接。电磁比例减压阀35的供给端口与先导泵4的排出端口连接,油箱端口与工作油箱5连接。
55.在第2液压泵2的排出管线50上设有压力传感器91,在将第2动臂用方向控制阀10和辅助流量控制装置24连接的油路53上设有压力传感器92。
56.此外,为了简化说明而省略了一部分图示,但辅助流量控制装置21~29及周边的设备、配管、布线均为相同的结构。
57.液压驱动装置400具备:能够对第1动臂用方向控制阀9、第2动臂用方向控制阀10以及第3动臂用方向控制阀15进行切换操作的操作杆81a、和能够对第1斗杆用方向控制阀11及第2斗杆用方向控制阀8进行切换操作的操作杆81b。此外,为了简化说明,对于对右行驶用方向控制阀6进行切换操作的右行驶用操作杆、对铲斗用方向控制阀7进行切换操作的铲斗用操作杆、对第1附属工具用方向控制阀12进行切换操作的第1附属工具用操作杆、对左行驶用方向控制阀13进行切换操作的左行驶用操作杆、对旋转用方向控制阀14进行切换操作的旋转用操作杆、对第2附属工具用方向控制阀16进行切换操作的第2附属工具用操作杆,省略了图示。
58.液压驱动装置400具备控制器82,操作杆81a、81b的输出值、压力传感器91~93的输出值、行程传感器94~96的输出值及温度传感器97、98的输出值被向控制器82输入。另外,控制器82向电磁阀单元83所具备的各电磁比例减压阀、和电磁比例减压阀35、36(及未图示的电磁比例减压阀)输出指令电气信号。
59.图3是控制器82的功能框图。在图3中,控制器82具有输入部82a、车身姿势运算部
82b、要求流量运算部82c、映射选择部82d、目标流量运算部82e、指令电气信号运算部82f和输出部82g。
60.输入部82a获取操作杆输入量及各传感器的输出值。车身姿势运算部82b基于传感器输出值运算车身202及作业装置203的姿势。要求流量运算部82c基于操作杆输入量运算执行机构的要求流量。映射选择部82d基于温度传感器输出值(油温)选择在指令电气信号的计算中使用的开口-指令电气信号映射。
61.图4是表示辅助流量控制装置24的开口-指令电气信号映射的图,示出了主阀31的开口面积与电磁比例减压阀35的指令电气信号的相关性。在图4中,温度t1、t2、t3具有t1<t2<t3的关系,即使在将主阀31的开口面积调整为相同的情况下,也需要随着油温降低而增大指令电气信号。
62.返回到图3,目标流量运算部82e基于车身202及作业装置203的姿势和执行机构的要求流量运算执行机构的目标流量。指令电气信号运算部82f基于来自目标流量运算部82e的目标流量、来自映射选择部82d的开口-指令电气信号映射和来自输入部82a的压力传感器输出值运算指令电气信号。输出部82g基于来自指令电气信号运算部82f的结果生成指令电气信号,并将该信号向各电磁比例减压阀输出。
63.图5是表示第1实施例中的控制器82的运算处理的流程图。图5所示的运算处理是关于所有的方向控制阀而执行的,但以下仅说明与第2动臂用方向控制阀10相关的部分。
64.控制器82首先判断是否没有操作杆81a的输入(步骤s101)。在步骤s101中判断成没有操作杆81a的输入(是)的情况下,结束该流程。
65.在步骤s101中判断成有操作杆81a的输入(否)的情况下,由电磁阀单元83的电磁比例减压阀83b、83c生成与操作杆输入量相应的先导指令压pi_ms(pibm2u、pibm2d)(步骤s102),并根据先导指令压pi_ms使方向控制阀10开口(步骤s103)。
66.继步骤s103之后,由控制器82的目标流量运算部82e计算出执行机构的目标流量(步骤s104),并由控制器82的映射选择部82d选择与油温相应的开口-指令电气信号映射(步骤s105),由控制器82的指令电气信号运算部82f基于目标流量和压力传感器输出值计算出主阀31的目标开口面积(步骤s106),并基于目标开口面积和开口-指令电气信号映射计算出目标指令电气信号(步骤s107),由控制器82的输出部82g向电磁比例减压阀35输出指令电气信号(步骤s108)。
67.继步骤s108之后,电磁比例减压阀35接收从控制器82输出的指令电气信号而生成先导指令压pi_fcv(步骤s109),根据来自电磁比例减压阀35的指令压pi_fcv使先导可变节流阀32的先导阀柱112位移(步骤s110),根据先导可变节流阀32的开口量使辅助流量控制装置24的主阀31开口(步骤s111),由辅助流量控制装置24控制向执行机构供给的供给流量(步骤s112),结束该流程。
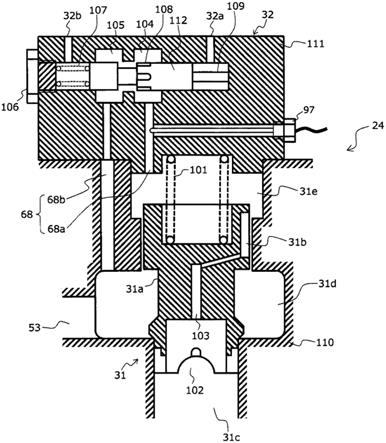
68.图6是第1实施例中的辅助流量控制装置24的剖视图。此外,其他的辅助流量控制装置也为与之相同的结构。
69.提升型的主阀31的阀芯31a滑动自如地设置于主壳体110。位于阀芯31a的上游侧的第1压力室31c和位于下游侧的第2压力室31d经由形成在主壳体110与阀芯31a之间的辅助可变节流部而连通。该辅助可变节流部的开口特性根据形成于阀芯31a的缺口102的形状确定。阀芯31a通过设置于第3压力室31e的弹簧101而落座在将第1压力室31c和第2压力室
31d连通的开口部。第1压力室31c和第3压力室31e经由形成于阀芯31a内部的油路103而连通。在油路103的第3压力室31e侧出口与主壳体110之间形成有控制可变节流部31b。
70.与设置有阀芯31a的主壳体110的端部相平齐地安装有先导可变节流阀32。先导可变节流阀32由先导壳体111、先导阀柱112、弹簧107及插塞106构成。弹簧107设置于先导阀柱112的一端侧,将先导阀柱112向另一端侧按压。在先导阀柱112的另一端侧,设有通过与先导壳体111接触而保持先导阀柱112的位置的杆109。
71.在先导阀柱112与先导壳体111之间形成有油室104和油室105。油室104和油室105通过形成在先导阀柱112与先导壳体111之间的节流部而连通。该节流部的开口特性根据形成于先导阀柱112的缺口108的形状确定。油室104和第3压力室31e经由油路68a连通,油室105和第2压力室31d经由油路68b连通。
72.此外,对于缺口102、控制可变节流部31b及缺口108,为了得到设计者所期望的开口特性,除了图示的形状以外,也使用各种形状及它们的组合。
73.在先导壳体111上设有检测在油路68a中流动的工作油的温度的温度传感器97。此外,温度传感器97的配置并不限于图6所示的配置,也可以如图7所示那样配置于油路68b,或如图8所示那样配置于油室105,或如图9所示那样配置于油室104。另外,温度传感器97并不限于如图6~图9所示那样直接暴露于工作油的形态,也可以如图10或图11所示那样,将由热导率高的材料制成的插塞151暴露于在油路68a中流动的工作油,并通过非接触式的温度传感器97(图10所示)或埋入式的温度传感器97(图11所示)检测插塞151的温度。由于本实施例中的取样油路68由先导管线68(油路68a、68b)构成,所以设于先导壳体111。
74.(2)动作
75.在这样构成的第1实施例中的液压驱动装置400中,能够进行以下所述那样的操作及控制。此外,在此为了简单地进行说明,而说明在相对于第2液压泵2并联地配置的第2动臂用方向控制阀10和第1斗杆用方向控制阀11中需要分流的情况下的动作。
76.控制器82基于从操作杆81a、81b输入的杆操作量和从各行程传感器94~96获取到的车身动作状态运算执行机构204a、205a的目标流量,同时根据从温度传感器97、98获取到的工作油温选择辅助流量控制装置24、25的开口-指令电气信号映射。
77.接着,控制器82基于执行机构204a、205a的各目标流量和由压力传感器91~93获取到的主阀31、33的各前后差压,使用以下的算式计算出主阀31、33的各目标开口面积。
78.【式1】
79.aref=qref/k√
⊿
p
···
(1)
80.※
k是根据流动场所确定的系数
81.※
aref是目标开口面积
82.※
qref是目标流量
83.※⊿
p是主阀的前后差压
84.接着,参照开口-指令电气信号映射,计算出与目标开口面积aref相对应的指令电气信号,并将该信号向电磁比例减压阀35、36输出。电磁比例减压阀35、36根据来自控制器82的指令电气指令生成先导指令压pi_fcv,并使其向先导可变节流阀32、34的先导端口32a、34a作用。
85.先导可变节流阀32、34通过根据先导指令压pi_fcv使先导阀柱112位移,而使开
口面积aps发生变化。当先导可变节流阀32、34的开口面积aps发生变化时,与之相应地控制可变节流部31b、33b的开口面积afb也会发生变化。此时,控制可变节流部31b、33b的开口面积afb与先导可变节流阀32、34的开口面积aps的关系如下述那样。
86.【式2】
87.afb=l
×
aps
···
(2)
88.※
l是根据主阀的形状确定的系数
89.由于控制可变节流部31b、33b的开口面积afb与主阀31、33的位移相应地发生变化,所以当先导可变节流阀32、34的开口面积aps发生变化时阀芯31a、33a会位移,控制可变节流部31b、33b的开口面积afb与先导可变节流阀32、34的开口面积aps的比率被保持为固定。此时,由于主阀31、33的开口面积amp也与阀芯31a、33a的位移相应地发生变化,所以主阀31、33的开口面积amp与先导指令压pi_fcv相应地发生变化。
90.以上,说明了辅助流量控制装置24、25的动作,但其他辅助流量控制装置的动作也是同样的。
91.(3)效果
92.在本实施例中,提供一种作业机械300,具备:车身202;作业装置203,其安装于车身202;执行机构204a、205a、206a、211,其驱动车身202或作业装置203;液压泵1~3;流量控制装置21~29,其并联地连接于液压泵1~3的排出管线40、50、60,且对从液压泵1~3向执行机构204a、205a、206a、211供给的液压油的流动进行调整;操作杆81a、81b,其用于对执行机构204a、205a、206a、211的动作进行指示;先导泵4;电磁比例减压阀35、36,其将从先导泵4供给的液压油减压且作为流量控制装置24、25的操作压而输出;和控制器82,其根据来自操作杆81a、81b的动作指示量向电磁比例减压阀35、36输出指令电气信号,在上述作业机械300中,流量控制装置24具有:阀芯31a,其配置于将排出管线50和执行机构204a、205a中的一个执行机构连接的主油路52、53,根据来自电磁比例减压阀35的操作压而移动;取样油路68,其从主油路52、53分支出;以及温度传感器97,其设置于取样油路68,控制器82根据来自温度传感器97的信号修正上述指令电气信号。
93.另外,在本实施例中,作为流量控制装置的辅助流量控制装置24具有:作为阀芯的提升型阀芯31a,其配置于将液压泵2的排出管线50和执行机构205a连接的主油路52、53,根据来自电磁比例减压阀35的操作压而移动;主壳体110,其收纳提升型阀芯31a;先导壳体111,其将提升型阀芯31a封入于主壳体110;油室31e,其形成在提升型阀芯31a与先导壳体111之间;先导管线68,其将提升型阀芯31a的下游侧和油室31e连接且根据通过流量决定提升型阀芯31a的移动量;和先导可变节流阀32,其配置于先导管线68,根据来自电磁比例减压阀35的操作压使开口面积变化,在提升型阀芯31a上形成有控制可变节流部31b,该控制可变节流部31b将主油路52、53中的连接液压泵2与提升型阀芯31a的油路部分52和油室31e连接,并根据提升型阀芯31a的移动量使开口面积变化,取样油路68由先导管线68构成。
94.根据以上那样构成的第1实施例,通过对从控制向执行机构204a、205a、206a、211供给的供给流量的流量控制装置21~29通过的工作油的温度进行计测,并根据其计测值修正针对流量控制装置21~29的指令电气信号,能够使向执行机构204a、205a、206a、211供给的供给流量更接近目标流量。由此,无论从流量控制装置21~29通过的工作油的温度变动如何,均能够维持执行机构204a、205a、206a、211的控制精度。
95.另外,由于与供向执行机构204a供给的工作油流动的油路相比在先导管线68中流动的工作油的流量少,所以流体向温度传感器97施加的负荷少,能够降低温度传感器97的故障风险。而且,通过在与主壳体110分体地构成的先导壳体111设置温度传感器97,能够在温度传感器97发生了故障的情况下容易更换温度传感器97。
96.实施例2
97.关于本发明的第2实施例,以与第1实施例的不同点为中心进行说明。
98.(1)结构
99.本发明的第1实施例的应用中的液压驱动装置的结构与第1实施例中的液压驱动装置400(图2a及图2b所示)几乎相同,但在以下方面不同。
100.在第1实施例中,在所有的辅助流量控制装置1~29设有温度传感器,但由于从与相同的排出管线连接的各辅助流量控制装置通过的工作油的温度是相同程度,所以从一个辅助流量控制装置通过的工作油的温度能够以从其他辅助流量控制装置通过的工作油的温度近似得到。因此,在第2实施例中,在与第1液压泵1的排出管线40连接的辅助流量控制装置21~23中的某一个辅助流量控制装置、与第2液压泵2的排出管线50连接的辅助流量控制装置24~26中的某一个辅助流量控制装置、以及与第3液压泵3的排出管线60连接的辅助流量控制装置27~29中的某一个辅助流量控制装置上设置温度传感器,在其他辅助流量控制装置上不设置温度传感器。
101.(2)动作
102.本发明的第1实施例的应用中的液压驱动装置的动作与第1实施例中的液压驱动装置400(图2a及图2b所示)几乎相同,但在以下方面不同。
103.控制器82在对没有设置温度传感器的辅助流量控制装置进行控制时,使用连接于与控制对象的辅助流量控制装置相同的排出管线的其他辅助流量控制装置的温度传感器的输出值进行运算处理。
104.(3)效果
105.在以上那样构成的第2实施例中,能够得到与第1实施例1相同的效果。另外,由于能够减少设于辅助流量控制装置1~29的温度传感器的数量,所以能够削减液压驱动装置400的制造成本。
106.实施例3
107.图12a及图12b是本发明的第3实施例中的液压驱动装置的回路图。
108.(1)结构
109.第3实施例中的液压驱动装置的结构与第1实施例中的液压驱动装置400(图2a及图2b所示)几乎相同,但在以下方面不同。
110.在与铲斗用方向控制阀7连接的油路42、43、与第2斗杆用方向控制阀8连接的油路44、45以及与第1动臂用方向控制阀9连接的油路46、47上,分别设有防止从执行机构侧向泵侧的逆流的单向阀412、413、414。
111.在与第2动臂用方向控制阀10的供给端口连接的油路52、53、与第1斗杆用方向控制阀11的供给端口连接的油路54、55、以及与第1附属工具用方向控制阀12的供给端口连接的油路56、57上,分别设有防止从执行机构侧向泵侧的逆流的单向阀415、416、417。
112.在与旋转用方向控制阀14的供给端口连接的油路62、63、与第3动臂用方向控制阀
15的供给端口连接的油路64、65、以及与第2附属工具用方向控制阀16的供给端口连接的油路66、67上,分别设有防止从执行机构侧向泵侧的逆流的单向阀418、419、420。
113.单向阀416具有提升型的单向阀芯421。收纳单向阀芯421的壳体具有:形成于单向阀芯421与油路54的连接部的第1油室447;形成于单向阀芯421与油路55的连接部的第2油室443;和以经由形成于单向阀芯421的连通油路441而与第2油室443连通的方式形成的第3油室442。单向阀芯421通过设置于第3油室442的弹簧422而落座于将第1油室447和第2油室443连通的开口部。第3油室442经由连通油路423与第2油室443连通。在连通油路423设有计测工作油的温度(油温)的温度传感器424。
114.在将第2斗杆用方向控制阀11和斗杆缸205a的缸底侧连接的主油路427上设有压力传感器429,在将第2斗杆用方向控制阀11和斗杆缸205a的活塞杆侧连接的主油路428上设有压力传感器430。
115.此外,为了简化说明而省略了一部分图示,但各执行机构、各方向控制阀、单向阀412~420及周边的设备、配管、布线均为相同的结构。
116.图13是表示第3实施例中的控制器82的运算处理的流程图。此外,图13所示的运算处理是关于所有的方向控制阀执行的,但以下仅说明与第1斗杆用方向控制阀11相关的部分。
117.控制器82首先判断是否没有操作杆81b的输入(步骤s201)。在步骤s201中判断成没有操作杆81b的输入(是)的情况下,结束该流程。
118.在步骤s201中判断成有操作杆81b的输入(否)的情况下,由控制器82的目标流量运算部432e计算出执行机构205a的目标流量(步骤s202),由控制器82的映射选择部82d选择与油温相应的开口-指令电气信号映射(步骤s203),由控制器82的指令电气信号运算部82f基于目标流量和压力传感器输出值计算出方向控制阀11的目标开口面积(步骤s204),基于目标开口面积和开口-指令电气信号映射计算出目标指令电气信号(步骤s205),由控制器82的输出部82g向电磁阀单元83的电磁比例减压阀83d、83e输出指令电气信号(步骤s206)。
119.继步骤s206之后,电磁比例减压阀83d、83e接收从控制器82输出的指令电气信号而生成先导指令压pi_ms(piam1u,piam1d)(步骤s207),根据来自电磁比例减压阀83d、83e的先导指令压pi_ms使方向控制阀11开口(步骤s208),通过方向控制阀11控制向执行机构205a供给的供给流量(步骤s209),结束该流程。
120.图14是第3实施例中的第1斗杆用方向控制阀11及单向阀416的剖视图。此外,其他方向控制阀及单向阀也为与之相同的结构。
121.第1斗杆用方向控制阀11具有滑阀阀芯406。滑阀阀芯406根据来自电磁比例减压阀83d、83e的操作压而移动,将主油路55和主油路427(428)连通或切断。
122.提升型的单向阀芯421滑动自如地设置于主壳体444。第1油室447和第2油室443经由形成于主壳体444的单向阀芯开口部而连通。单向阀芯421通过设置于第3油室442的弹簧422而落座于单向阀芯开口部。第2油室443和第3油室442经由设于单向阀芯421内部的连通油路441而连通。
123.在主壳体444上安装有将单向阀芯421封入于主壳体444、且在与单向阀芯421之间形成第3油室442的盖445。第3油室442经由由设于盖445的油路423a和设于主壳体444的油
路423b构成的连通油路423而与第2油室443连通。在盖445上设有对在油路423a中流动的工作油的油温进行计测的温度传感器424。
124.(2)动作
125.本发明的第2实施例中的液压驱动装置的动作与第1实施例中的液压驱动装置400(图2a及图2b所示)几乎相同,但在以下方面不同。
126.控制器82基于从操作杆81b输入的执行机构205a的操作量和从行程传感器94~96获取到的车身动作状态运算执行机构205a的目标流量,同时基于从温度传感器424获取到的工作油温度选择方向控制阀11的开口-指令电气信号映射。
127.接着,控制器82基于执行机构205a的目标流量和由压力传感器91、490、430获取到的方向控制阀11的前后差压,使用以下算式计算出方向控制阀11的目标开口面积。
128.【式3】
129.aref=qref/k√
⊿
p
···
(3)
130.※
k是根据流动场所确定的系数
131.※
aref是目标开口面积
132.※
qref是目标流量
133.※⊿
p是方向控制阀的前后差压
134.接着,参照开口-指令电气信号映射,计算出与目标开口面积aref相对应的指令电气信号,并将该信号向电磁比例减压阀83d、83e输出。电磁比例减压阀83d、83e根据来自控制器82的指令电气指令生成先导指令压pi_ms(piam1u,piam1d),并使其向方向控制阀11的先导端口作用。方向控制阀11相对于先导指令压pi_ms位移而开口。
135.(3)效果
136.在本实施例中,由方向控制阀11和单向阀416构成的流量控制装置具有:作为阀芯的滑阀阀芯406,其配置于将液压泵2的排出管线50和执行机构205a连接的主油路54、55、427、428,根据来自电磁比例减压阀83d、83e的操作压而移动;单向阀芯421,其配置于主油路54、55、427、428中的将液压泵2和滑阀阀芯406连接的油路部分54、55;主壳体444,其收纳滑阀阀芯406及单向阀芯421;盖445,其将单向阀芯421封入于主壳体444;油室442,其形成在单向阀芯421与盖445之间;以及连通油路423,其将单向阀芯421的下游侧和油室442连通,取样油路423由连通油路423构成。
137.根据以上那样构成的第3实施例,通过对从控制向执行机构204a、205a、206a、211供给的供给流量的方向控制阀7~12、14~16通过的工作油的温度进行计测,并根据其计测值修正针对方向控制阀7~12、14~16的指令电气信号,能够使向执行机构204a、205a、206a、211供给的供给流量更接近目标流量。由此,无论从方向控制阀7~12、14~16通过的工作油的温度变动如何,均能够维持执行机构204a、205a、206a、211的控制精度。
138.另外,由于与供向执行机构205a供给的工作油流动的油路相比在连通油路423中流动的工作油的流量少,所以流体向温度传感器98施加的负荷少,能够降低温度传感器98的故障风险。而且,通过在与主壳体444分体地构成的盖445上设置温度传感器98,能够在温度传感器98发生了故障的情况下容易更换温度传感器98。
139.以上,详细叙述了本发明的实施例,但本发明并不限定于上述实施例,包含各种变形例。例如,上述实施例为了易于理解地说明本发明而详细地进行了说明,不必限定于具备
所说明的全部结构。另外,既能够对某个实施例的结构添加其他实施例的结构的一部分,也能够删除某实施例的结构的一部分,或者与其他实施例的一部分进行置换。
140.附图标记说明
[0141]1…
第1液压泵,1a
…
流量控制指令压端口(调节器),1b
…
第1液压泵自压端口(调节器),1c
…
第2液压泵自压端口(调节器),2
…
第2液压泵,2a
…
流量控制指令压端口(调节器),2b
…
第2液压泵自压端口(调节器),2c
…
第1液压泵自压端口(调节器),3
…
第3液压泵,3a
…
流量控制指令压端口(调节器),3b
…
第3液压泵自压端口(调节器),4
…
先导泵,5
…
工作油箱,6
…
右行驶用方向控制阀(流量控制装置),7
…
铲斗用方向控制阀(流量控制装置),8
…
第2斗杆用方向控制阀(流量控制装置),9
…
第1动臂用方向控制阀(流量控制装置),10
…
第2动臂用方向控制阀(流量控制装置),11
…
第1斗杆用方向控制阀(流量控制装置),12
…
第1附属工具用方向控制阀(流量控制装置),13
…
左行驶用方向控制阀(流量控制装置),14
…
旋转用方向控制阀(流量控制装置),15
…
第3动臂用方向控制阀(流量控制装置),16
…
第2附属工具用方向控制阀(流量控制装置),17
…
合流阀,18
…
先导溢流阀,21~29
…
辅助流量控制装置(流量控制装置),31
…
主阀,31a
…
提升型阀芯(阀芯),31b
…
控制可变节流部,31c
…
第1压力室,31d
…
第2压力室,31e
…
第3压力室(油室),32
…
先导可变节流阀,32a
…
先导端口,33
…
主阀,33a
…
提升阀芯(阀芯),33b
…
控制可变节流部,33c
…
第1压力室,33d
…
第2压力室,33e
…
第3压力室(油室),34
…
先导可变节流阀,34a
…
先导端口,35、36
…
电磁比例减压阀,40
…
排出管线,41
…
中间旁通管线,42~47
…
油路(主油路),50
…
排出管线,51
…
中间旁通管线,52~58
…
油路(主油路),60
…
排出管线,61
…
中间旁通管线,62~67
…
油路(主油路),68
…
先导管线(取样油路),68a、68b
…
油路,69
…
先导管线(取样油路),69a、69b
…
油路,71~74
…
油路,81a、81b
…
操作杆,82
…
控制器,82a
…
输入部,82b
…
车身姿势运算部,82c
…
要求流量运算部,82d
…
映射选择部,82e
…
目标流量运算部,82f
…
指令电气信号运算部,82g
…
输出部,83
…
电磁阀单元,83a~83e
…
电磁比例减压阀,91~93
…
压力传感器,94~96
…
行程传感器,97
…
温度传感器,101
…
弹簧,102
…
缺口,103
…
油路,104、105
…
油室,106
…
插塞,107
…
弹簧,108
…
缺口,109
…
杆,110
…
主壳体,111
…
先导壳体,112
…
先导阀柱,151
…
插塞,201
…
行驶体,202
…
旋转体(车身),203
…
作业装置,204
…
动臂,204a
…
动臂缸(执行机构),205
…
斗杆,205a
…
斗杆缸(执行机构),206
…
铲斗,206a
…
铲斗缸(执行机构),207
…
驾驶室,208
…
机械室,209
…
配重,210
…
控制阀,211
…
旋转马达(执行机构),300
…
液压挖掘机(作业机械),400
…
液压驱动装置,406
…
滑阀阀芯(阀芯),412~420
…
单向阀(流量控制装置),421
…
单向阀芯,422
…
弹簧,423
…
连通油路(取样油路),423a、423b
…
油路,424
…
温度传感器,427、428
…
油路(主油路),429、430
…
压力传感器,441
…
连通油路,442
…
第3油室,443
…
第2油室,444
…
主壳体,445
…
盖,447
…
第1油室。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1