试验路段填筑施工装置及其施工方法与流程
1.本申请涉及道路填筑施工的领域,尤其是涉及一种试验路段填筑施工装置及其施工方法。
背景技术:
2.路基是轨道或者路面的基础,是经过开挖或填筑而形成的土工构筑物。路基的主要作用是为轨道或者路面铺设及列车或行车运营提供必要条件,并承受轨道及机车车辆或者路面及交通荷载的静荷载和动荷载,同时将荷载向地基深处传递与扩散。路基一般是通过填料、摊铺和压实这个顺序进行填筑的,在摊铺过程中一般还需要将将每层路基找平,然后才能进行压实。
3.现有的授权公告号为cn206625267u的中国专利公开了一种平地机,包括机体,机体的前端设置有用于刮地的铲刀,铲刀上表面两侧均设置有气缸,气缸连接有连杆,连杆端部固定连接有安装板,安装板包括平行于铲刀上边沿设置的转轴,刮板转动连接于转轴并且刮板绕转轴转动到铲刀背部,安装板与所述刮板之间还设置有用于对刮板进行定位的定位组件,安装板上还设置有用于调节所述刮板与所述铲刀表面压紧度的调节组件,铲刀上还设置有用于对铲刀表面进行冲洗的冲洗机构。
4.针对上述中的相关技术,发明人认为在使用该设备进行找平工作时,需要对一段路基进行来回的找平,在过程中,需要不断的调转设备自身的方向,使得铲刀可以沿行进方向进行找平,但是施工范围较小时,设备的调转会较为困难,导致路基的找平施工受到影响。
技术实现要素:
5.为了便于实现铲刀方向的调转,本申请提供一种试验路段填筑施工装置及其施工方法。
6.本申请提供的一种试验路段填筑施工装置及其施工方法采用如下的技术方案:第一方面,本申请提供一种试验路段填筑施工装置,采用如下的技术方案:一种试验路段填筑施工装置,包括机体,所述机体上设置有支撑杆,所述支撑杆上设置有铲刀,所述铲刀位于所述支撑杆下方,所述支撑杆上位于铲刀的位置设置有固定座,所述固定座转动连接于支撑杆上,所述固定座上转动连接有支撑座,所述支撑座与铲刀之间设置有连接杆,所述连接杆的一端与支撑座固定连接,另一端与铲刀固定连接,所述连接杆设置为可伸缩结构,所述支撑座上设置有用于驱动连接杆伸缩的伸缩装置,所述固定座上设置有用于驱动支撑座转动的第一驱动装置,所述支撑杆上设置有用于驱动固定座转动的第二驱动装置。
7.通过采用上述技术方案,在进行路基的整平工作时,利用伸缩装置使连接杆伸长,使铲刀抵接到路基上,随后沿路基的长度方向来回对路基进行整平,在行进方向调转时,工作人员可以启动伸缩装置使连接杆收缩,使得铲刀被收回,然后启动第二驱动装置,第二驱
动装置会带动固定座转动,使固定座带动支撑座以及铲刀转动至支撑杆上方,工作人员再启动第一驱动装置,第一驱动装置会带动支撑座转动,支撑座会带动连接杆转动,从而带动铲刀调转方向,当铲刀转动180度后,工作人员再利用第二驱动装置使铲刀转动至支撑杆下方,并利用伸缩装置使铲刀重新抵接到路基上,此时铲刀的方向与机体将要移动的行进方向相同,如此便使得工作人员无需去调转整个机体的方向,在施工范围较小时,工作人员可以更好地对路基进行找平,使得路基的找平施工更加方便。
8.可选的,所述可伸缩结构包括与固定座转动连接的固定管,所述固定管内滑动插接有移动杆,所述移动杆远离固定管的一端与铲刀固定连接,所述伸缩装置包括设置在支撑座上的电缸,所述电缸的驱动端与移动杆固定连接。
9.通过采用上述技术方案,在需要使铲刀沿连接杆方向移动时,工作人员启动电缸,电缸的驱动端会带动移动杆伸出或缩回固定管,使得连接杆的长度伸长或缩短,从而使得铲刀可以沿连接杆方向移动,利用固定管和移动杆实现了连接杆的可伸缩,而利用电缸则使得工作人员可以更方便地控制铲刀移动。
10.可选的,所述固定座上开设有容纳槽,所述固定座与支撑座之间设置有安装杆,所述安装杆的一端转动连接于容纳槽内,另一端与支撑座固定连接,所述第一驱动装置包括设置在容纳槽内的第一电机,所述第一电机的驱动端上同轴连接第一齿轮,所述安装杆上套设且固定连接有第一齿条,所述第一齿轮与第一齿条互相啮合。
11.通过采用上述技术方案,在需要调转铲刀的朝向时,工作人员启动第一电机,第一电机带动第一齿轮转动,此时由于第一齿轮和第一齿条相互啮合,因此第一齿轮会带动第一齿条转动,而第一齿条是固定套设在安装杆上的,从而使得安装杆发生转动,安装杆则会带动支撑座转动,进而使得连接杆和铲刀转动,如此便可以实现铲刀朝向的调整,且整体结构简单,更便于使用。
12.可选的,所述固定座上设置有固定环,所述固定环套设且转动连接于支撑杆上,所述第二驱动装置包括设置在支撑杆上的第二电机,所述第二电机上设置有第二齿轮,所述固定环上沿着固定环的周向设置有第二齿条,所述第二电机与第二齿条互相啮合。
13.通过采用上述技术方案,在调转铲刀方向前,需要将铲刀转动至支撑杆上方,工作人员启动第二电机,第二电机带动第二齿轮转动,由于第二齿轮与第二齿条互相啮合,因此第二齿条会随着第二齿轮转动,第二齿条则会带动固定环转动,使得固定环带动固定座转动,固定座则可以带动支撑座以及铲刀转动至支撑杆上,从而使得铲刀有足够的空间进行方向的调转。
14.可选的,所述支撑杆位于固定环的位置开设有限位槽,所述固定环转动连接于限位槽内。
15.通过采用上述技术方案,限位槽的设置使得固定环在转动过程中不会出现位置偏移的情况,使得固定环可以更好地带动固定座、支撑座和铲刀转动。
16.可选的,所述容纳槽内设置有固定轴承,所述安装杆的端部穿设于固定轴承的内圈且与固定轴承过盈配合。
17.通过采用上述技术方案,固定轴承的设置实现了安装杆的转动,并且使得安装杆与固定座之间的连接更加紧密。
18.可选的,所述支撑杆上位于第二电机所在的位置设置有防护罩,所述第二电机和
第二齿轮均位于防护罩内。
19.通过采用上述技术方案,防护罩可以对第二电机和第二齿轮形成防护,避免第二电机和第二齿轮直接暴露在外,减少了发生第二电机和第二齿轮被损坏的情况。
20.第二方面,本申请提供一种试验路段填筑施工方法,采用如下的技术方案:一种试验路段填筑施工方法,包括所述的试验路段填筑施工装置,其特征在于,包括如下步骤:s1:基底处理步骤,对将要进行填筑施工的路段的基底进行清理;s2:分层填筑步骤,根据压实机械压实能力、填料种类和要求的压实质量,将材料由下至上分层填筑;s3:摊铺整平步骤,填筑区段完成一层填料后,利用施工装置对摊铺面进行整平,摊铺过程中,利用伸缩装置、第一驱动装置和第二驱动装置实现铲刀方向的调转,实现快速整平;s4:碾压夯实步骤,采用压路机对填料进行碾压;s5:检验步骤,对每一层路基的压实度进行检测;s6:路基整修步骤,整修路基使路基高度、宽度、横坡、平整度满足设计要求。
21.通过采用上述技术方案,利用伸缩装置、第一驱动装置和第二驱动装置使得铲刀方向可以根据机体将要行进的方向调转,工作人员无需去调转整个机体的方向,从而使得路基找平的施工更加方便。
22.综上所述,本申请包括以下至少一种有益技术效果:通过在支撑杆上转动连接固定座,在固定座上转动连接支撑座,在支撑座上设置连接杆,将铲刀固定在连接杆上,并使连接杆可伸缩,再利用伸缩装置、第一驱动装置和第二驱动装置来分别实现连接杆的伸缩、支撑座的转动和固定座的转动,从而实现铲刀方向的调转,而无需工作人员去调转机体的方向,使得路基的找平施工更加方便。
附图说明
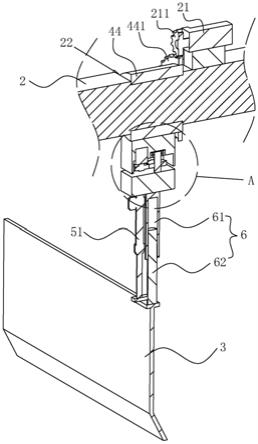
23.图1是本申请实施例的整体结构示意图;图2是图1中铲刀处的部分剖面结构示意图;图3是图2中a部分的局部放大示意图。
24.附图标记说明:1、机体;2、支撑杆;21、第二电机;211、第二齿轮;22、限位槽;23、防护罩;3、铲刀;4、固定座;41、安装杆;411、第一齿条;42、第一电机;421、第一齿轮;43、容纳槽;431、固定轴承;44、固定环;441、第二齿条;5、支撑座;51、电缸;6、连接杆;61、固定管;62、伸缩杆。
具体实施方式
25.以下结合附图1-3对本申请作进一步详细说明。
26.本申请实施例公开一种试验路段填筑施工装置。
27.参照图1和图2,一种试验路段填筑施工装置,包括机体1,机体1由驾驶室、车轮以及行进组件组成,行进组件可以带动车轮转动实现机体1的移动,机体1上一体连接有支撑杆2,支撑杆2上设置有铲刀3,在初始状态下,铲刀3位于支撑杆2下方,并且铲刀3可以抵接
到路基上,机体1移动时带动铲刀3移动,从而实现对路基的找平;支撑杆2上位于铲刀3的位置转动连接有固定座4,固定座4沿垂直于支撑杆2的方向转动,固定座4上转动连接有支撑座5,支撑座5与铲刀3之间通过连接杆6连接,支撑座5可以带动铲刀3在水平方向转动,使得铲刀3朝向发生变化,而连接杆6的一端与支撑座5焊接,另一端与铲刀3通过螺栓固定连接,并且连接杆6为可伸缩结构;支撑座5上设置有伸缩装置,伸缩装置可以驱动连接杆6伸缩,固定座4上设置有第一驱动装置,第一驱动装置可以驱动支撑座5转动,支撑杆2上设置有第二驱动装置,第二驱动装置可以驱动固定座4转动。
28.在需要调转铲刀3的方向时,工作人员首先启动伸缩装置使连接杆6收缩,使得铲刀3收回,从而便于铲刀3在垂直方向转动,随后工作人员启动第二驱动装置,第二驱动装置带动固定座4转动,使得固定座4带动支撑座5和铲刀3转动180度至支撑杆2上方,此时铲刀3有足够的空间进行调转,然后工作人员启动第一驱动装置,第一驱动装置带动支撑座5转动,使得支撑座5带动铲刀3转动180度,从而实现铲刀3朝向的改变,最后工作人员再利用第一驱动装置使铲刀3转回至支撑杆2下方,并利用伸缩装置使铲刀3抵接到路基上即可,如此便使得工作人员无需调转整个机体1的方向,使得路基的找平工作更加方便。
29.参照图2,连接杆6包括固定管61和移动杆,固定管61与固定座4焊接,移动杆滑动插接于固定管61内,移动杆远离固定管61的一端一体成型有连接块(图中未示出),连接块通过螺栓与铲刀3固定连接,伸缩装置包括固定连接在支撑座5上的电缸51,电缸51的驱动端与移动杆靠近铲刀3的一端固定连接;启动电缸51后,电缸51带动移动杆伸出或缩回固定管61,使得连接杆6伸长或缩短,从而使得铲刀3沿连接杆6的方向移动,在其他实施例中,伸缩装置也可以采用气缸或液压缸。
30.参照图2和图3,固定座4上一体成型有固定环44,固定环44套设且转动连接于支撑杆2上,支撑杆2上位于固定环44的位置开设有限位槽22,固定环44位于限位槽22内,限位槽22可以对固定环44的位置启动限制作用,第二驱动装置包括第二电机21,第二电机21通过螺栓固定在支撑杆2上,第二电机21的驱动端上同轴固定连接有第二齿轮211,而固定环44上沿着固定环44的周向焊接有第二齿条441,第二电机21与第二齿条441互相啮合。
31.参照图1,为了避免第二电机21和第二齿轮211直接暴露在外侧,在支撑杆2上位于第二电机21所在的位置设置有防护罩23,第二电机21和第二齿条441均位于防护罩23内,防护罩23可以对第二电机21和第二齿轮211起到一定的防护作用。
32.在需要调转铲刀3朝向时,由于机体1和支撑杆2位置的限制以及铲刀3大小的问题,铲刀3不能直接调转,因此需要使铲刀3有足够的空间进行调转,此时工作人员便需要先启动第二电机21,使第二电机21带动第二齿轮211转动,利用第二齿轮211带动第二齿条441转动,实现固定环44的转动,使得固定环44可以带动固定座4以及铲刀3转动,直至铲刀3位于支撑杆2上方,此时铲刀3便可以进行调转,且整体结构简单,便于使用。
33.参照图2和图3,固定座4与支撑座5之间设置有安装杆41,安装杆41的一端与固定座4转动连接,另一端与支撑座5固定连接,第一驱动装置包括第一电机42,第一电机42固定连接在固定座4上,第一电机42的驱动端上同轴固定连接有第一齿轮421,安装杆41靠近固定座4的端部上套设且固定连接有第一齿条411,第一齿轮421与第一齿条411互相啮合,为了对第一电机42和第一电机42形成保护,在固定座4上开设有容纳槽43,第一电机42和第一齿轮421均位于容纳槽43内,同时在容纳槽43的内壁上固定安装有固定轴承431,安装杆41
的端部穿设于固定轴承431的内圈内且与固定轴承431过盈配合,如此便使得安装杆41可以在固定座4上转动。
34.在使铲刀3转动至支撑杆2上方后,工作人员启动第一电机42,第一电机42带动第一齿轮421转动,第一齿轮421再带动第一齿轮421转动,从而使得安装杆41转动,安装杆41再带动支撑座5转动,进而使得铲刀3转动,如此便实现了铲刀3朝向的调转。
35.本申请实施例一种试验路段填筑施工装置的实施原理为:在进行路基的整平工作时,启动电缸51使连接杆6伸长,使铲刀3抵接到路基上,随后沿路基的长度方向来回对路基进行整平;在行进方向调转时,工作人员启动电缸51使连接杆6收缩,使铲刀3被收回,然后启动第二电机21,第二电机21带动固定座4沿垂直于支撑杆2的方向转动,使固定座4带动支撑座5以及铲刀3转动至支撑杆2上方,随后工作人员再启动第一电机42,第一电机42会带动支撑座5转动,支撑座5会带动连接杆6转动,从而带动铲刀3调转方向,当铲刀3转动180度后,工作人员再利用第二电机21使铲刀3转动至支撑杆2下方,并利用电缸51使铲刀3重新抵接到路基上,此时铲刀3的方向与机体1将要移动的行进方向相同,如此便使得工作人员无需去调转整个机体1的方向,在施工范围较小时,工作人员可以更好地对路基进行找平,使得路基的找平施工更加方便。
36.本申请实施例还公开一种试验路段填筑施工方法,包括所述的试验路段填筑施工装置,包括如下步骤:s1:基底处理步骤,对将要进行填筑施工的路段的基底进行清理;s2:分层填筑步骤,根据压实机械压实能力、填料种类和要求的压实质量,将材料由下至上分层填筑;s3:摊铺整平步骤,填筑区段完成一层填料后,利用所述的施工装置对摊铺面进行整平,做到摊铺面在纵横向平顺均匀,并做4%的横坡,每层进行压实时,要不断地进行整平,保证均匀一致的平整度;摊铺过程中,在需要调转机体1行进方向时,利用伸缩装置、第一驱动装置和第二驱动装置实现铲刀3方向的调转,实现快速整平;s4:碾压夯实步骤,采用压路机对填料进行碾压,碾压时先两侧后中间,各种压路机的最大碾压行驶速度不超过4km/h,各区段交接处要挖台阶,纵向搭接长度不小于2米,横向碾压重叠不小于0.4米,上下两层填筑接头应错开不小于3m,做到无漏压、无死角,确保压实均匀;s5:检验步骤,对每一层路基的压实度进行检测,检测指标为压实系数k、地基系数k30,压实系数检测采用灌砂法,检测项目合格后,方可进行下一层施工;s6:路基整修步骤,整修路基使路基高度、宽度、横坡、平整度满足设计要求。
37.通过采用上述技术方案,利用伸缩装置、第一驱动装置和第二驱动装置使得铲刀3方向可以根据机体1将要行进的方向调转,工作人员无需去调转整个机体1的方向,从而使得路基找平的施工更加方便。
38.以上均为本申请的较佳实施例,并非依此限制本申请的保护范围,故:凡依本申请的结构、形状、原理所做的等效变化,均应涵盖于本申请的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1