一种墙面清洗车的作业方法与流程
1.本发明属于墙面清洗车技术领域,具体涉及一种墙面清洗车的作业方法。
背景技术:
2.目前国内的隧道的清洗机械化程度较低,有的地方还依赖人工清洗,效率低且存在安全隐患。目前少数厂家生产的墙面清洗车也仅为洒水车改装而来,未针对隧道的实际情况进行设计,在清洗范围,清洗效率及清洗效果上均未达到客户需求。
技术实现要素:
3.为了克服上述现有技术的不足之处,本发明提供一种墙面清洗车的作业方法,依托双刷墙面清洗车较好的适应了隧道内的实际工况。
4.本发明是通过如下技术方案实现的:一种墙面清洗车的作业方法,包括作业行走方法和清洗方法;作业行走方法通过与底盘匹配的行走系统总成来实现,行走系统总成包括行走泵、分动箱、前传动轴、变速箱、行走马达、后传动轴、后车桥和后轮胎;作业行走方法包括如下步骤:在进入作业模式时,操作行走模式切换按钮,通过分动箱使车辆从底盘机械行走进入液压行走状态,此时行走泵和行走马达进入待机状态,行走动力从变速箱通过前传动轴导入分动箱,带动行走泵旋转;开始行走时,通过驾驶室内旋钮调节,行走泵排量增大,带动行走马达旋转,行走马达通过分动箱带动后传动轴旋转,然后通过后车桥变速,最终带动后轮胎旋转实现车辆静液压行走;本技术依托具有前刷和后刷的双刷墙面清洗车,清洗方法包括单刷前侧清洗、单刷后侧清洗、双刷同侧清洗和双刷异侧清洗;在进入清洗模式时,需打开车身平衡系统,将车身稳定装置打开,提供单侧偏载重心支撑,保持整车作业稳定性。
5.所述单刷前侧清洗包括如下步骤:将墙面清洗车停在隧道适当位置;控制稳定器油缸伸出至适当位置,使稳定器油缸顶靠在清洗一侧的前后弹簧钢板上,将底盘大梁与前后桥之间的浮动连接转变为刚性连接;控制前支撑伸缩油缸同步向下伸出使前支撑轮接触支撑在地面上;控制前臂架举升油缸使一节臂上升至适当高度;控制前臂架伸缩油缸使二节臂伸出至适当位置;控制前臂架角度调节油缸使三节臂伸出,使滚刷呈面对洗墙面的状态;控制低压水泵开启使滚刷前喷杆喷出洗涤剂;控制高压水泵开启使滚刷后喷杆喷出高压水开始洗刷;所述单刷后侧清洗包括如下步骤:将墙面清洗车停在隧道适当位置;控制稳定器油缸伸出至适当位置,使稳定器油缸顶靠在清洗一侧的前后弹簧钢板上,将底盘大梁与前后桥之间的浮动连接转变为刚性连接;控制后臂架举升油缸使一节臂上升至适当高度;控制后臂架伸缩油缸使二节臂伸出至适当位置;控制后臂架角度调节油缸使三节臂伸出,使滚刷呈面对洗墙面的状态;控制低压
水泵开启使滚刷前喷杆喷出洗涤剂;控制高压水泵开启使滚刷后喷杆喷出高压水开始洗刷;所述双刷同侧清洗包括如下步骤:将墙面清洗车停在隧道适当位置;控制稳定器油缸伸出至适当位置,使稳定器油缸顶靠在清洗一侧的前后弹簧钢板上,将底盘大梁与前后桥之间的浮动连接转变为刚性连接;控制前支撑伸缩油缸同步向下伸出使前支撑轮接触支撑在地面上;控制前臂架举升油缸使一节臂上升至适当高度;控制前臂架伸缩油缸使二节臂伸出至适当位置;控制前臂架角度调节油缸使三节臂伸出,使滚刷呈面对洗墙面的状态;控制后臂架摆动油缸使臂架旋转过垂直位置,摆动到对面侧;控制水平移动滑道移动,使臂架整体向对面侧移动;控制后臂架举升油缸使一节臂上升至适当高度;控制后臂架伸缩油缸使二节臂伸出至适当位置;控制后臂架角度调节油缸使三节臂伸出,使滚刷呈面对洗墙面的状态;控制滚刷驱动控制机构开启使前滚刷和后滚刷旋转;控制前臂架和后臂架水平滑道结构使滚刷靠近洗刷面直至接触;控制低压水泵开启使滚刷前喷杆喷出洗涤剂;控制高压水泵开启使滚刷后喷杆喷出高压水开始洗刷;所述双刷异侧清洗包括如下步骤:将墙面清洗车停在隧道适当位置;控制稳定器油缸伸出至适当位置,使稳定器油缸顶靠在清洗一侧的前后弹簧钢板上,将底盘大梁与前后桥之间的浮动连接转变为刚性连接;控制前支撑伸缩油缸同步向下伸出使前支撑轮接触支撑在地面上;控制前臂架举升油缸使一节臂上升至适当高度;控制前臂架伸缩油缸使二节臂伸出至适当位置;控制前臂架角度调节油缸使三节臂伸出,使滚刷呈面对洗墙面的状态;控制后臂架举升油缸使一节臂上升至适当高度;控制后臂架伸缩油缸使二节臂伸出至适当位置;控制后臂架角度调节油缸使三节臂伸出,使滚刷呈面对洗墙面的状态;控制滚刷驱动控制机构开启使前后滚刷旋转;控制前后臂架水平滑道结构使滚刷靠近洗刷面直至接触;控制低压水泵开启使滚刷前喷杆喷出洗涤剂;控制高压水泵开启使滚刷后喷杆喷出高压水开始洗刷。
6.进一步地,在行走过程中可随时通过旋钮调节行走泵的排量来实现速度的无极调节。
7.进一步地,车辆准备开始清洗时,进行臂架作业姿态准备工作;此时控制阀组的保压阀得电,系统开始建压;控制阀组的换向阀得电,液压油通过板式液压锁进入稳定器的无杆腔,稳定器伸出到位。
8.进一步地,墙面清洗车还包括疏通作业模式,疏通作业时,将车辆停靠在隧道下水道旁边,在高压水管路上接上高压疏通喷头,放入带疏通下水道内,启动高压水系统。
9.本发明的有益效果是:静液压行走,可根据实际情况变速施工,具备超低速施工能力。清洗模式多样化,清洗模式包括单刷前侧清洗、单刷后侧清洗、双刷同侧清洗、双刷异侧清洗;上述清洗模式均可根据实际需求选择是否增加洗涤剂辅助清洗,以及是否开启水路系统加热功能。具备车身平衡系统,可有效提供车辆偏载支撑,保证车身作业平稳。具有下水道疏通功能。
附图说明
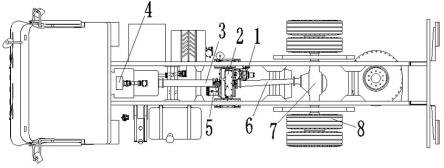
10.图1为本发明行走系统总成结构示意图;
图2为本发明车身平衡系统的液压控制图;图3为本发明疏通系统的液压原理图;图4为图3中多功能驱动阀的放大图;图5为图3中负载敏感泵的放大图;图中,1、行走泵,2、分动箱,3、前传动轴,4、变速箱,5、行走马达,6、后传动轴,7、后车桥,8、后轮胎,9、控制阀组,9-1、溢流阀,9-2、保压阀;9-3、换向阀,10、板式液压锁,11、压力传感器,12、稳定器,31、负载敏感泵,32、高压过滤器,33、多功能驱动阀,33-1、电磁阀ⅰ,33-2、电磁阀ⅱ,33-3、阀后补偿器ⅰ,33-4、阀后补偿器ⅱ,33-5、电磁阀ⅲ,33-6、电磁阀ⅳ,33-7、单向阀ⅰ,33-8、单向阀ⅱ,34、低压水泵驱动马达,35、疏通驱动马达,36、高压水泵驱动马达,37、散热器,38、合流块。
具体实施方式
11.下面根据附图和实施例对本发明进一步说明。
12.一种墙面清洗车的作业方法,包括作业行走方法和清洗方法;如图1所示,作业行走方法通过与底盘匹配的行走系统总成来实现,行走系统总成包括行走泵1、分动箱2、前传动轴3、变速箱4、行走马达5、后传动轴6、后车桥7和后轮胎8;作业行走方法包括如下步骤:在进入作业模式时,操作行走模式切换按钮,通过分动箱2使车辆从底盘机械行走进入液压行走状态,此时行走泵1和行走马达5进入待机状态,行走动力从变速箱4通过前传动轴3导入分动箱2,带动行走泵1旋转;行走泵待机状态排量几乎为零,车辆静止等待进一步的指令。开始行走时,通过驾驶室内旋钮调节,行走泵1排量增大,带动行走马达5旋转,行走马达5通过分动箱2带动后传动轴6旋转,然后通过后车桥7变速,最终带动后轮胎8旋转实现车辆静液压行走;在行走过程中可随时通过旋钮调节行走泵1的排量来实现速度的无极调节。
13.本技术依托具有前刷和后刷的双刷墙面清洗车,清洗方法包括单刷前侧清洗、单刷后侧清洗、双刷同侧清洗和双刷异侧清洗;所述单刷前侧清洗包括如下步骤:将墙面清洗车停在隧道适当位置;控制稳定器油缸伸出至适当位置,使稳定器油缸顶靠在清洗一侧的前后弹簧钢板上,将底盘大梁与前后桥之间的浮动连接转变为刚性连接;控制前支撑伸缩油缸同步向下伸出使前支撑轮接触支撑在地面上;控制前臂架举升油缸使一节臂上升至适当高度;控制前臂架伸缩油缸使二节臂伸出至适当位置;控制前臂架角度调节油缸使三节臂伸出,使滚刷呈面对洗墙面的状态;控制低压水泵开启使滚刷前喷杆喷出洗涤剂;控制高压水泵开启使滚刷后喷杆喷出高压水开始洗刷;所述单刷后侧清洗包括如下步骤:将墙面清洗车停在隧道适当位置;控制稳定器油缸伸出至适当位置,使稳定器油缸顶靠在清洗一侧的前后弹簧钢板上,将底盘大梁与前后桥之间的浮动连接转变为刚性连接;控制后臂架举升油缸使一节臂上升至适当高度;控制后臂架伸缩油缸使二节臂伸出至适当位置;控制后臂架角度调节油缸使三节臂伸出,使滚刷呈面对洗墙面的状态;控制低压水泵开启使滚刷前喷杆喷出洗涤剂;控制高压水泵开启使滚刷后喷杆喷出高压水开始洗
刷;所述双刷同侧清洗包括如下步骤:将墙面清洗车停在隧道适当位置;控制稳定器油缸伸出至适当位置,使稳定器油缸顶靠在清洗一侧的前后弹簧钢板上,将底盘大梁与前后桥之间的浮动连接转变为刚性连接;控制前支撑伸缩油缸同步向下伸出使前支撑轮接触支撑在地面上;控制前臂架举升油缸使一节臂上升至适当高度;控制前臂架伸缩油缸使二节臂伸出至适当位置;控制前臂架角度调节油缸使三节臂伸出,使滚刷呈面对洗墙面的状态;控制后臂架摆动油缸使臂架旋转过垂直位置,摆动到对面侧;控制水平移动滑道移动,使臂架整体向对面侧移动;控制后臂架举升油缸使一节臂上升至适当高度;控制后臂架伸缩油缸使二节臂伸出至适当位置;控制后臂架角度调节油缸使三节臂伸出,使滚刷呈面对洗墙面的状态;控制滚刷驱动控制机构开启使前滚刷和后滚刷旋转;控制前臂架和后臂架水平滑道结构使滚刷靠近洗刷面直至接触;控制低压水泵开启使滚刷前喷杆喷出洗涤剂;控制高压水泵开启使滚刷后喷杆喷出高压水开始洗刷;所述双刷异侧清洗包括如下步骤:将墙面清洗车停在隧道适当位置;控制稳定器油缸伸出至适当位置,使稳定器油缸顶靠在清洗一侧的前后弹簧钢板上,将底盘大梁与前后桥之间的浮动连接转变为刚性连接;控制前支撑伸缩油缸同步向下伸出使前支撑轮接触支撑在地面上;控制前臂架举升油缸使一节臂上升至适当高度;控制前臂架伸缩油缸使二节臂伸出至适当位置;控制前臂架角度调节油缸使三节臂伸出,使滚刷呈面对洗墙面的状态;控制后臂架举升油缸使一节臂上升至适当高度;控制后臂架伸缩油缸使二节臂伸出至适当位置;控制后臂架角度调节油缸使三节臂伸出,使滚刷呈面对洗墙面的状态;控制滚刷驱动控制机构开启使前后滚刷旋转;控制前后臂架水平滑道结构使滚刷靠近洗刷面直至接触;控制低压水泵开启使滚刷前喷杆喷出洗涤剂;控制高压水泵开启使滚刷后喷杆喷出高压水开始洗刷。
14.在进入双刷同侧清洗模式时,需打开车身平衡系统,将车身稳定装置打开,提供单侧偏载重心支撑,保持整车作业稳定性。如图2所示液压控制原理图,控制阀组9具有进油口p和回油口t,控制阀组9进油口连接高压油源。控制阀组9包括溢流阀9-1、保压阀9-2和换向阀9-3。溢流阀9-1进油口连接进油口p,溢流阀9-1回油口连接回油口t。保压阀9-2采用二位两通电磁阀,保压阀9-2进油口连接进油口p,保压阀9-2回油口连接回油口t。换向阀9-3采用三位四通电磁阀,换向阀9-3进油口连接进油口p,换向阀9-3回油口连接回油口t,换向阀9-3出油口分别通过板式液压锁10连接所述稳定器12。
15.稳定器12的大腔连接有压力传感器11,压力传感器11连接有控制器。控制器连接有显示器,显示器用于显示压力传感器11监测数据;显示器安装在车辆驾驶室。压力传感器11将数据通过有线或无线传输至控制器。有线可以采用信号线或can总线,无线可以采用wifi、蓝牙、zigbee、2g、3g、4g、5g中的任意一种。
16.车辆准备开始清洗时,进行臂架作业姿态准备工作;此时控制阀组9的保压阀9-2电磁铁yv1得电,系统开始建压;控制阀组9的换向阀9-3电磁铁yv3得电,液压油通过板式液压锁10进入稳定器12的无杆腔,稳定器12伸出到位。
17.墙面清洗车还包括疏通作业模式,疏通作业时,将车辆停靠在隧道下水道旁边,在
高压水管路上接上高压疏通喷头,放入带疏通下水道内,启动高压水系统。
18.如图3至图5所示,包括负载敏感泵31和多功能驱动阀33,负载敏感泵31的进油口通过过滤器与油箱相连,负载敏感泵31的出油口通过高压过滤器32与多功能驱动阀33的进油口连通。多功能驱动阀33上连接有低压水泵驱动马达34和高压水泵驱动马达36。所述多功能驱动阀33包括电磁阀ⅰ33-1和电磁阀ⅱ33-2,电磁阀ⅰ33-1和电磁阀ⅱ33-2均与多功能驱动阀33的进油口相连,电磁阀ⅰ33-1的工作油口通过多功能驱动阀33的a11油口与所述高压水泵驱动马达36的进油口相连,电磁阀ⅱ33-2的工作油口通过多功能驱动阀33的a2油口与所述低压水泵驱动马达34的进油口相连,所述高压水泵驱动马达36的回油口通过多功能驱动阀33的b11油口与多功能驱动阀33的回油口相连,所述低压水泵驱动马达34的回油口通过多功能驱动阀33的b2油口与多功能驱动阀33的回油口相连,多功能驱动阀33的回油口依次通过合流块38、散热器37接回油箱。所述电磁阀ⅰ33-1通过pwm1电流调节,所述电磁阀ⅱ33-2通过pwm2电流调节。高低压水路的驱动油路通过多功能驱动阀33将负载端的压力信号反馈至负载敏感泵31,实现负载端压力始终和负载敏感泵31的输出压力相适应,最大程度的降低不必要的能量损失;所有水路的水流量可以根据墙面脏污程度通过负载敏感泵31进行无极调节(高压水路通过pwm1电流进行调节,低压水泵通过pwm2电流进行调节),以达到节水效果从而提高整箱水的续航能力。清洗工作时,低压水路用于滚刷预湿和洗涤剂喷洒;高压水路用于高压冲洗墙面、冲洗路面和喷枪定点清洗。
19.作为本实施例的改进,所述电磁阀ⅰ33-1与所述高压水泵驱动马达36之间还设有阀后补偿器ⅰ33-3,所述电磁阀ⅱ33-2与所述低压水泵驱动马达34之间还设有阀后补偿器ⅱ33-4。阀后补偿器保证高低压水路流量调节的独立性,更好的适应不同的作业环境。
20.作为本实施例的改进,所述高压水泵驱动马达36的进油口与所述高压水泵驱动马达36的回油口之间还设有单向阀ⅰ33-7,单向阀ⅰ33-7由所述高压水泵驱动马达36的回油口朝所述高压水泵驱动马达36的进油口单向流通;所述低压水泵驱动马达34的进油口与所述低压水泵驱动马达34的回油口之间还设有单向阀ⅱ33-8,单向阀ⅱ33-8由所述低压水泵驱动马达34的回油口朝所述低压水泵驱动马达34的进油口单向流通。上述单向阀的设置是为了在高压水泵驱动马达或低压水泵驱动马达在泄压时,起到压力保护的作用。
21.作为本实施例的改进,还包括疏通驱动马达35,所述电磁阀ⅰ33-1通过电磁阀ⅲ33-5与所述高压水泵驱动马达36的进油口相连;所述电磁阀ⅰ33-1依次通过电磁阀ⅳ33-6、多功能驱动阀33的a12油口与所述疏通驱动马达35的进油口相连,疏通驱动马达35的回油口通过多功能驱动阀33的b12油口与多功能驱动阀33的回油口相连。所述电磁阀ⅲ33-5在未得电的初始开关状态与所述电磁阀ⅳ33-6在未得电的初始开关状态相反。优选地,所述电磁阀ⅲ33-5处于常开状态,所述电磁阀ⅳ33-6处于常闭状态。所述电磁阀ⅰ33-1与所述电磁阀ⅲ33-5之间还设有阀后补偿器ⅰ33-3,所述电磁阀ⅱ33-2与所述低压水泵驱动马达34之间还设有阀后补偿器ⅱ33-4。在高压清洗工作时,电磁阀ⅰ33-1切换至左工位,电磁阀ⅲ33-5不得电,电磁阀ⅳ33-6不得电,液压油驱动高压水泵驱动马达36工作。电磁阀ⅲ33-5得电换到左工位,电磁阀ⅳ33-6得电换到上工位,液压油驱动疏通驱动马达35工作,进行下水道疏通,疏通驱动马达35的设置达到了一机多用的效果。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1