一种爬索机器人的制作方法
[0001]
本发明涉及索道检测技术领域,尤其是一种爬索机器人。
背景技术:
[0002]
本文所述的索道主要用于斜拉索桥梁的索道表观检测,但是其不限于此,还适用于管状物的爬行检测。由于桥梁索道较高,人工无法进行全面检测。仅能观测到距桥面几米的位置,远处则无法检测。
[0003]
为此,申请人特提出了专利申请号为“202010168458.3”、名称为“一种预紧式爬索机器人”的中国发明专利,其包括沿斜拉索桥梁的索道方向布设的第一框架支撑杆和第二框架支撑杆,跨接并固定连接在第一框架支撑杆与第二框架支撑杆之间的数根跨接板,相背布设并固定在跨接板底部的第一驱动组件和第二驱动组件,顶部与跨接板连接的预紧机构,顶部一一对应与第一框架支撑杆和第二框架支撑杆固定连接、并置于斜拉索桥梁的索道的两侧的两块调节支架,开设在任一调节支架上的数个辅助轮挂钩,挂接在两块调节支架的同一高度的辅助轮挂钩上、且挤压在斜拉索桥梁的索道外表面的辅助轮,以及固定在跨接板上、用于拍摄斜拉索桥梁的索道的表面图像的表观相机。另外,还提出了专利申请号为“202010168425.9”、名称为“一种动力均布式自适应爬索机器人”的中国发明专利,虽然其能实现索道攀爬和表观检测,但是,对应直径较大的索道,其需要设置对台配合使用;不仅如此,其表观相机拍摄的图像只是索道的局部表面,因此,检索时需要多次攀爬才能完成整体检测。
[0004]
因此,急需要提出一种结构简单、适用范围广、检测效率高的爬索机器人。
技术实现要素:
[0005]
针对上述问题,本发明的目的在于提供一种爬索机器人,本发明采用的技术方案如下:
[0006]
一种爬索机器人,沿斜拉索桥梁的索道方向攀爬并拍摄索道表面的图像,所述爬索机器人包括爬索机器人本体,所述爬索机器人本体上设置带挂钩的调节支架,所述调节支架上挂接有一辅助轮机构,所述爬索机器人还包括固定在爬索机器人本体上、用于拍摄索道周向方向的图像的检测机构;所述检测机构包括与爬索机器人本体固定连接、并将索道周向方向均匀切分的数个挡板,以及设置在相邻的挡板之间、并朝向索道的表观相机。
[0007]
进一步地,所述检测机构包括固定在爬索机器人本体上的横梁,一一对应垂直固定在横梁的端部的第一竖杆和第二竖杆,一端固定在横梁上、沿索道的轴向方向布设、且底部与索道表面贴近的第一挡板,一端固定在第一竖杆上、沿索道的轴向方向布设、且与索道表面贴近的第二挡板,一端固定在第二竖杆上、沿索道的轴向方向布设、且与索道表面贴近的第三挡板,固定在横梁上、且置于第一挡板与第二挡板之间的第一表观相机,固定在横梁上、且置于第一挡板与第三挡板之间的第二表观相机,以及固定在第二竖杆上、且置于第二挡板与第三挡板之间的第三表观相机;
[0008]
所述第一挡板、第二挡板和第三挡板将索道的周向方向均匀切分。
[0009]
更进一步地,所述检测机构还包括设置在横梁与第一表观相机之间的第一表观相机支架,设置在横梁与第二表观相机之间的第二表观相机支架,以及设置在第二竖杆与第三表观相机之间的第三表观相机支架。
[0010]
进一步地,所述检测机构还包括一端固定在横梁上、且沿索道的轴向方向布设的第一横杆,以及设置在第一横杆的另一端的距离传感器。
[0011]
更进一步地,所述辅助轮机构包括沿索道的轴向方向布设、且互相平行的两根辅助轮支撑杆,与辅助轮支撑杆的中部固定连接、且与调节支架挂接连接的挂钩轴,以及一一对应设置在两根辅助轮支撑杆的两端部之间的辅助轮。
[0012]
与现有技术相比,本发明具有以下有益效果:
[0013]
(1)本发明巧妙地设置了检测机构,其将索道周向方向均匀切分,并在相邻的挡板之间设置朝向索道的表观相机,其既能保证表观相机拍摄有效地索道表面图像,又能解决图像中存在重叠和无关的内容,还能一次性攀爬拍摄索道周向的全部图像,以提高检测效率,减少后期图像处理的工作量,实现一举多得的效果;
[0014]
(2)本发明巧妙地设置了辅助轮机构,并且设置有两个辅助轮,以保证爬索机器人运行平稳,使得攀爬受力均匀;
[0015]
(3)本发明通过挂钩轴在调整调节支架的挂钩位置,以实现不同直径的索道的检测,其适用范围广,无需设置多台爬索机器人。
[0016]
综上所述,本发明具有结构简单、适用范围广、检测效率高等优点,在索道检测技术领域具有很高的实用价值和推广价值。
附图说明
[0017]
为了更清楚地说明本发明实施例的技术方案,下面将对实施例中所需使用的附图作简单介绍,应当理解,以下附图仅示出了本发明的某些实施例,因此不应被看作是对保护范围的限定,对于本领域技术人员来说,在不付出创造性劳动的前提下,还可以根据这些附图获得其他相关的附图。
[0018]
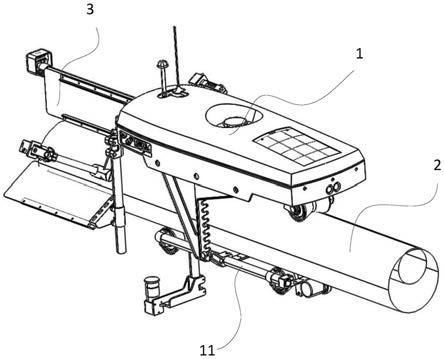
图1为本发明的结构示意图(一)。
[0019]
图2为本发明的结构示意图(二)。
[0020]
图3为本发明的辅助轮机构结构示意图。
[0021]
图4为本发明的检测机构的结构示意图(一)。
[0022]
图5为本发明的检测机构的结构示意图(二)。
[0023]
上述附图中,附图标记对应的部件名称如下:
[0024]
1、爬索机器人本体;2、索道;3、检测机构;11、辅助轮机构;13、调节支架;31、横梁;32、第一竖杆;33、第二竖杆;34、第一挡板;35、第二挡板;36、第三挡板;37、第一表观相机;38、第二表观相机;39、第三表观相机;111、辅助轮支撑杆;112、挂钩轴;113、辅助轮;311、第一横杆;312、距离传感器;371、第一表观相机支架;381、第二表观相机支架;391、第三表观相机支架。
具体实施方式
[0025]
为使本申请的目的、技术方案和优点更为清楚,下面结合附图和实施例对本发明作进一步说明,本发明的实施方式包括但不限于下列实施例。基于本申请中的实施例,本领域普通技术人员在没有做出创造性劳动的前提下所获得的所有其他实施例,都属于本申请保护的范围。
[0026]
实施例
[0027]
如图1至图5所示,本实施例提供了一种爬索机器人,其沿斜拉索桥梁的索道方向攀爬并拍摄索道表面的图像。需要说明的是,本实施例中所述的“第一”、“第二”等序号用语仅用于区分同类部件,不能理解成对保护范围的特定限定。另外,本实施例中所述“底部”、“顶部”、“四周边缘”、“中央”等方位性用语是基于附图来说明的。
[0028]
在本实施例中,该爬索机器人包括爬索机器人本体1,设置在爬索机器人本体1上、且带挂钩的调节支架13,挂接在调节支架13上的辅助轮机构11,以及固定在爬索机器人本体1上、用于拍摄索道周向方向的图像的检测机构3。
[0029]
其中,检测机构3将索道周向方向均匀分成3~4部分,综合考虑到设备的成本、结构、拍摄的覆盖面积、安装难易度等等因素,本实施例的检测机构3将索道周向方向均匀分成3部分,因此,该检测机构3包括固定在爬索机器人本体1上的横梁31,一一对应垂直固定在横梁31的端部的第一竖杆32和第二竖杆33,一端固定在横梁31上、沿索道的轴向方向布设、且底部与索道表面贴近的第一挡板34,一端固定在第一竖杆32上、沿索道的轴向方向布设、且与索道表面贴近的第二挡板35,一端固定在第二竖杆33上、沿索道的轴向方向布设、且与索道表面贴近的第三挡板36,固定在横梁31上、且置于第一挡板34与第二挡板35之间的第一表观相机37,固定在横梁31上、且置于第一挡板34与第三挡板36之间的第二表观相机38,以及固定在第二竖杆33上、且置于第二挡板35与第三挡板36之间的第三表观相机39;另外,在横梁31与第一表观相机37之间设置第一表观相机支架371,在横梁31与第二表观相机38之间设置第二表观相机支架381,且在第二竖杆33与第三表观相机39之间设置第三表观相机支架391。另外,本实施例在横梁31上固定有沿索道的轴向方向布设的第一横杆311,并且在第一横杆311上设置有距离传感器312。本实施例的第一挡板、第二挡板和第三挡板均与索道的径向方向重合,且第一表观相机、第二表观相机和第三表观相机均垂直朝向索道,并于索道的径向方向重合,为了保证拍摄的图像有效可靠,表观相机通常处于相邻的挡板之间的中间位置。
[0030]
在本实施例中,为了保证受力和攀爬可靠,对辅助轮机构进行了改进,其1包括沿索道的轴向方向布设、且互相平行的两根辅助轮支撑杆111,与辅助轮支撑杆111的中部固定连接、且与调节支架13挂接连接的挂钩轴112,以及一一对应设置在两根辅助轮支撑杆111的两端部之间的辅助轮113。
[0031]
在本实施例中,根据索道2的之间选择合适的挂钩,并安装辅助轮机构11;本实施例通过调整挡板和表观相机支架的位置,以实现索道周向的均匀分割,并启动爬索机器人本体,沿索道方向行进,并拍摄索道表面的图像,其检测效率是申请人提出的爬索机器人的3~4倍。
[0032]
上述实施例仅为本发明的优选实施例,并非对本发明保护范围的限制,但凡采用本发明的设计原理,以及在此基础上进行非创造性劳动而作出的变化,均应属于本发明的
保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1