一种基于浮式稳桩平台的钢管桩施工系统及工艺的制作方法
1.本发明涉及海上风电领域,具体涉及一种基于浮式稳桩平台的钢管桩施工系统及工艺。
背景技术:
2.现有的风机基础多使用单条浮式起重船与单个稳桩平台配合的方式,但是单项工程一般都涉及稳桩平台定位、钢管桩翻身、钢管桩压锤沉桩、稳桩平台回收等工序,这就导致无法实现流水线作业,工效较低。
3.另外,钢管桩调平一般采用人工经纬仪观测并指挥稳桩平台液压油缸矫正的方式;由于经纬仪无法在浮吊船上架设,故只能架设于稳桩平台上,但在施工过程稳桩平台受震动影响较多,因此在打桩锤开锤期间即要完成经纬仪的架设,在停锤之后再架设经纬仪测量;而且液压油缸的矫正数据均由人工估算,精度差。因此,以上问题亟需解决。
技术实现要素:
4.本发明要解决的技术问题是提供一种基于浮式稳桩平台的钢管桩施工系统及工艺,浮式稳桩平台具备双分体桁架,可以形成流水线作业模式,减少了基础施工中分体桁架定位与回收所用的有效工时,提高了施工效率、节约了成本。
5.为解决上述技术问题,本发明采取如下技术方案:本发明的一种基于浮式稳桩平台的钢管桩施工系统,其创新点在于:包括浮式稳桩平台、浮式起重船、分体桁架、补偿器和钢管桩;在所述浮式稳桩平台的上表面中间位置设有辅助吊机,且在所述浮式起重船的上表面一侧设有主吊机;在所述浮式稳桩平台的首尾两侧还分别左右舷对称间隔设有数个补偿器,每一所述补偿器分别沿浮式稳桩平台的u型口长度方向水平间隔设置,且其调节端均朝对应u型口的中心方向设置;两个所述分体桁架分别设置在所述浮式稳桩平台的对应u型口处,并分别水平放置在对应所述补偿器上;通过主吊机和辅助吊机的双吊机交叉配合,依次进行分体桁架定位、钢管桩沉桩以及分体桁架回收作业。
6.优选的,每一所述补偿器均包括补偿器外壳、横向补偿气缸、上滑轨、下滑轨、电磁铁、支撑块、第一旋转支架和第二旋转支架;每一所述补偿器外壳均沿浮式稳桩平台的左右舷方向水平设置,且在其下表面两端还竖直间隔设有第一旋转支架和第二旋转支架;每一所述第一旋转支架均设置在远离u型口一侧,且其下端分别与所述浮式稳桩平台的上表面对应位置垂直固定连接,每一所述第一旋转支架的上端分别与对应所述补偿器外壳的下表面对应位置竖直铰接;每一所述第二旋转支架均设置在靠近u型口一侧,且其下端分别与所述浮式稳桩平台的上表面对应位置竖直铰接,每一所述第二旋转支架的上端分别与对应所述补偿器外壳的下表面对应位置抵紧贴合,并分别对对应所述补偿器外壳进行水平支撑;每一所述补偿器壳体的转动方向以及每一所述第二旋转支架的转动方向均为沿浮式稳桩平台的左右舷方向进行竖直转动,且在每一所述补偿器外壳内还同轴心套接设有横向补偿气缸,每一所述横向补偿气缸的活动端分别朝u型口的方向垂直延伸出对应所述补偿器外
壳,并分别与对应所述支撑块同轴心固定连接;在每一所述横向补偿气缸的活动端上下两侧还分别沿其长度方向水平贴合设有上滑轨和下滑轨,且每一所述横向补偿气缸的活动端分别通过上滑轨和下滑轨与对应所述补偿器外壳水平滑动连接,并分别对对应所述支撑块进行竖直方向稳定加强;在每一所述支撑块的上表面还水平贴合设有电磁铁,且每一所述分体桁架分别水平放置在对应所述电磁铁上,并通过横向补偿气缸分别对对应分体桁架进行横向定位调节。
7.优选的,还包括纵向补偿气缸;在每一所述补偿器外壳的下表面靠第二旋转支架一侧还竖直设有纵向补偿气缸,每一所述纵向补偿气缸分别与对应所述第二旋转支架紧靠设置,且其固定端分别与所述浮式稳桩平台的上表面对应位置垂直固定连接,每一所述纵向补偿气缸的活动端分别竖直向上设置,并分别与对应所述补偿器外壳的下表面对应位置抵紧贴合;通过纵向补偿气缸和第二旋转支架的配合使用,对对应分体桁架进行纵向定位调节。
8.优选的,还包括数个垂直度检测机构;在每一所述分体桁架的两侧还分别相对于钢管桩外表面呈90
°
间隔设有两个垂直度检测机构,每一所述垂直度检测机构分别搭载在所述浮式稳桩平台的对应u型口处,且均包括第二定位桩、测量平台、支腿、下底板、上顶板、回转轴承、精调螺母、旋转轴承、旋转底座、测量机头、第一测量孔和第二测量孔;每一所述分体桁架分别通过竖直设置的四个第二定位桩进行海上定位,且在每一所述第二定位桩偏上位置处还同轴心水平套接固定设有测量平台;三个所述支腿呈三角形竖直设置在所述测量平台的上表面靠近钢管桩一侧,且在三个所述支腿的上端还水平固定设有下底板;所述上顶板水平平行间隔设置在所述下底板的正上方,且所述上顶板通过回转轴承与所述下底板水平转动连接;在所述上顶板的正上方还设有u形的旋转底座,所述旋转底座的开口端朝上设置,且其底部通过精调螺母与所述上顶板的上表面相连,并随上顶板进行水平转动;在所述旋转底座的内部还竖直设有测量机头,且所述测量机头通过旋转轴承与所述旋转底座竖直转动连接;在所述测量机头靠近钢管桩的一侧面还左右间隔设有第一测量孔和第二测量孔,且所述第一测量孔和第二测量孔分别绕测量机头进行水平旋转。
9.优选的,还包括行程记录仪;在每一所述分体桁架上还设有行程记录仪,并通过行程记录仪和对应垂直度检测机构的配合使用,对钢管桩沉桩进行垂直度矫正。
10.优选的,还包括第一钢丝绳、吊梁、第二钢丝绳、溜尾c型夹具和第三钢丝绳;所述浮式起重船上的主吊机通过第一钢丝绳与水平设置的所述吊梁的上端相连,且所述吊梁的下端通过第二钢丝绳与水平设置的对应所述钢管桩的上吊耳相连;所述溜尾c型夹具卡接在对应所述钢管桩远离上吊耳一侧的上端口处,且通过第三钢丝绳与所述浮式稳桩平台上的辅助吊机相连;通过主吊机和辅助吊机的配合使用,对钢管桩进行翻身,并通过主吊机对钢管桩进行水平移动。
11.本发明的一种基于浮式稳桩平台的钢管桩施工工艺,其创新点在于包括以下步骤:步骤一:首先纵向补偿气缸的活动端缩回,使第二旋转支架支撑补偿器外壳,再将两个分体桁架分别放置在浮式稳桩平台首尾两侧的对应电磁铁上,然后浮式稳桩平台和浮式起重船分别进场;步骤二:浮式稳桩平台和浮式起重船行进到施工位置后分别定位;然后纵向补偿
气缸的活动端伸出将补偿器外壳顶起,再将第二旋转支架翻身至水平状态,通过横向补偿气缸和纵向补偿气缸的配合,分别对对应分体桁架进行横向及纵向的定位调节,确保分体桁架水平定位;步骤三:然后辅助吊机起吊振动锤,并通过四个第一定位桩将浮式稳桩平台船尾侧的分体桁架进行定位;然后辅助吊机起吊再分别通过第二定位桩对浮式稳桩平台船尾侧的两个垂直度检测机构进行定位;步骤四:然后通过主吊机和辅助吊机的配合使用,对钢管桩进行翻身;再通过主吊机将钢管桩移动至浮式稳桩平台船尾侧的分体桁架处,并通过对应分体桁架对钢管桩进行定位;然后浮式稳桩平台移动使其船尾侧的分体桁架退出u型口,并行进至下一施工位置后再次定位;步骤五:然后通过主吊机起吊打桩锤对钢管桩进行压锤、沉桩;在此过程中,通过垂直度检测机构和行程记录仪的配合使用,对钢管桩沉桩进行垂直度矫正;步骤六:浮式稳桩平台船尾侧的钢管桩沉桩完毕后,浮式起重船回收对应分体桁架,并行进至浮式稳桩平台船尾处,将该分体桁架再次放置在对应电磁铁上;然后再行进至浮式稳桩平台船首处再次定位;然后重复上述步骤二~五对浮式稳桩平台船首侧的钢管桩进行沉桩;步骤七:浮式稳桩平台船首侧的钢管桩沉桩完毕后,主吊机回收打桩锤,同时辅助吊机回收对应分体桁架,并将浮式稳桩平台船首侧的分体桁架再次放置在对应电磁铁上;然后浮式稳桩平台和浮式起重船分别离场。
12.优选的,在上述步骤五中,对钢管桩沉桩进行垂直度矫正的具体流程为:a)首先通过测量机头的第一测量孔根据激光测距原理,测出测量机头至钢管桩的距离l;b)然后测量机头上下转动,对钢管桩边缘进行竖向扫射,并得出测量机头上下旋转角度θ1、第一测量孔与钢管桩第一测点之间的距离l2、第一测量孔与钢管桩第二测点之间的距离l1;再通过公式计算得出钢管桩第一测点与其第二测点之间的间距l3;c)然后第一测量孔和第二测量孔左右旋转,对钢管桩第一测点以及第二测点进行测量,并得出第一测量孔与第二测量孔之间左右旋转的角度θ2;再通过计算得出钢管桩第一测点倾斜的横向距离l4;d)通过公式计算得出钢管桩相对于竖直状态的倾斜角度为θ
x
= arctan(l4/l3);e)通过行程记录仪测出钢管桩下放距离l0,再通过公式计算得出补偿距离为x= l0*sinθ
x
。
13.优选的,在上述步骤b)中,由于测量机头上下旋转角度θ1较小、测量机头至钢管桩的距离l较长,则第一测量孔与钢管桩第一测点之间的距离l2、以及第一测量孔与钢管桩第二测点之间的距离l1都近似于测量机头至钢管桩的距离l,进而得出钢管桩第一测点与其第二测点之间的间距l3=l*tanθ1。
14.优选的,在上述步骤c)中,钢管桩第一测点倾斜的横向距离l4= l*tanθ2。
15.本发明的有益效果:(1)本发明中浮式稳桩平台具备双分体桁架,可以形成流水线作业模式,减少了基础施工中分体桁架定位与回收所用的有效工时,提高了施工效率、节约了成本;
(2)本发明通过设置独立的垂直度检测机构,实现了钢管桩打桩期间的全过程监测,并通过垂直度检测机构与行程记录仪的配合使用,实现了钢管桩的自动矫正,大大提升了钢管桩沉桩过程中的垂直度控制精度。
附图说明
16.为了更清晰地说明本发明实施例中的技术方案,下面将对实施例中所需要使用的附图简单地介绍,显而易见地,下面描述中的附图仅仅是本发明中记载的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他的附图。
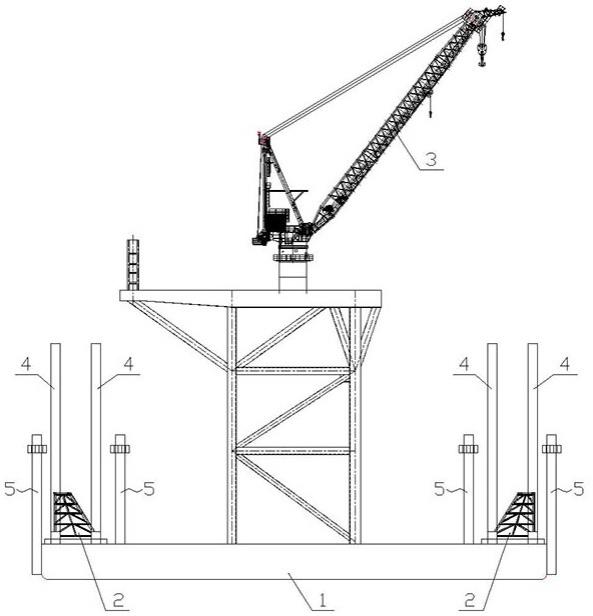
17.图1为本发明浮式稳桩平台的结构示意图。
18.图2为图1的俯视图。
19.图3为本发明分体桁架的侧视图。
20.图4为本发明分体桁架的正视图。
21.图5为本发明补偿器的结构示意图。
22.图6为本发明浮式稳桩平台与浮式起重船的定位示意图。
23.图7为本发明分体桁架与垂直度检测机构的定位示意图。
24.图8为本发明钢管桩起吊示意图。
25.图9为图8中钢管桩翻身示意图。
26.图10为图9中主吊机起吊钢管桩的示意图。
27.图11为图9中辅助吊机起吊钢管桩的示意图。
28.图12为本发明钢管桩自沉示意图。
29.图13为图12的俯视图。
30.图14为本发明钢管桩击锤沉桩示意图。
31.图15为本发明浮式稳桩平台前往下一机位的状态示意图。
32.图16为图1中垂直度检测机构的结构示意图。
33.图17为本发明测量机头测量其与钢管桩之间距离的示意图。
34.图18为本发明测量机头上下转动时l3的计算示意图。
35.图19为本发明第一测量孔和第二测量孔左右转动时l4的计算示意图。
36.图20为本发明θ
x
的计算示意图。
37.图21为本发明钢管桩下放距离的测量示意图。
38.其中,1-浮式稳桩平台;2-分体桁架;3-辅助吊机;4-第一定位桩;5-垂直度检测机构;6-主吊机;7-钢管桩;8-振动锤;9-运输船;10-补偿器;11-吊梁;12-第一钢丝绳;13-第二钢丝绳;14-上吊耳;15-溜尾c型夹具;16-第三钢丝绳;17-打桩锤;18-浮式起重船;19-行程记录仪;101-补偿器外壳;102-横向补偿气缸;103-上滑轨;104-下滑轨;105-电磁铁;106-支撑块;107-纵向补偿气缸;108-第一旋转支架;109-第二旋转支架;501-第二定位桩;502-测量平台;503-支腿;504-回转轴承;505-精调螺母;506-旋转轴承;507-旋转底座;508-测量机头;509-第一测量孔;510-第二测量孔。
具体实施方式
39.下面将通过具体实施方式对本发明的技术方案进行清楚、完整地描述。
40.本发明的一种基于浮式稳桩平台的钢管桩施工系统,包括浮式稳桩平台1、浮式起重船18、分体桁架2、补偿器10和钢管桩7;具体结构如图1~21所示,在浮式稳桩平台1的上表面中间位置设有辅助吊机3,且在浮式起重船18的上表面一侧设有主吊机6;在浮式稳桩平台1的首尾两侧还分别左右舷对称间隔设有数个补偿器10,每一个补偿器10分别沿浮式稳桩平台1的u型口长度方向水平间隔设置,且其调节端均朝对应u型口的中心方向设置;两个分体桁架2分别设置在浮式稳桩平台1的对应u型口处,并分别水平放置在对应补偿器10上;本发明通过主吊机6和辅助吊机3的双吊机交叉配合,依次进行分体桁架2定位、钢管桩7沉桩以及分体桁架2回收作业。
41.本发明中每一个补偿器10均包括补偿器外壳101、横向补偿气缸102、纵向补偿气缸107、上滑轨103、下滑轨104、电磁铁105、支撑块106、第一旋转支架108和第二旋转支架109;如图2、图5所示,每一个补偿器外壳101均沿浮式稳桩平台1的左右舷方向水平设置,且在其下表面两端还竖直间隔设有第一旋转支架108和第二旋转支架109;每一个第一旋转支架108均设置在远离u型口一侧,且其下端分别与浮式稳桩平台1的上表面对应位置垂直固定连接,每一个第一旋转支架108的上端分别与对应补偿器外壳101的下表面对应位置竖直铰接;每一个第二旋转支架109均设置在靠近u型口一侧,且其下端分别与浮式稳桩平台1的上表面对应位置竖直铰接,每一个第二旋转支架109的上端分别与对应补偿器外壳101的下表面对应位置抵紧贴合,并分别对对应补偿器外壳101进行水平支撑;其中,每一个补偿器10壳体的转动方向以及每一个第二旋转支架109的转动方向均为沿浮式稳桩平台1的左右舷方向进行竖直转动;如图2、图5所示,在每一个补偿器外壳101内还同轴心套接设有横向补偿气缸102,每一个横向补偿气缸102的活动端分别朝u型口的方向垂直延伸出对应补偿器外壳101,并分别与对应支撑块106同轴心固定连接;在每一个横向补偿气缸102的活动端上下两侧还分别沿其长度方向水平贴合设有上滑轨103和下滑轨104,且每一个横向补偿气缸102的活动端分别通过上滑轨103和下滑轨104与对应补偿器外壳101水平滑动连接,并分别对对应支撑块106进行竖直方向稳定加强;在每一个支撑块106的上表面还水平贴合设有电磁铁105,且每一个分体桁架2分别水平放置在对应电磁铁105上,并通过横向补偿气缸102分别对对应分体桁架2进行横向定位调节。
42.如图2、图5所示,在每一个补偿器外壳101的下表面靠第二旋转支架109一侧还竖直设有纵向补偿气缸107,每一个纵向补偿气缸107分别与对应第二旋转支架109紧靠设置,且其固定端分别与浮式稳桩平台1的上表面对应位置垂直固定连接,每一个纵向补偿气缸107的活动端分别竖直向上设置,并分别与对应补偿器外壳101的下表面对应位置抵紧贴合;本发明通过纵向补偿气缸107和第二旋转支架109的配合使用,对对应分体桁架2进行纵向定位调节。当浮式稳桩平台1处于行进状态时,纵向补偿气缸107的活动端缩回,使得第二旋转支架109支撑补偿器外壳101,从而避免浮式稳桩平台1在行进过程中的颠簸对纵向补偿气缸107造成损坏;当需要分体桁架2定位时,纵向补偿气缸107的活动端伸出,并将补偿器外壳101顶起,然后将第二旋转支架109翻身至水平状态,便可通过横向补偿气缸102和纵向补偿气缸107的配合,对分体桁架2进行横向以及纵向的定位调节,确保分体桁架2水平定
位。本发明中由于分体桁架2本身重量很重,摩擦力大,所以依靠电磁铁105便可确保分体桁架2放置在浮式稳桩平台1上的稳定性。
43.本发明在每一个分体桁架2的两侧还分别相对于钢管桩7外表面呈90
°
间隔设有两个垂直度检测机构5,如图1~21所示,每一个垂直度检测机构5分别搭载在浮式稳桩平台1的对应u型口处,且均包括第二定位桩501、测量平台502、支腿503、下底板、上顶板、回转轴承504、精调螺母505、旋转轴承506、旋转底座507、测量机头508、第一测量孔509和第二测量孔510;如图16所示,每一个分体桁架2分别通过竖直设置的四个第二定位桩501进行海上定位,且在每一个第二定位桩501偏上位置处还同轴心水平套接固定设有测量平台502;三个支腿503呈三角形竖直设置在测量平台502的上表面靠近钢管桩7一侧,且在三个支腿503的上端还水平固定设有下底板;上顶板水平平行间隔设置在下底板的正上方,且上顶板通过回转轴承504与下底板水平转动连接;如图16所示,在上顶板的正上方还设有u形的旋转底座507,旋转底座507的开口端朝上设置,且其底部通过精调螺母505与上顶板的上表面相连,并随上顶板进行水平转动;在旋转底座507的内部还竖直设有测量机头508,且测量机头508通过旋转轴承506与旋转底座507竖直转动连接;在测量机头508靠近钢管桩7的一侧面还左右间隔设有第一测量孔509和第二测量孔510,且第一测量孔509和第二测量孔510分别绕测量机头508进行水平旋转。
44.如图21所示,在每一个分体桁架2上还设有行程记录仪19,并通过行程记录仪19和对应垂直度检测机构5的配合使用,对钢管桩7沉桩进行垂直度矫正。
45.如图9~11所示,浮式起重船18上的主吊机6通过第一钢丝绳12与水平设置的吊梁11的上端相连,且吊梁11的下端通过第二钢丝绳13与水平设置的对应钢管桩7的上吊耳14相连;溜尾c型夹具15卡接在对应钢管桩7远离上吊耳14一侧的上端口处,且通过第三钢丝绳16与浮式稳桩平台1上的辅助吊机3相连;本发明通过主吊机6和辅助吊机3的配合使用,对钢管桩7进行翻身,然后通过辅助吊机3将溜尾c型夹具15卸下,便可通过主吊机6对钢管桩7进行水平移动。
46.本发明的一种基于浮式稳桩平台的钢管桩施工工艺,包括以下步骤:步骤一:首先纵向补偿气缸107的活动端缩回,使第二旋转支架109支撑补偿器外壳101,再将两个分体桁架2分别放置在浮式稳桩平台1首尾两侧的对应电磁铁105上,然后浮式稳桩平台1和浮式起重船18分别进场;在上述步骤中,需确保在浮式稳桩平台1行进过程中,是由第二旋转支架109支撑补偿器外壳101,从而避免浮式稳桩平台1在行进过程中的颠簸对纵向补偿气缸107造成损坏。
47.步骤二:浮式稳桩平台1和浮式起重船18行进到施工位置后分别定位;然后纵向补偿气缸107的活动端伸出将补偿器外壳101顶起,再将第二旋转支架109翻身至水平状态,通过横向补偿气缸102和纵向补偿气缸107的配合,分别对对应分体桁架2进行横向及纵向的定位调节,确保分体桁架2水平定位。
48.步骤三:然后辅助吊机3起吊振动锤8,并通过四个第一定位桩4将浮式稳桩平台1船尾侧的分体桁架2进行定位;然后辅助吊机3起吊再分别通过第二定位桩501对浮式稳桩平台1船尾侧的两个垂直度检测机构5进行定位。
49.步骤四:然后通过运输船9将钢管桩7运送至浮式稳桩平台1靠近主吊机6和辅助吊
机3一侧,通过主吊机6和辅助吊机3的配合使用,对钢管桩7进行翻身;再通过主吊机6将钢管桩7移动至浮式稳桩平台1船尾侧的分体桁架2处,并通过对应分体桁架2对钢管桩7进行定位;然后浮式稳桩平台1移动使其船尾侧的分体桁架2退出u型口,并行进至下一施工位置后再次定位。
50.步骤五:然后通过主吊机6起吊打桩锤17对钢管桩7进行压锤、沉桩;在此过程中,通过垂直度检测机构5和行程记录仪19的配合使用,对钢管桩7沉桩进行垂直度矫正;在上述步骤中,对钢管桩7沉桩进行垂直度矫正的具体流程为:a)首先通过测量机头508的第一测量孔509根据激光测距原理,测出测量机头508至钢管桩7的距离l;b)然后测量机头508上下转动,对钢管桩7边缘进行竖向扫射,并得出测量机头508上下旋转角度θ1、第一测量孔509与钢管桩7第一测点之间的距离l2、第一测量孔509与钢管桩7第二测点之间的距离l1;再通过公式计算得出钢管桩7第一测点与其第二测点之间的间距l3;其中,由于测量机头508上下旋转角度θ1较小、测量机头508至钢管桩7的距离l较长,则第一测量孔509与钢管桩7第一测点之间的距离l2、以及第一测量孔509与钢管桩7第二测点之间的距离l1都近似于测量机头508至钢管桩7的距离l,进而得出钢管桩7第一测点与其第二测点之间的间距l3=l*tanθ1;c)然后第一测量孔509和第二测量孔510左右旋转,对钢管桩7第一测点以及第二测点进行测量,并得出第一测量孔509与第二测量孔510之间左右旋转的角度θ2;再通过计算得出钢管桩7第一测点倾斜的横向距离l4= l*tanθ2;d)通过公式计算得出钢管桩7相对于竖直状态的倾斜角度为θ
x
= arctan(l4/l3);e)通过行程记录仪19测出钢管桩7下放距离l0,再通过公式计算得出补偿距离为x= l0*sinθ
x
。
51.步骤六:浮式稳桩平台1船尾侧的钢管桩7沉桩完毕后,浮式起重船18回收对应分体桁架2,并行进至浮式稳桩平台1船尾处,将该分体桁架2再次放置在对应电磁铁105上;然后再行进至浮式稳桩平台1船首处再次定位;然后重复上述步骤二~五对浮式稳桩平台1船首侧的钢管桩7进行沉桩。
52.步骤七:浮式稳桩平台1船首侧的钢管桩7沉桩完毕后,主吊机6回收打桩锤17,同时辅助吊机3回收对应分体桁架2,并将浮式稳桩平台1船首侧的分体桁架2再次放置在对应电磁铁105上;然后浮式稳桩平台1和浮式起重船18分别离场。
53.本发明的有益效果:(1)本发明中浮式稳桩平台1具备双分体桁架2,可以形成流水线作业模式,减少了基础施工中分体桁架2定位与回收所用的有效工时,提高了施工效率、节约了成本;(2)本发明通过设置独立的垂直度检测机构5,实现了钢管桩7打桩期间的全过程监测,并通过垂直度检测机构5与行程记录仪19的配合使用,实现了钢管桩7的自动矫正,大大提升了钢管桩7沉桩过程中的垂直度控制精度。
54.上面所述的实施例仅仅是本发明的优选实施方式进行描述,并非对本发明的构思和范围进行限定,在不脱离本发明设计构思的前提下,本领域中普通工程技术人员对本发明的技术方案作出的各种变型和改进均应落入本发明的保护范围,本发明的请求保护的技
术内容,已经全部记载在技术要求书中。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1