一种半自动波形梁护栏板安装机及其工作方法与流程
1.本技术涉及护栏安装设备的领域,尤其是涉及一种半自动波形梁护栏板安装机及其工作方法。
背景技术:
2.目前波形防护栏为一种公路防撞设施,由两块波形梁钢护栏板及两者之间固定夹放的两支护栏立柱构成,其主要是为了防止失控车辆冲出道路,并且根据公路等级不同而采用不同的规格,目前,波形梁护栏板的安装还是采用传统人工搬运护栏板到达立柱位置然后进行安装的方式,安装时需要至少两名工作人员配合进行搬运安装,这种安装方式不能进行连续作业,整体工作效率低。
3.现有的专利公告号为cn201810735592.x的中国专利,提出了一种半自动波形梁护栏板安装机,包括行走机构;且在行走机构前端固定有牵引杆;行走机构的底板分为两部分,第一部分为波形梁护栏板容纳区,第二部分为波形梁护栏板传送区;在波形梁护栏板容纳区内固定有液压油缸,在液压油缸输出轴上固定有支撑板,在支撑板上方,设置有顶盖,在顶盖下底面安装有轨道,在轨道上连接有挂钩;在波形梁护栏板传送区固定有传送带,与传送带衔接有活动支架。
4.针对上述中的相关技术,发明人认为挂钩在挂设护栏板过程中,需要挂钩对准护栏板上的挂孔,而挂钩与护栏板分开时也需要人工将挂钩与护栏板分离,存在有增大工作人员劳动强度的缺陷。
技术实现要素:
5.为了改善挂钩挂设护栏板麻烦的问题,本技术提供一种半自动波形梁护栏板安装机及其工作方法。
6.本技术提供的一种半自动波形梁护栏板安装机采用如下的技术方案:一种半自动波形梁护栏板安装机,包括投放车、安装于所述投放车内的存放机构以及用于传送护栏板的传送机构,所述存放机构包括升降设置于所述投放车内的存放板、滑动连接于所述投放车内的支架以及升降设置于所述支架上的提升板,所述投放车设置有驱动所述支架运动的动力组件,所述提升板安装有多个提升块,所述提升块设置有用于吸附护栏板的电磁铁;所述提升板转动连接有转动杆,所述转动杆升降设置有提升杆,所述提升杆远离于所述转动杆的一端固定连接有支撑块,所述提升板设置有驱动所述转动杆转动的驱动组件。
7.通过采用上述技术方案,通过控制提升板下降后,利用电磁铁将护栏板吸附,将护栏板提升起来后,通过驱动组件控制提升杆以及转动杆转动,支撑块转动至护栏板下方,在电磁铁的吸附以及支撑块的支撑作用下,确保对护栏板的支撑稳定效果,在动力组件的作用下,支架被驱动朝向传送机构运动,电磁铁释放护栏板且支撑块转动至与远离护栏板的位置,完成对护栏板的支撑效果。
8.可选的,所述驱动组件包括齿轮以及齿条,所述齿轮与所述转动杆同轴固定,所述齿条与所述齿轮啮合连接,所述齿条与所述提升板滑动连接,所述提升板设置有驱动所述齿条往复运动的动力件。
9.通过采用上述技术方案,在动力件的作用下,齿条发生运动,齿轮被齿条驱动发生转动,从而实现对转动杆的驱动效果,支撑块跟随转动杆转动至与护栏板底部抵接。
10.可选的,所述动力件设置有第一气缸,所述第一气缸与所述提升板固定连接,所述第一气缸输出端与所述齿条的端部固定连接。
11.通过采用上述技术方案,第一气缸驱动齿条运动,齿条被驱动发生运动,便于对齿条进行驱动。
12.可选的,所述转动杆设置有用于所述提升杆滑动的滑孔,所述转动杆于所述滑孔开口处转动连接有螺帽,所述螺帽螺纹连接有螺杆,所述螺杆滑动连接于所述滑孔内,所述螺杆与所述提升杆固定连接,所述转动杆设置有用于限制所述提升杆转动的限位件。
13.可选的,所述限位件设置为限位块,所述限位块与所述滑孔内壁固定连接,所述螺杆外壁设置有限位槽,所述限位块滑动连接于所述限位槽内,所述限位槽长度方向沿着所述螺杆轴线方向设置,所述限位槽的两端为闭合设置。
14.通过采用上述技术方案,驱动螺帽转动,螺杆跟随一起运动,在限位块与限位槽之间相对运动的作用下,螺杆带动提升杆在转动杆的滑孔内运动,进而实现对支撑块位置的调节效果。
15.可选的,所述转动杆于开口处设置有转动槽,所述螺帽固定连接有两个转动块,两个所述转动块的竖直段分别与所述螺帽两侧固定连接,所述转动块的水平段转动连接于所述转动槽开口大的位置。
16.通过采用上述技术方案,转动块朝向转动槽开口处的运动被限制,转动块只能在转动槽内转动,进而实现螺帽与转动杆之间的转动效果。
17.可选的,所述存放板两侧均固定连接有调节滑块,所述投放车转动连接有竖直设置的调节丝杆,所述调节丝杆与任一个所述调节滑块螺旋配合,所述投放车固定连接有调节滑杆,另一个所述调节滑块套设滑移于所述调节滑杆外,所述投放车设置有用于实现所述调节丝杆间歇转动的间歇装置。
18.通过采用上述技术方案,通过间歇装置,调节丝杆发生间隙运动,调节滑块在调节滑杆上运动,进而实现对存放板的驱动效果,存放板运动的距离等于护栏板厚度尺寸,进而实现与护栏板取放过程匹配,大大实现护栏板运输过程中的自动化。
19.可选的,所述间歇装置包括伺服电机、转动盘以及传动盘,所述伺服电机输出端与所述转动盘同轴固定,所述伺服电机与所述投放车固定连接,所述传动盘与所述调节丝杆同轴固定,所述转动盘与所述投放车转动连接,所述转动盘端面固定连接有凸块,所述传动盘设置有多个用于所述凸块滑入的传动槽,所述转动盘与所述传动盘之间设置有用于确保所述凸块滑入至下一个所述传动槽内的传动组件。
20.可选的,所述传动组件包括传动滑板以及转动滑板,所述转动滑板与所述转动盘端面固定连接,所述传动滑板位于相邻两个所述传动槽之间,所述转动滑板截面圆弧半径等于所述传动滑板截面圆弧半径,且所述转动滑板为外凸设置,所述传动滑板为内凹设置,所述转动滑板与所述传动滑板的侧壁贴合滑动。
21.通过采用上述技术方案,当凸块从传动槽滑出后,转动滑板与传动滑板贴合,避免传动滑板由于惯性作用继续运动,确保凸块转动至下一个传动槽内,当转动盘转动一圈时,传动盘转动四分之一圈。
22.本技术还提供的一种半自动波形梁护栏板安装机的工作方法采用如下的技术方案:一种半自动波形梁护栏板安装机的工作方法,包括如下步骤,s1、准备工作,将护栏板依次堆积在存放板上;s2、调节支撑块位置,控制电磁铁底面与支撑块顶面之间距离等于护栏板厚度尺寸;s2、电磁铁吸附,控制提升板朝下运动,电磁铁将防护板吸附起来;s3、支撑护栏板,转动杆带动支撑块转动至护栏板底壁,实现对护栏板进行支撑;s4、下料,控制支架朝向传送机构方向运动,护栏板运动至传送机构位置,将护栏板放置于传送机构上。
23.通过采用上述技术方案,将护栏板依次堆积在存放板上,驱动螺帽转动,螺杆跟随一起运动,在限位块与限位槽之间相对运动的作用下,螺杆带动提升杆在转动杆的滑孔内运动,进而实现对支撑块位置的调节效果;第一油缸控制提升板朝下运动,电磁铁对护栏板进行吸附,第一油缸抬升提升板,第一气缸驱动齿条运动,齿轮带动转动杆转动,支撑块转动至护栏板下方,完成对护栏板的支撑效果;动力电机驱动动力丝杆转动且带动提升板运动至传送带上方,护栏板将护栏板放置在传送带上,完成对护栏板的输送;伺服电机控制转动盘转动,凸块带动传动盘转动,调节丝杆跟随传动盘一起转动,转动盘转动一圈,传动盘转动四分之一圈,调节丝杆带动调节滑块在调节滑杆上运动,且存放板朝向上运动的距离等于护栏板的厚度尺寸,便于对下一个护栏板进行搬运。
24.综上所述,本技术包括以下至少一种有益技术效果:1.通过控制提升板下降后,利用电磁铁将护栏板吸附,将护栏板提升起来后,通过驱动组件控制提升杆以及转动杆转动,支撑块转动至护栏板下方,在电磁铁的吸附以及支撑块的支撑作用下,确保对护栏板的支撑稳定效果,在动力组件的作用下,支架被驱动朝向传送机构运动,电磁铁释放护栏板且支撑块转动至与远离护栏板的位置,完成对护栏板的支撑效果;2.伺服电机驱动转动盘转动,凸块推动传动盘转动,在传动滑板以及转动滑板的配合作用下,转动盘转动一圈,传动盘转动四分之一圈,调节丝杆转动四分之一圈,进而存放板朝上运动一个护栏板厚度的距离,便于对下一个护栏板的运输。
附图说明
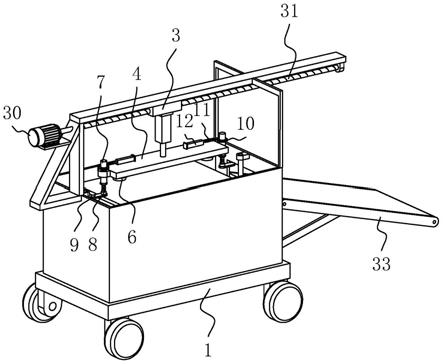
25.图1是本技术实施例一的整体结构示意图;图2是本技术实施例一的剖视示意图;图3是图2中a处的放大示意图;图4是本技术实施例一中存放板、调节丝杆、调节滑杆以及间歇装置的示意图;图5是本技术实施例二中的工艺流程图。
26.附图标记:1、投放车;2、存放板;3、支架;4、提升板;5、提升块;6、电磁铁;7、转动
杆;8、提升杆;9、支撑块;10、齿轮;11、齿条;12、第一气缸;13、滑孔;14、螺帽;15、螺杆;16、限位块;17、限位槽;18、转动块;19、转动槽;20、调节滑块;21、调节丝杆;22、调节滑杆;23、伺服电机;24、转动盘;25、传动盘;26、凸块;27、传动槽;28、转动滑板;29、传动滑板;30、动力电机;31、动力丝杆;32、动力滑块;33、传送带。
具体实施方式
27.以下结合附图1-5对本技术作进一步详细说明。
28.实施例一本技术实施例公开一种半自动波形梁护栏板安装机及其工作方法。参照图1,一种半自动波形梁护栏板安装机及其工作方法包括投放车1、安装于投放车1内的存放机构以及用于传送护栏板的传送机构,传送机构也位于投放车1内,传送机构采用与投放车1传动连接的传送带33,传送带33为倾斜设置,且传送带33通过与投放车1转动连接的主动辊以及从动辊进行驱动,当护栏板被运送至传送带33上后,传送带33将护栏板运送至待加工的位置。
29.参照图1和图2,存放机构包括升降设置于投放车1内的存放板2、滑动连接于投放车1内的支架3以及升降设置于支架3上的提升板4,存放板2上用于放置护栏板且护栏板沿着竖直方向均匀叠放在存放板2上,存放板2沿着竖直方向运动,支架3沿着朝向传送带33方向运动,提升板4沿着竖直方向往复运动,支架3固定连接有第一油缸,第一油缸的输出端与提升板4固定连接。
30.提升块5设置有两个,两个提升块5的处于同一直线上且分别位于提升板4的两端,提升块5固定连接有用于吸附护栏板的电磁铁6,护栏板多采用铁制,当第一油缸驱动提升板4朝下运动,提升板4带动电磁铁6运动至与护栏板的上表面位置后,三个电磁铁6与护栏板通过磁性吸附在一起,第一油缸驱动提升板4朝上运动,护栏板运动至与相邻的护栏板分离,完成对护栏板的抬升作用。
31.参照图1和图2,为了保证对护栏板支撑稳定性,提升板4转动连接有转动杆7,转动杆7升降设置有提升杆8,提升杆8远离于转动杆7的一端固定连接有支撑块9,且提升板4与支撑板转动连接的位置位于支撑块9的端部,提升板4设置有驱动转动杆7转动的驱动组件,驱动组件包括齿轮10以及齿条11,齿轮10与转动杆7同轴固定连接且齿轮10位于提升板4的上侧面,齿条11与齿轮10啮合连接,齿条11与提升板4上表面滑动连接,提升板4设置有驱动齿条11往复运动的动力件,动力件设置为第一气缸12,第一气缸12与提升板4固定连接,第一气缸12输出端与齿条11的端部固定连接,齿条11在往复运动过程中驱动齿轮10转动。
32.第一气缸12驱动齿条11朝向远离齿轮10方向运动,齿轮10被驱动发生顺时针转动,转动杆7以及提升杆8一起发生转动,支撑块9朝向电磁铁6下方转动,且支撑块9上表面到电磁铁6下表面之间的距离等于护栏板的厚度尺寸,当支撑块9转动至电磁铁6下方时,实现支撑块9对护栏的支撑效果;支撑块9从初始位置转动至护栏板下方过程中转动90
°
,即齿轮10转动四分之一圈,在支撑块9支撑以及电磁铁6吸附的作用下,确保对护栏板的支撑效果。
33.投放车1设置有驱动支架3运动的动力组件,动力组件包括动力丝杆31、动力电机30以及动力滑块32,投放车1顶壁开设有动力滑槽,动力滑槽长度方向沿着朝向传送带33方向设置,动力滑块32滑动连接于动力滑槽内,动力滑块32与支架3固定连接,动力丝杆31与
动力滑块32螺旋配合,动力电机30与投放车1固定连接,动力电机30输出端与动力丝杆31的一端固定连接,动力丝杆31的两端分别与动力滑槽两端内壁转动连接;当护栏板被吸附固定后,动力电机30驱动动力丝杆31转动,动力丝杆31带动动力滑块32运动,动力滑块32带动支架3沿着动力滑槽长度方向运动,即支架3被驱动朝向传送带33方向运动,待护栏板运动至传送带33的一端后,第一气缸12驱动齿条11朝向反方向运动,齿轮10反向转动,支撑块9转动至与护栏板分离的位置,电磁铁6断开与护栏板连接,护栏板掉落至传送带33上被运送至待安装位置。
34.参照图2和图3,为了便于运输不同厚度尺寸的护栏板,转动杆7端部设置有用于提升杆8滑动的滑孔13,提升杆8于滑孔13处转动连接有螺帽14,螺帽14固定连接有两个转动块18,转动杆7于开口处设置有转动槽19,转动块18设置为l状,转动槽19内壁截面设置为t字型,转动块18的竖直段与螺帽14固定连接,两个转动块18分别位于螺帽14的两侧,转动块18的水平段位于转动槽19开口大的位置,转动块18朝向远离转动槽19开口处的运动被限制,转动块18在转动槽19内转动,实现螺帽14与转动杆7之间的转动连接效果。
35.螺帽14螺纹连接有螺杆15,螺杆15滑动连接于滑孔13内,螺杆15位于滑孔13外的一端与提升杆8固定连接,转动杆7设置有用于限制提升杆8转动的限位件,限位件设置为限位块16,限位块16与滑孔13内壁固定连接,螺杆15外壁设置有限位槽17,限位块16滑动连接于限位槽17内,限位槽17的长度方向沿着螺杆15轴线方向设置,限位槽17的两端为闭合设置;当螺帽14转动时,螺杆15跟随螺帽14一起运动,在限位块16以及限位槽17的限位作用下,螺杆15的转动被限制,螺帽14驱动螺杆15沿着滑孔13的轴线方向运动,进而实现对支撑块9与电磁铁6之间距离的调节效果,完成对不同厚度尺寸护栏板匹配的效果。
36.参照图2和图4,当一个护栏板被输送完成后,为了实现存放板2朝上运动一个护栏板厚度尺寸的距离,存放板2的两侧均固定连接有调节滑块20,投放车1转动连接有竖直设置的调节丝杆21,调节丝杆21的两端均与投放车1转动连接,调节丝杆21与任一个调节滑块20螺旋配合,投放车1固定连接有调节滑杆22,调节滑杆22为竖直设置,且调节滑杆22与调节丝杆21为平行设置,调节滑杆22与调节丝杆21的长度尺寸相同,另一个调节滑块20套设滑移与调节滑杆22外,投放车1设置有用于实现调节丝杆21间歇转动的间歇装置。
37.间歇装置包括伺服电机23、转动盘24以及传动盘25,伺服电机23与投放车1固定连接,伺服电机23输出端与转动盘24同轴固定,传动盘25与调节丝杆21同轴固定连接,转动盘24与投放车1转动连接,转动盘24的轴线方向与传动盘25的轴线方向为平行设置,转动盘24端面固定连接有凸块26,传动盘25设置有四个用于凸块26滑入的传动槽27,传动槽27朝向转动盘24的一端为开口设置,当凸块26运动至传动槽27开口处时,凸块26带动传动盘25中心的距离等于传动槽27开口处到传动盘25中心的距离,确保凸块26转动至传动槽27内。
38.凸块26到传动盘25中心的距离大于凸块26到传动槽27底端的距离,凸块26推动传动盘25转动的同时,凸块26朝向传动槽27底壁运动,凸块26朝向传动槽27内运动后朝向远离传动槽27运动,凸块26从传动槽27内滑出,为了确保凸块26滑动至另一个传动槽27内,转动盘24与传动盘25之间设置有用于确保凸块26滑入至下一个传动槽27内的传动组件。
39.传动组件包括传动滑板29以及转动滑板28,转动滑板28与转动盘24端面固定连接,转动滑板28截面圆弧半径等于传动滑板29截面圆弧半径,且转动滑板28截面圆周穿过凸块26的中心,传动滑板29位于相邻两个传动槽27之间,转动滑板28为外凸设置,传动滑板
29为内凹设置,转动滑板28与传动滑板29的侧壁贴合滑动,当凸块26从传动槽27滑出后,转动滑板28与传动滑板29贴合,避免传动滑板29由于惯性作用继续运动,确保凸块26转动至下一个传动槽27内,当转动盘24转动一圈时,传动盘25转动四分之一圈,此时调节丝杆21跟随传动盘25转动,调节丝杆21带动调节滑块20在竖直方向运动的距离等于护栏板的厚度尺寸,进而保证存放板2朝上运动至一个护栏板的厚度尺寸,确保电磁铁6对下一个护栏板的吸附作用。
40.本技术实施例一种半自动波形梁护栏板安装机及其工作方法的实施原理为:将护栏板依次堆积在存放板2上,驱动螺帽14转动,螺杆15跟随一起运动,在限位块16与限位槽17之间相对运动的作用下,螺杆15带动提升杆8在转动杆7的滑孔13内运动,进而实现对支撑块9位置的调节效果;第一油缸控制提升板4朝下运动,电磁铁6对护栏板进行吸附,第一油缸抬升提升板4,第一气缸12驱动齿条11运动,齿轮10带动转动杆7转动,支撑块9转动至护栏板下方,完成对护栏板的支撑效果;动力电机30驱动动力丝杆31转动且带动提升板4运动至传送带33上方,护栏板将护栏板放置在传送带33上,完成对护栏板的输送;伺服电机23控制转动盘24转动,凸块26带动传动盘25转动,调节丝杆21跟随传动盘25一起转动,转动盘24转动一圈,传动盘25转动四分之一圈,调节丝杆21带动调节滑块20在调节滑杆22上运动,且存放板2朝向上运动的距离等于护栏板的厚度尺寸,便于对下一个护栏板进行搬运。
41.实施例二本技术实施例公开一种半自动波形梁护栏板安装机的工作方法。参照图1,一种半自动波形梁护栏板安装机的工作方法包括如下步骤,s1、准备工作,将护栏板依次堆积在存放板2上;s2、调节支撑块9位置,驱动螺帽14转动,螺杆15跟随一起运动,在限位块16与限位槽17之间相对运动的作用下,螺杆15带动提升杆8在转动杆7的滑孔13内运动,进而实现对支撑块9位置的调节效果,控制电磁铁6底面与支撑块9顶面之间距离等于护栏板厚度尺寸;s3、电磁铁6吸附,第一油缸控制提升板4朝下运动,电磁铁6运动至与护栏板上表面抵接的位置,电磁铁6将防护板吸附起来,且第一油缸对提升板4进行提升;s4、支撑护栏板,第一气缸12驱动齿条11滑动,齿轮10被驱动发生转动,齿轮10带动转动杆7转动,转动杆7以及提升杆8一起转动,支撑块9跟随转动至护栏板底面位置,转动杆7带动支撑块9转动至护栏板底壁,实现对护栏板进行支撑,在提升板4以及支撑块9的夹持作用下,确保对护栏板的支撑稳固效果;s5、下料,动力电机30驱动动力丝杆31转动,动力滑块32在动力滑槽内运动,支架3跟随动力滑块32一起运动,控制支架3朝向传送带33方向运动,护栏板运动至传送带33位置,第一气缸12控制齿条11朝向反方向转动,转动杆7带动支撑块9转动至偏离护栏板的位置,电磁铁6释放护栏板,将护栏板放置于传送带33上,传送带33将护栏板运输至安装位置,动力电机30反转,将支架3输送至存放板2上,同时伺服电机23驱动转动盘24转动,凸块26推动传动盘25转动,在传动滑板29以及转动滑板28的配合作用下,转动盘24转动一圈,传动盘25转动四分之一圈,调节丝杆21转动四分之一圈,进而存放板2朝上运动一个护栏板厚度的距离,便于对下一个护栏板的运输。
42.以上均为本技术的较佳实施例,并非依此限制本技术的保护范围,故:凡依本技术
的结构、形状、原理所做的等效变化,均应涵盖于本技术的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1