一种外挂式压路机无人辅助驾驶系统
1.本发明涉及一种外挂式压路机无人辅助驾驶系统技术领域。
背景技术:
2.现阶段公路建设中提出的无人驾驶压路机通常采用控制其内部油路结构来实现压路机的振动控制、行走控制、转向控制和制动控制,这种类型的无人驾驶压路机存在其局限性,通常为压路机生产厂家将无人控制系统集成封装于压路机底盘内部,从而实现该压路机的无人驾驶。
3.如夏磐夫等人(夏磐夫,高亮.压路机无人驾驶设计探讨[j].筑路机械与施工机械化,2019,36(06):22
‑
26.)给出了一种压路机无人驾驶设计探讨,执行硬件中优选电控硬件而不是机械硬件,其中行走速度和转向角度采用电控比例泵和电控比例转向阀,减速通过控制电控比例泵的排量实现。这种技术将无人驾驶理念局限到厂家生产的无人驾驶压路机上,不具有普适性,工程中使用更多的是由普通驾驶工人驾驶的对施工区域反复碾压作业的普通压路机,若要以上述方法实现此类压路机的无人驾驶功能,需要对压路机底盘油路、电路进行较大的改动,将控制器封装至压路机底盘内部来实现无人控制,成本和时间花费大,不适用,且对于不同型号的压路机其内部油路电路封装方式不同,改装方法也不相同,实施较为困难。且此类方案更多的应用于新出厂的无人驾驶压路机的设计方案,对于普通压路机的改装应用较少。
[0004]
而本发明为一种外挂式压路机无人辅助驾驶系统,解决了由驾驶员驾驶的普通压路机到无人驾驶压路机改装费时费力且不经济的问题,控制器无需接入压路机底盘电路,通过现场安装的方式将辅助控制器及机械臂装置安装至普通压路机驾驶舱内,装卸方便快捷,无需变动压路机底盘,避免了对压路机底盘复杂油路电路改装,具有安装简便、原理简单、成本低的优势。
技术实现要素:
[0005]
本发明针对现有技术的不足,提出一种适用于所有压路机的外挂式压路机无人辅助驾驶系统,该辅助驾驶系统为针对于驾驶员驾驶的普通压路机的无人化快捷式改装,实现普通压路机的无人驾驶。
[0006]
本发明解决所述技术问题采用的技术方案是:
[0007]
一种外挂式压路机无人辅助驾驶系统,其特征在于,该辅助驾驶系统用于有人驾驶的压路机上,对有人驾驶的压路机进行改装,在压路机上安装车载gps,以判别压路机实时位置信息;在压路机前、后位置均装有毫米波雷达,以判别压路机车道实时路况信息;振动传感器安装至压路机振动轮轮轴上;温度传感器吸附在压路机中部底端,温度传感器、车载gps、振动传感器的输出端均与车载数据箱相连;车载数据箱与辅助控制器相连,辅助控制器能通过车载数据箱获取车载gps、温度传感器、振动传感器采集的实时数据;
[0008]
驾驶室的方向盘通过第一过渡部件连接转向液压机械臂,驾驶室的挡位处通过第
二过渡部件连接挡位液压机械臂,转向液压机械臂的固定端与机箱固定,机箱的延伸部连接底座,挡位液压机械臂的固定端固定底座上,转向液压机械臂能够控制方向盘的转动;所述机箱内装载车载数据箱、辅助控制器,辅助控制器同时与控制电门、转向液压机械臂、挡位液压机械臂、前后两个毫米波雷达电连接;
[0009]
所述控制电门并联在有人驾驶的压路机的振动控制电路的振动开关上,通过车载gps、毫米波雷达的场景感知与位置感知,将场景和位置信息传递给辅助控制器,辅助控制器在确认位置和场景后将压路机动作指令传递给相应的执行系统,以实现对压路机前进、后退、变道、开振的操作,所述执行系统包括控制电门和两个液压机械臂。
[0010]
所述辅助控制器内存储的指令包括:
[0011]
前进指令:控制挡位液压机械臂收缩固定的前进角度,
[0012]
停车指令:控制挡位液压机械臂伸张或收缩至恢复控制挡位液压机械臂的原长,
[0013]
后退指令:控制挡位液压机械臂伸张固定的后退角度,
[0014]
减速指令:实时速度超过规范要求的最大速度,控制挡位液压机械臂在固定的前进角度或后退角度基础上再伸张或收缩一段距离,
[0015]
加速指令:实时速度超过规范要求的最小速度,控制挡位液压机械臂在固定的前进角度或后退角度基础上再收缩或伸张一段距离,
[0016]
左转指令:控制转向液压机械臂伸张固定的左转角度,压路机向左转弯;
[0017]
右转指令:控制转向液压机械臂伸张固定的右转角度,压路机向右转弯;
[0018]
机身回正指令:控制转向液压机械臂在固定左转或右转角度的基础上再收缩一段距离,使压路机机身回正;
[0019]
开启指令:控制控制电门开启,
[0020]
断开指令:当压路机由行进转为停止前,辅助控制器控制控制电门关闭;
[0021]
变道操作,设定变道固定收缩角度和需要转向的距离,根据这两个值获得需要变道操作时长,辅助控制器依次向方向盘及挡位处的液压机械臂发出控制指令,首先向挡位机械臂发出前进指令,再使转向液压机械臂伸张,保持向即将变道的道路方向倾斜的趋势一段时间,再使转向液压机械臂收缩,保持压路机倾斜向左或右前方行驶,最后使转向液压机械臂伸张至原长,将压路机车身回正,压路机完成变道操作。
[0022]
该辅助驾驶系统的具体的工作过程是:
[0023]
一、压路机行驶及变道操作
[0024]
转向液压机械臂收缩,方向盘右转,压路机向右转向;转向液压机械臂伸张,方向盘左转,压路机向左转向;
[0025]
当挡位液压机械臂正常情况下挡位处于驻车状态,压路机既不前进也不后退;当挡位液压机械臂收缩时,挡位处于前进档状态,此时压路机向前行驶;当挡位液压机械臂伸张时,挡位处于后退档状态,此时压路机向后行驶;
[0026]
二、压路机起振
[0027]
将控制电门连接到压路机振动控制电路中,以此代替压路机振动按钮对振动开启的控制,在压路机行进至工作区域后,辅助控制器传递开启指令给控制电门,控制电门的开关闭合,压路机开始振动压实工作;当由行进转为停止前,辅助控制器传递断开指令给电门控制开关,控制开关断开,以防止压路机停车后,振动依然开始对场地局部地区产生破坏;
[0028]
三、压路机机械避障
[0029]
压路机前后分别装有两个毫米波雷达,对压路机前后进行扫描操作,在压路机工作过程中,当毫米波雷达扫描出规定范围内有人或障碍物后,将信息传递到辅助控制器,辅助控制器经避障检测单元判断出在规定范围内有障碍物后有人则分别传递指令到各个执行构件:辅助控制器先向控制电门发出断开指令,开关断开,压路机停止振动;随后辅助控制器向挡位液压机械臂发出停车指令,当压路机为前进行驶时,挡位液压机械臂伸张为正常状态,压路机停止前进;当压路机为后退行驶时,挡位液压机械臂收缩为正常状态,压路机停止后退;压路机停止后毫米波雷达继续对前方进行扫描,当障碍清除后,毫米波雷达将当前路况信息传递到辅助控制器,辅助控制器经避障检测单元判断后,确认障碍已清除,向挡位液压机械臂发出前进或后退指令,机械臂恢复停止前状态,压路机继续行驶,向控制电门发出开启指令,控制电门闭合,压路机继续振动工作;
[0030]
四、压实参数实时采集与反馈处理
[0031]
辅助控制器通过实时采集的压路机的振动频率、振幅、速度、地表温度计算出碾压区域压实度的变化情况,压实度低于规定的压实阈值后,辅助控制器将减速指令传递到压路机挡位液压机械臂,压路机速度将减慢,以满足压实质量的要求;同时,车载数据箱通过无线信号将包括经纬度、振幅、振动频率、速度、地表温度的实时信号传递到远程信息收集端,对数据进行收集记录。
[0032]
所述压路机行驶及变道操作的具体过程是:
[0033]
1)压路机的前进、驻车、后退
[0034]
当压路机行进至指定位置起始区域a时,车载gps将实时位置信息传递到辅助控制器,辅助控制器接收到gps信号后,将储存的前进指令传递给挡位液压机械臂,控制挡位液压机械臂收缩,带动压路机挡位为前进挡,此时压路机向前行进;
[0035]
当压路机行进至车道末端时,车载gps将实时信息传递给辅助控制器,辅助控制器经工作状态判别单元判断后确认压路机此时位于车道末端,则将储存的断开指令给到控制电门,再将停车指令传递给挡位液压机械臂,挡位液压机械臂伸张至恢复原长,此时压路机缓慢驻车停止;然后辅助控制器将后退指令传递给挡位液压机械臂,挡位液压机械臂伸张,此时压路机挡位为后退挡位,此时压路机向后行驶;
[0036]
在行车过程中,通过车载gps能获得压路机的实时速度,当压路机工作的实时速度超过规范要求的最大或最小速度时,辅助控制器会将减速或加速指令传递给挡位液压机械臂,挡位液压机械臂会做出相应的收缩或伸张动作;
[0037]
2)压路机的变道
[0038]
gps传递的位置信息传递到辅助控制器,经过工作状态判别单元判断已达到起始区域a时,辅助控制器进行变道操作。
[0039]
所述第一过渡部件包括方向盘套、伸缩架,所述伸缩架包括多段依次嵌套的伸缩管,相邻伸缩管之间通过固定螺丝进行限位固定,所述方向盘套能紧密包裹在方向盘上,方向盘套的左右两部分之间通过伸缩架连接在一起,依据伸缩架的可伸缩性适应不同型号、不同方向盘直径的压路机;当伸缩架调整到位后,将左右两部分均套装在方向盘上,然后用扣件进行卡死,使方向盘和方向盘套紧密贴合固定在一起,位于方向盘套一侧的扣件上连接第一连接件,第一连接件的一端以铰接方式连接转向液压机械臂,转向液压机械臂下端
以铰接固定在机箱上,转向液压机械臂收缩,方向盘右转,压路机向右转向;转向液压机械臂伸张,方向盘左转,压路机向左转向;
[0040]
所述第二过渡部件包括挡位套,所述挡位套套在控制挡位处,挡位套套好后由第三扣件将挡位套与挡位紧密贴合,在朝向驾驶室舱底的第三扣件的一侧上固定安装第二连接件,第二连接件与挡位液压机械臂的伸出端铰接,同时挡位液压机械臂的固定端与底座铰接。
[0041]
本发明还保护一种外挂式压路机无人辅助驾驶系统的使用方法,该使用方法包括以下步骤:
[0042]
1)将机箱放入压路机驾驶室内,将转向液压机械臂通过第一过渡部件与方向盘固定,实现通过转向液压机械臂的伸缩而控制方向盘的转动;
[0043]
2)将挡位液压机械臂通过第二过渡部件与挡位固定,实现通过挡位液压机械臂的伸缩而改变挡位;
[0044]
3)控制电门并联在有人驾驶的压路机的振动控制电路的振动开关上,两个液压机械臂和控制电门与辅助控制器电连接;
[0045]
4)雷达、车载gps、温度传感器和振动传感器均与辅助控制器连接,车载gps将压路机的实时位置输入给辅助控制器,辅助控制器根据压路机位置的变化控制两个液压机械臂和控制电门,通过控制液压机械臂的伸张与收缩、控制电门的开闭,实现压路机的无人驾驶工作。
[0046]
与现有技术相比,本发明的有益效果是:
[0047]
1、本发明能够实现通过外加控制器与液压机械臂实现对普通压路机的改装使其拥有无人驾
[0048]
驶的功能,减轻了工程中驾驶员的工作负担,压实作业效率及质量可以得到有效的提升;现有的无人驾驶压路机控制器控制重心在压路机内部液压油路使压路机无人化,而不是采用驾驶室内对方向盘、挡位的机械连接使其拥有相同的功能,而且改装起来更为方便快捷。该油路的做法主要用于无人压路机厂商生产的思路方法,而本发明主要针对于工程上现有的普通压路机的无人化改装。
[0049]
2、本发明中,方向盘控制方面,方向盘套对方向盘的约束较为紧密,从而避免两者之间的滑动移位,而连接方向盘套的伸缩架使整体具有伸缩性,对于不同直径方向盘的压路机均可使用,具有很强的适用性。
[0050]
3、本发明通过外挂式系统来实现对压路机的无人化控制,相较于当前通过改装压路机底盘油路、电路的无人压路机,本发明适用范围更广,通过简单的外挂系统即可实现对普通压路机实现无人化控制。
[0051]
4、本发明在避障方面无需搭设单独的避障系统,辅助控制器也储存了相应的避障检测单元,由毫米波雷达将路况信息传递给辅助控制器,雷达感知路况信息后再控制机械臂做出的避障动作,辅助控制器传递避障指令到机械臂进而实现避障操作。
附图说明
[0052]
图1为本发明整体示意图。
[0053]
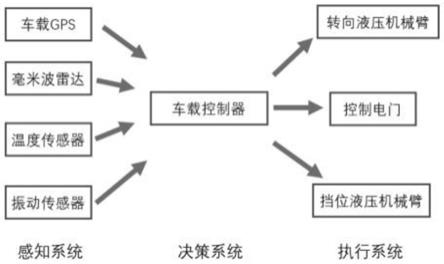
图2为本发明系统框图。
[0054]
由gps、毫米波雷达、温度传感器、振动传感器组成的感知系统对压路机位置信息、路况信息、工作状态进行识别并将实时信号传递到决策系统的辅助控制器,经过辅助控制器对信息的判别处理,识别出各种工况信息做出不同的判断指令,并将指令发送给执行系统的液压机械臂和控制电门,转向液压机械臂、挡位液压机械臂和控制电门相互配合实现压路机的自动化操作。
[0055]
图3为本发明转向模块示意图。
[0056]
图4为本发明行进模块示意图。
[0057]
图5为本发明工作路线流程图。
[0058]
在指定区域内,压路机的工作流程为由区域a的第1道出发,(图中实线表示压路机前进,虚线表示压路机后退)前进至区域b,随后后退至第1道区域a处,实现对第一道的碾压工作;随后进行变道操作,变道至区域a的第2道,继续进行相同的操作实现对第2道道的碾压工作后,在区域a处,再次变道至第3道,以此类推实现对工作区全区域的碾压工作。
[0059]
图6为本发明辅助控制器中工作状态判别单元的程序流程图。
[0060]
图7为本发明辅助控制器中避障检测单元的程序流程图。
[0061]
附图标记:
[0062]1‑
压路机,2
‑
前毫米波雷达,3
‑
后毫米波雷达,4
‑
车载gps,5
‑
车载数据箱,6
‑
振动传感器,7
‑
温度传感器,8
‑
方向盘套,9
‑
伸缩架,10
‑
固定螺丝,11
‑
转向液压机械臂,12
‑
机箱,13
‑
挡位套,14
‑
挡位液压机械臂,15
‑
底座,16
‑
辅助控制器,17
‑
第一连接件,18
‑
第一扣件,19
‑
第二扣件,20
‑
第二连接件,21
‑
第三扣件。
具体实施方式
[0063]
下面结合实施例及附图进一步解释本发明,但并不以此作为对本技术保护范围的限定。
[0064]
本发明一种外挂式压路机无人辅助驾驶系统,该辅助驾驶系统用于普通压路机上,对普通压路机进行改装,包括:包括车载gps4、毫米波雷达、辅助控制器16、车载数据箱5、液压机械臂、方向盘套8、伸缩架9、挡位套13、控制电门;在压路机上方安装车载gps,在压路机上增加gps导航,以判别压路机实时位置信息;在压路机前、后位置均装有毫米波雷达,以判别压路机车道实时路况信息;振动传感器6一方面安装至压路机振动轮轮轴上,另一方面与车载数据箱5相连;温度传感器7一方面吸附在压路机中部底端,温度传感器的输出端与车载数据箱5相连,同时车载gps 4也与车载数据箱相连;车载数据箱与辅助控制器16相连,辅助控制器能通过车载数据箱获取车载gps4、温度传感器7、振动传感器6采集的实时数据;
[0065]
驾驶室的方向盘通过第一过渡部件连接转向液压机械臂11,驾驶室的挡位处通过第二过渡部件连接挡位液压机械臂14,挡位液压机械臂14的固定端固定在挡位附近的底盘上,转向液压机械臂11的固定端与机箱12固定,所述机箱固定在方向盘下方附近空间内,保证转向液压机械臂能够控制方向盘的转动;所述机箱内装载车载数据箱5、辅助控制器16,辅助控制器同时与控制电门、转向液压机械臂、挡位液压机械臂、前后两个毫米波雷达电连接;
[0066]
所述控制电门并联在普通压路机的振动控制电路的振动开关上,振动开关处于常
开状态,在需要人为操作压路机时,控制电门常开,不工作,由振动开关控制振动控制电路的工作。振动控制电路的具体结构为普通压路机原有结构,不作为本技术改进的内容。
[0067]
通过车载gps、毫米波雷达的场景感知与位置感知,将场景和位置信息传递给辅助控制器,辅助控制器在确认位置和场景后将转向指令、前进后退指令、振动指令等不同指令传递给相应的执行系统(两个液压机械臂和控制电门),以实现对压路机前进、后退、变道、开振的操作。
[0068]
本发明在驾驶室方向盘、前进控制挡位处、振动开关分别增加转向液压机械臂、挡位液压机械臂和控制电门以实现对压路机的无人化操作。gps和毫米波雷达将压路机位置信息与路况信息传递给辅助控制器,当遇到不同的位置及路况时,将辅助控制器中存储的各种指令分别传递给转向液压机械臂、挡位液压机械臂和控制电门,使其做出响应,由两个液压机械臂和控制电门实现对压路机的无人化操作。
[0069]
本技术的核心创新点在于在辅助控制器的控制下,通过外接的转向液压机械臂控制压路机方向盘、通过外接挡位液压机械臂控制前进档位的变化,进而实现普通压路机的无人驾驶操作。由集成机箱固定在驾驶室中,再由辅助控制器直接控制两个液压机械臂模仿驾驶员的操作使压路机完成正常的工作。
[0070]
上述车载gps4、前毫米波雷达2、后毫米波雷达3、温度传感器7、振动传感器6组成的感知系统,由辅助控制器构成决策系统,由转向液压机械臂11、挡位液压机械臂14、控制电门组成的执行系统。
[0071]
本发明中辅助控制器能通过温度传感器获取地面温度状况信息、通过gps能够获得压路机车速,在压路机处于工作区域时,压路机的辅助控制器能自行判断出压路机车速、地面温度的状况信息,将控制压路机前进、后退、转向、振动等操作指令传递到执行系统,进而能及时地调整压路机的工作状态,而不用将数据远程传递给指挥中心,再对压路机的速度进行调整。
[0072]
所述第一过渡部件(参见图4)包括方向盘套8、伸缩架9,所述伸缩架9材质为铁质较硬材料,如铝合金、钛镁合金、不锈钢等,且为能伸缩的结构,包括多段依次嵌套的伸缩管,相邻伸缩管之间通过固定螺丝10进行限位固定,所述方向盘套8可以为橡胶材质,能紧密包裹在方向盘上,可以局部包裹,也可以全包裹,可以在直行状态下的方向盘左右对称的位置上套上方向盘套,方向盘套的左右两部分之间通过伸缩架连接在一起,依据伸缩架的可伸缩性可适应不同型号、不同方向盘直径的压路机。当伸缩架调整到位后,将左右两部分均套装在方向盘上,然后用扣件进行卡死,使方向盘和方向盘套紧密贴合固定在一起,位于方向盘套一侧的扣件上连接第一连接件17,第一连接件17为具有一定刚度、不易弯曲的硬质的部件,第一连接件17的一端以铰接方式连接转向液压机械臂11,转向液压机械臂11下端以铰接固定在机箱12上,转向液压机械臂11收缩,方向盘右转,压路机向右转向;转向液压机械臂伸张,方向盘左转,压路机向左转向。
[0073]
所述第二过渡部件(参见图3)包括挡位套13,所述挡位套13材质可以选择为橡胶材质,挡位套套在控制挡位处,挡位套套在挡位杆靠上的位置上,挡位套套好后由第三扣件21将挡位套13与挡位紧密贴合,在朝向驾驶室舱底的第三扣件21的一侧上固定安装第二连接件20,第二连接件20与挡位液压机械臂的伸出端铰接,同时挡位液压机械臂的固定端与底座15铰接,底座15可以与压路机驾驶舱底部固定,为挡位液压机械臂提供固定支撑点。
[0074]
所述扣件及连接件均为铁质材料制成,抗弯性能及传力性能好。
[0075]
本发明改装对象为普通压路机,压路机在工作区域工作时,经常是一道道的进行压实作业,相邻两道压路区域之间具有重复部分,一道向另一道转变过程即为变道操作,相邻碾压带重叠1/3~1/2轮宽。
[0076]
上述辅助驾驶系统的使用方法包括以下步骤:
[0077]
1)将机箱放入压路机驾驶室内,将方向盘套和伸缩架连接固定住方向盘,通过第一连接件将方向盘套与转向液压机械臂铰接,同时转向液压机械臂与机箱铰接,实现通过转向液压机械臂的伸缩而控制方向盘的转动;
[0078]
2)将挡位套连接至压路机挡位上端1/3处,将挡位套与挡位通过相应的扣件固定相连,挡位液压机械臂两端分别与第二连接件20、底座15铰接相连,实现通过挡位液压机械臂的伸缩而改变挡位;
[0079]
3)场地信息经过处理,车载gps将压路机的实时位置输入给辅助控制器,辅助控制器根据压路机位置的变化(前进或后退)将不同的指令(收缩或伸张)输入给两个液压机械臂,通过液压机械臂的伸张与收缩,方向盘与挡位相互配合实现压路机的前进后退、变道等操作。
[0080]
所述辅助控制器可以采用stm32单片机、ecu等实现,控制电门为电控开关,受辅助控制器的控制。
[0081]
所述辅助控制器内加载有工作状态判别单元和避障检测单元。
[0082]
所述工作状态判别单元的工作流程是:设指定区域内需要经过n道压实才能将整个区域压实一遍,令i=1,通过车载gps更新起始区域a和终止区域b内的第i道坐标,由起始区域a向终止区域b移动,执行前进操作,根据实时的车载gps信息实时判断是否到达终止区域b,若没有到达则继续返回前进操作,若到达区域b后,则停振、停车,再进行倒退操作;倒退过程中需实时判断是否到达起始区域a,若没有达到起始区域a,则继续返回倒退操作,若达到起始区域a后,则向右或左变道,工作状态为变道操作,此时i=i+1,判断此时的i是否大于指定区域内总压实道数n,若大于则结束,若不大于,则返回更新起始区域a、终止区域b的第i道到坐标。
[0083]
实施例1
[0084]
本实施例外挂式压路机无人辅助驾驶系统在普通压路机基础上进行改装,对方向盘的控制加装方向盘套、一个液压机械臂,方向盘套的左右两部分通过两个伸缩架连接。方向盘套采用橡胶材质从而使其与压路机方向盘紧密贴合,防止方向盘的滑动,所述伸缩架9材质为铁质,伸缩架与方向盘套固定连接,转向液压机械臂在方向盘右侧,第一扣件18通过螺栓将方向盘套的左部分与方向盘紧密贴合,第二扣件19通过螺栓一方面与第一连接件17固定,另一方面与方向盘套8的有部分固定,第一连接件17同时以铰接方式连接转向液压机械臂11,转向液压机械臂下部与机箱铰接固定,转向液压机械臂与辅助控制器电连接;
[0085]
挡位控制加装挡位套和挡位液压机械臂,所述挡位套套至压路机挡位前1/3处,挡位液压机械臂上端与第二连接件铰接,下端与底座15铰接,挡位液压机械臂也与辅助控制器电相连,由辅助控制器控制挡位液压机械臂伸缩;机箱总体是放置在驾驶舱座椅的部位,并固定,离挡位液压机械臂较远无法直接固定在机箱上,在机箱上向外延伸一个底座,从而连接挡位机械臂。
[0086]
振动控制在原有振动开关位置处加装控制电门,实现由控制电门控制压路机的振动操作,控制电门也与辅助控制器电连接,由辅助控制器控制控制电门的闭合断开,在压路机振动控制电路的振动开关所在位置并联控制电门,振动开关平常处于常开状态;
[0087]
加装振动传感器6和温度传感器,振动传感器一方面安装至压路机振动轮轮轴上,另一方面与车载数据箱5相连;温度传感器7一方面吸附在压路机中部底端,温度传感器的输出端与车载数据箱5相连;压路机位置信息与路况信息分别由gps、毫米波雷达确定,gps、毫米波雷达也与辅助控制器相连将位置、路况信息传递到辅助控制器中,由辅助控制器针对不同位置发出相应的指令。
[0088]
辅助控制器内存储有如下指令:
[0089]
前进指令:控制挡位液压机械臂14收缩固定的前进角度,
[0090]
停车指令:控制挡位液压机械臂14伸张或收缩至恢复控制挡位液压机械臂的原长,
[0091]
后退指令:控制挡位液压机械臂伸张固定的后退角度,
[0092]
减速指令:实时速度超过规范要求的最大速度,控制挡位液压机械臂在固定的前进角度或后退角度基础上再伸张或收缩一段距离,
[0093]
加速指令:实时速度超过规范要求的最小速度,控制挡位液压机械臂在固定的前进角度或后退角度基础上再收缩或伸张一段距离,
[0094]
左转指令:控制转向液压机械臂伸张固定的左转角度,压路机向左转弯;
[0095]
右转指令:控制转向液压机械臂伸张固定的右转角度,压路机向右转弯;
[0096]
机身回正指令:控制转向液压机械臂在固定左转或右转角度的基础上再收缩一段距离,使压路机机身回正;
[0097]
开启指令:控制控制电门开启,
[0098]
断开指令:当行进至压实区域边缘压路机由行进转为停止前,辅助控制器控制控制电门关闭。
[0099]
上述的固定的左转角度、固定的右转角度、固定的后退角度、固定的前进角度及在此基础上收缩或伸张的距离均可根据车速等实际情况根据实际试验确定。
[0100]
变道操作,设定变道固定收缩角度和需要转向的距离,根据这两个值获得需要变道操作时长,辅助控制器依次向方向盘及挡位处的液压机械臂发出控制指令,首先向挡位机械臂发出前进指令,再使转向液压机械臂伸张,保持向即将变道的道路方向倾斜的趋势一段时间,再使转向液压机械臂收缩,保持压路机倾斜向左(右)前方行驶,最后使转向液压机械臂伸张至原长,将压路机车身回正,压路机完成变道操作。压路机变道操作过程中经历的倾斜、倾斜前行、车身回正过程的时长即为变道操作时长。例如:首先向挡位机械臂发出前进指令,1s后(与液压杆收缩角度、变道距离、两车道重复碾压距离等有关),辅助控制器向转向液压机械臂发出指令,转向液压机械臂伸张,压路机向左(右)转弯,此时压路机转为左(右)侧车道,但车身为向左(右)倾斜;2s后,辅助控制器向方向盘处液压机械臂发出收缩指令,压路机倾斜向左(右)前方行驶;1s后辅助控制器向方向盘处液压机械臂发出指令,机械臂伸张至原长,将压路机车身回正,压路机完成变道操作。先收缩(2s)后伸张(1s)为了让压路机实现变道且变道后相邻两道保持平行,以保证有序压实,最后机械臂伸张至原长是为了压路机后续工作时,方向盘不偏移,直线行驶。所述变道操作时长受到压路机变道距
离、相邻两道重复距离影响,应根据现场工况的不同做出调整。
[0101]
图5为本发明中压路机的工作路线流程示意图,区域a和区域b分别为需要压实的指定区域的起始区域和终止区域,在指定区域内,压路机的工作流程为由起始区域a的第1道出发,(图中实线表示压路机前进,虚线表示压路机后退)前进至终止区域b,随后后退至第1道起始区域a处,实现对第一道的碾压工作;随后进行变道操作,变道至起始区域a的第2道,继续进行相同的操作实现对第2道道路的碾压工作后,在起始区域a处,再次变道至第3道,以此类推实现对工作区全区域的碾压工作。
[0102]
图6为本发明工作状态判别单元的工作流程是:设指定区域内需要经过n道压实才能将整个区域压实一遍,令i=1,通过车载gps更新起始区域a和终止区域b内的第i道坐标,由起始区域a向终止区域b移动,执行前进操作,根据实时的车载gps信息实时判断是否到达终止区域b,若没有到达则继续返回前进操作,若到达区域b后,则停振、停车,再进行倒退操作;倒退过程中需实时判断是否到达起始区域a,若没有达到起始区域a,则继续返回倒退操作,若达到起始区域a后,则向右或左变道,工作状态为变道操作,此时i=i+1,判断此时的i是否大于指定区域内总压实道数n,若大于则结束,若不大于,则返回更新起始区域a、终止区域b的第i道到坐标。
[0103]
本发明外挂式压路机无人辅助驾驶系统具体的工作过程是:
[0104]
一、压路机行驶及变道操作
[0105]
转向液压机械臂11收缩,方向盘右转,压路机向右转向;转向液压机械臂伸张,方向盘左转,压路机向左转向;
[0106]
当挡位液压机械臂正常情况下(即未收缩也未伸张)挡位处于驻车状态,压路机既不前进也不后退;当挡位液压机械臂收缩时,挡位处于前进档状态,此时压路机向前行驶;当挡位液压机械臂伸张时,挡位处于后退档状态,此时压路机向后行驶。
[0107]
1)压路机的前进、驻车、后退
[0108]
当压路机行进至指定位置起始区域a时,车载gps将实时位置信息传递到辅助控制器,辅助控制器接收到gps信号后,将储存的前进指令传递给挡位液压机械臂,控制挡位液压机械臂14收缩,带动压路机挡位为前进挡,此时压路机向前行进;
[0109]
当压路机行进至车道末端时,车载gps将实时信息传递给辅助控制器,辅助控制器经工作状态判别单元判断后确认压路机此时位于车道末端即到达终止区域b内,则将储存的断开指令给到控制电门,再将停车指令传递给挡位液压机械臂,挡位液压机械臂伸张至恢复原长,此时压路机缓慢驻车停止(发动机仍处于工作状态,但不继续往前走);区域a和区域b的设定面积能够让压路机在此区域内停止。然后辅助控制器将后退指令传递给挡位液压机械臂,挡位液压机械臂伸张,此时压路机挡位为后退挡位,此时压路机向后行驶。
[0110]
在行车过程中,通过车载gps能获得压路机的实时速度,当压路机工作的车速(即实时速度)超过规范要求的最大(或最小)速度时,辅助控制器会将存储的减速(加速)指令传递给挡位液压机械臂,挡位液压机械臂会做出相应的收缩(伸张)。
[0111]
2)压路机的变道
[0112]
gps传递的位置信息传递到辅助控制器,经过工作状态判别单元判断已达到起始区域a时,辅助控制器进行变道操作(左变道操作),设变道固定收缩角度,设定转向距离,根据这两个获得保持时间,以向左变道为例,辅助控制器依次向方向盘及挡位处液压机械臂
发出指令,首先向挡位机械臂发出指令,挡位机械臂收缩,挡位为前进挡,压路机向前工作,1s后,辅助控制器向方向盘处液压机械臂发出指令,液压机械臂伸张,压路机向左转弯;2s后,辅助控制器向方向盘处液压机械臂发出收缩指令,压路机机身回正;1s后辅助控制器向方向盘处液压机械臂发出指令,机械臂伸张至原长,压路机完成变道操作。
[0113]
通过设定转向液压机械臂的固定收缩的角度,可以用时间来控制压路机转向行进的长度。
[0114]
二、压路机起振
[0115]
将控制电门连接到压路机振动控制电路中,以此代替压路机振动按钮对振动开启的控制,在压路机行进至工作区域后,辅助控制器传递开启指令给控制电门,控制电门的开关闭合,压路机开始振动压实工作;当行进至压实区域边缘压路机由行进转为停止前,辅助控制器传递断开指令给电门控制开关,控制开关断开,以防止压路机停车后,振动依然开始对场地局部地区产生破坏。
[0116]
三、压路机机械避障
[0117]
压路机前后分别装有两个毫米波雷达2、3,以一定频率对压路机前后进行扫描操作,在压路机工作过程中,当毫米波雷达扫描出规定范围内有人或障碍物后,将信息传递到辅助控制器,辅助控制器经避障检测单元判断出在规定范围内有障碍物后有人则(避障检测单元的工作过程是:开始,更新雷达信息,判断是否有障碍物,如果没有继续返回更新雷达信息,如果有障碍物,则停振、停车,计时器计时,再返回更新雷达信息。计时器每达到设定的时间间隔后开始下一轮的避障检测)分别传递指令到各个执行构件:辅助控制器先向控制电门发出断开指令,开关断开,压路机停止振动;随后辅助控制器向挡位液压机械臂发出停车指令,当压路机为前进行驶时,挡位液压机械臂伸张为正常状态,压路机停止前进;当压路机为后退行驶时,挡位液压机械臂收缩为正常状态,压路机停止后退。压路机停止后毫米波雷达继续对前方进行扫描,当障碍清除后,毫米波雷达将当前路况信息传递到辅助控制器,辅助控制器经避障检测单元判断后,确认障碍已清除,向挡位液压机械臂发出前进或后退指令,机械臂恢复停止前状态,压路机继续行驶,向控制电门发出开启指令,控制电门闭合,压路机继续振动工作。
[0118]
四、压实参数实时采集与反馈处理
[0119]
压路机压实参数收集模块包括振动传感器、车载gps 4、温度传感器7,振动传感器6一端安装至压路机振动轮轮轴上一端与车载数据箱5相连,采集压路机的振动频率、振幅;车载gps一端吸附在压路机车顶,一端与车载数据箱相连,采集压路机的位置(经纬度)及速度;温度传感器7一端吸附在压路机中部底端,一端与车载数据箱相连,采集路面的地表温度。
[0120]
车载数据箱连接辅助控制器,辅助控制器通过实时采集的压路机的振动频率、振幅、速度、地表温度计算出碾压区域压实度的变化情况,压实度低于规定的压实阈值(此阈值根据工程要求或规范确定,例如土路基填方压实路床顶面以下深度不大于80cm时,城市快速路压实度应不小于95%,对于不同工况,压实度标准不同,不限于例子中所述)后,辅助控制器,将减速指令传递到压路机挡位液压机械臂,压路机速度将减慢,以满足压实质量的要求。同时,车载数据箱通过无线信号将经纬度、振幅、振动频率、速度、地表温度等实时信号传递到远程信息收集端,对数据进行收集记录。
[0121]
本发明中各个传感器的设置既能实时采集压路机的当前环境信息,又能将采集的信息作为操作反馈(压实度的大小来反馈压实速度是否减慢或加快),控制压实过程,实现压实过程的无人驾驶、自主控制压实。
[0122]
本发明未述及之处适用于现有技术。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1