一种用于箱梁斜腹板混凝土的自动振捣装置及施工方法与流程
1.本发明涉及桥梁施工设备技术领域。更具体地说,本发明涉及一种用于箱梁斜腹板混凝土的自动振捣装置及施工方法。
背景技术:
2.箱型梁是一种常见的桥梁结构,因其截面形状类似箱子,故被称为箱梁,不管是预制箱梁还是现浇箱梁,在浇筑混凝土后,均需进行混凝土的振捣,特别是现浇混凝土,施工场地复杂,由于腹板是倾斜的,需要大量人工手持传统的电机外置的传动轴带动的振捣棒进行振捣,在自由状态下,难以适应混凝土箱梁腹板的斜度,无法精确插入至待振捣的位置,造成腹板混凝土欠振、漏振,且振捣作业所需工人数量较多,劳动强度大,振捣质量很大程度上依靠工人的工作经验、责任心和自觉性。
3.为了实现箱梁腹板振捣自动化作业,提高施工效率和振捣质量,减少人工投入,降低施工风险,需要一种可以进行箱梁斜腹板混凝土振捣的自动振捣装置及施工方法。
技术实现要素:
4.本发明的一个目的是提供一种用于箱梁斜腹板混凝土的自动振捣装置及施工方法,实现箱梁腹板振捣自动化作业,提高施工效率和振捣质量,减少人工投入,降低施工风险。
5.为了实现根据本发明的这些目的和其它优点,提供了一种用于箱梁斜腹板混凝土的自动振捣装置,包括:
6.平台,其设置在箱梁顶板上;
7.油缸铰座,其固定的设置在所述平台的顶面,调节油缸的一端与所述油缸铰座铰接,另一端与导向架的内侧壁铰接,所述导向架的顶端设有固定架,沿所述箱梁的横向在所述固定架上对称的设有两个导向轮;
8.导轨,其贴靠于所述导向架的外侧壁设置,所述导轨上滑动设有滑块,所述滑块上固定设有导向块,所述导向块为中空结构;
9.导向管,其为中空结构,所述导向管的一端设置在所述导向块的内部,另一端伸入至箱梁腹板内;
10.卷筒,其设置在所述平台顶面并通过伺服电机驱动转动,所述卷筒上绕设有电缆的一端,所述电缆的另一端绕设于两个所述导向轮后再向下依次从所述导向块和所述导向管的内部穿过并与高频振捣棒电连接,所述高频振捣棒位于所述导向管的下方;
11.其中,远离所述平台的导向轮上设有编码器,其用于计算电缆的下放长度,所述导轨上设有倾角传感器,其用于监测导轨与水平面的夹角。
12.优选的是,还包括刮泥器,其套设于所述导向管的下端,所述刮泥器为环形弹性橡胶套结构,且其内径略小于所述电缆的外径。
13.优选的是,所述调节油缸沿竖直方向设有两个。
14.优选的是,沿所述箱梁的纵向还铺设有轨道,所述平台移动的设置在所述轨道上,所述轨道上设有距离传感器。
15.优选的是,所述平台的顶面还设有控制柜,其用于驱动所述高频振捣棒和所述调节油缸。
16.优选的是,所述高频振捣棒的底部同样设有距离传感器。
17.优选的是,所述调节油缸上设有油缸行程传感器,所述控制柜与所述油缸行程传感器、所述倾角传感器、所述高频振捣棒底部的距离传感器电连接以实现数据传输。
18.优选的是,所述控制柜包括:
19.存储单元,其用于存储箱梁腹板与水平面的预设夹角、调节油缸的油缸杆伸出的预设阀值;
20.接收单元,其用于接收倾角传感器、油缸行程传感器和高频振捣棒底部的距离传感器监测的数据;
21.执行单元,其接收倾角传感器监测的数据与预设夹角对比后对调节油缸进行控制,通过控制调节油缸带动导向管上的导轨定位,以使得导轨上的倾角传感器的数据与存储单元中预设夹角相等,所述执行单元还获取油缸行程传感器监测的数据对调节油缸进行保护,当油缸行程传感器监测的数据超过油缸杆伸出的预设阀值时,执行单元控制调节油缸停止动作,所述执行单元还获取高频振捣棒底部的距离传感器监测的数据,对高频振捣棒进行控制;
22.其中,所述存储单元、所述接收单元和所述执行单元之间相互进行信息传输。
23.一种适用于箱梁斜腹板混凝土的自动振捣装置的施工方法,包括以下步骤:
24.s1、对箱梁腹板进行混凝土浇筑后沿箱梁铺设纵向轨道,振捣装置安装就位;
25.s2、启动振捣装置,控制柜控制调节油缸完成导轨的定位,使其倾斜角度与箱梁的腹板斜度相匹配;
26.s3、滑块在滑轨上向下滑动带动导向块移动,使导向块上的导向管也随之向下滑动;
27.s4、滑块滑动的同时伺服电机开始转动,电缆随导向管的下放也随之下放,且电缆通过编码器监测下放距离,以判断高频振捣棒是否下放至振捣点;
28.s5、待高频振捣棒底部的距离传感器接触混凝土面后,控制柜控制高频振捣棒开始振捣,待高频振捣棒到达振捣点后,伺服电机停止转动,振捣棒悬停振捣,在对上层混凝土进行振捣时,高频振捣棒需插入下层混凝土5~10cm,使上下层混凝土通过振捣有效结合,避免分层;
29.s6、该段混凝土振捣结束后,整机沿轨道纵移,并通过轨道上的距离传感器监测到整机移动至下一段振捣位置后,继续按要求振捣,同时根据浇筑进度及顺序,改变滑块在导轨的滑动距离及电缆和高频振捣棒的下放高度,进行不同深度混凝土的振捣;
30.s7、整节箱梁振捣完成后,滑块向滑轨上方滑动,带动导向块及导向管回收,同时卷筒带动电缆回收,刮泥器将电缆上的混凝土清除干净。
31.本发明至少包括以下有益效果:
32.1、本发明的振捣装置代替人工进行振捣,振捣频率可调,振捣时间,振捣深度可控;
33.2、本发明可适应不同角度、高度的斜腹板振捣作业;
34.3、本发明施工全过程为机械化、自动化施工,减少了现场人工的投入、提高了混凝土外观结构质量。
35.本发明的其它优点、目标和特征将部分通过下面的说明体现,部分还将通过对本发明的研究和实践而为本领域的技术人员所理解。
附图说明
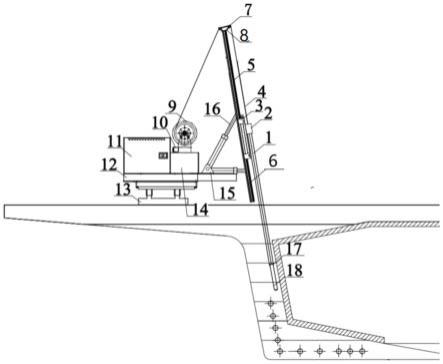
36.图1为本发明的振捣装置结构示意图;
37.图2为本发明固定架和导向轮的结构示意图;
38.图3为本发明的混凝土箱梁结构示意图;
39.图4为本发明的施工流程示意图。
40.附图标记说明:
41.1、导向管,2、导向块,3、滑块,4、电缆,5、导轨,6、导向架,7、导向轮,8、固定架,9、卷筒,10、伺服电机,11、控制柜,12、平台,13、轨道,14、泵站,15、油缸铰座,16、调节油缸,17、刮泥器,18、高频振捣棒,19、顶板,20、腹板,21、底板,22、波纹管。
具体实施方式
42.下面结合附图对本发明做进一步的详细说明,以令本领域技术人员参照说明书文字能够据以实施。
43.需要说明的是,在本发明的描述中,术语“横向”、“纵向”、“上”、“下”、“前”、“后”、“左”、“右”、“竖直”、“水平”、“顶”、“底”、“内”、“外”等指示的方位或位置关系为基于附图所示的方位或位置关系,仅是为了便于描述本发明和简化描述,并不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本发明的限制。
44.如图1-4所示,一种用于箱梁斜腹板混凝土的自动振捣装置,包括:
45.平台12,其设置在箱梁顶板19上;
46.油缸铰座15,其固定的设置在所述平台12的顶面,调节油缸16的一端与所述油缸铰座15铰接,另一端与导向架6的内侧壁铰接,所述导向架6的顶端设有固定架8,沿所述箱梁的横向在所述固定架8上对称的设有两个导向轮7;
47.导轨5,其贴靠于所述导向架6的外侧壁设置,所述导轨5上滑动设有滑块3,所述滑块3上固定设有导向块2,所述导向块2为中空结构;
48.导向管1,其为中空结构,所述导向管1的一端设置在所述导向块2的内部,另一端伸入至箱梁腹板20内;
49.卷筒9,其设置在所述平台12顶面并通过伺服电机10驱动转动,所述卷筒上绕设有电缆4的一端,所述电缆4的另一端绕设于两个所述导向轮7后再向下依次从所述导向块2和所述导向管1的内部穿过并与高频振捣棒18电连接,所述高频振捣棒18位于所述导向管1的下方;
50.其中,远离所述平台12的导向轮7上设有编码器,其用于计算电缆4的下放长度,所述导轨5上设有倾角传感器,其用于监测导轨5与水平面的夹角。
51.在上述技术方案中,箱梁主要由顶板19、腹板20、底板21组成,内部有钢筋、波纹管22等,整个装置通过平台12支撑固定在箱梁的顶板19上,平台12上通过调节油缸16连接有导向架6,导向架6上设有导轨5,滑块3在工作人员的推动下在导轨5上滑动,带动滑块3上的导向块2滑动,导向块2中间穿孔,导向管1从孔中穿过,跟随导向块2在滑块3的带动下进行下放和起升,从而调节导向管1在箱梁腹板20内的高度,高频振捣棒18通过电缆4连接于导向管1的下方,跟随导向管1在导向块2和滑块3的带动下进行下放和起升,同时工作人员控制伺服电机10驱动卷筒9发生正反转,从而实现电缆4沿着导向轮7和导向管1进行收放,进而实现高频振捣棒18在腹板20内的振捣位置变换,电缆4采用耐磨、耐腐蚀、可卷绕弯曲、耐拉的材质,与高频振捣棒18相连,并通过卷筒实现收放,卷筒配备有伺服电机10、减速器,可精确控制振捣棒的提升和下降速度,达到快插慢拔的振捣要求;高频振捣棒18在下放时,不与波纹管22接触,待下放至振捣点处,工作人员停止滑动滑块3,同时控制伺服电机10停止转动,使得振捣棒位于振捣点处;通过调节油缸16的伸缩实现驱动导向管1的角度进行调整,从而带动导向管1上的导轨5的角度进行调整,调整过程中通过倾角传感器对导轨5倾斜角度进行监测,从而实现导轨5与腹板20的角度一致,进而高频振捣棒18实现沿着与腹板20相同的角度进行振捣,高频振捣棒18到达混凝土面时开始振捣,边振捣边继续向下延伸,直到工作人员凭借经验认为振捣棒到达振捣点后,停止滑动滑块3以及控制伺服电机10停止转动,使得振捣棒在振捣点处悬停振捣,高频振捣棒18为频率可以调节的振捣棒,可根据混凝土的水灰比、坍落度等参数不同一键调频至混凝土最佳共振点;导向架6上的固定架8起到对电缆4的导向和支撑的作用,使得电缆4的倾斜角度与导向管1的倾斜角度相同,并且在远离平台12的导向轮7处安装编码器,用于监测施工过程中电缆4的下放长度,在施工前,工作人员通过算法计算得出高频振捣棒18下放至箱梁腹板20的深度,也就是振捣点处电缆4需要下放的长度,在施工过程中,工作人员观测编码器监测的数据与计算结果进行对比,以判断振捣棒是否下放到位,从而避免通过人为经验判断导致的腹板20混凝土欠振、漏振,算法如下:
52.已知振捣棒下放至箱梁腹板20的深度为h
x
,电缆4下放点至箱梁顶板19上表面距离经测量后为h,则:
53.h=h
x
+h
54.h为电缆4下放至振捣棒端部高度;
55.已知h和倾角传感器监测到的振捣棒与水平面的夹角α,以及振捣棒棒头测量的长度为lb,则:
56.l
×
s inα=h
57.ld+lb=l,
58.ld为振捣棒下放至振捣深度处,电缆4需要下放的长度;
59.电缆4经导向轮7改变方向后,编码传感器开始计算电缆4下放长度lw,当观察到lw与ld数值相等,则说明振捣棒下放到位,卷筒9停止工作,电缆4不再继续下放,振捣棒开始悬停振捣;
60.根据振捣要求,对上层混凝土进行振捣时,需要将振捣棒插入下层混凝土5-10cm,上下层混凝土同时进行振捣,避免分层,同样可以通过算法对振捣棒插入混凝土的深度进行计算,以判断振捣棒是否达到插入深度,具体为:
61.振捣棒接触到混凝土面时,开始振动,从振捣棒开始振捣,编码器计算下放的电缆4长度lc,即:lc×
sinα=hc62.hc即为振捣棒18插入混凝土的深度,将hc与振捣的混凝土的深度进行对比,看是否超过混凝土厚度的5-10cm。
63.在另一种技术方案中,还包括刮泥器17,其套设于所述导向管1的下端,所述刮泥器17为环形弹性橡胶套结构,且其内径略小于所述电缆4的外径。
64.在本技术方案中,电缆4穿过刮泥器17上的内环与振捣棒连接,刮泥器17用于在完成振捣工作回收电缆4和振捣棒时,将电缆4携带的混凝土刮除,避免混凝土进入导向管1,将导向管1堵塞。
65.在另一种技术方案中,所述调节油缸16沿竖直方向设有两个。
66.在本技术方案中,调节油缸16用来调节导向架6上的导向管1的位置和角度,其设置为两个,实现对导向架6更稳定地连接调整,调节油缸16通过设置在平台12上的泵站14提供动力。
67.在另一种技术方案中,沿所述箱梁的纵向还铺设有轨道13,所述平台12移动的设置在所述轨道13上,所述轨道13上设有距离传感器。
68.在本技术方案中,轨道13沿着箱梁纵向铺设,整个振捣装置可在轨道13上纵移,并且配有走行距离传感器,通过距离传感器实时记录整机沿箱梁纵向移动的距离及位置,对整段箱梁的腹板20进行分段振捣。
69.在另一种技术方案中,所述平台12的顶面还设有控制柜11,其用于驱动所述高频振捣棒18和所述调节油缸16。
70.在本技术方案中,控制柜11用于控制调节油缸16以实现自动调节导向管1的倾斜角度;控制柜11还能控制高频振捣棒18启停,确保振动时间可控,避免过振、漏振、欠振等现象,以实现装置的自动振捣。
71.在另一种技术方案中,所述高频振捣棒18的底部同样设有距离传感器。
72.在本技术方案中,距离传感器用于实时监测振捣棒棒头至混凝土面的距离,当检测到振捣棒的端部触碰到混凝土面后,启动振捣棒开始振捣,避免振捣棒空振。
73.在另一种技术方案中,所述调节油缸16上设有油缸行程传感器,所述控制柜11与所述油缸行程传感器、所述倾角传感器、所述高频振捣棒18底部的距离传感器电连接以实现数据传输;
74.所述控制柜11包括:
75.存储单元,其用于存储箱梁腹板20与水平面的预设夹角、调节油缸16的油缸杆伸出的预设阀值;
76.接收单元,其用于接收倾角传感器、油缸行程传感器和高频振捣棒18底部的距离传感器监测的数据;
77.执行单元,其接收倾角传感器监测的数据与预设夹角对比后对调节油缸16进行控制,通过控制调节油缸16带动导向管1上的导轨5定位,以使得导轨5上的倾角传感器的数据与存储单元中预设夹角相等,所述执行单元还获取油缸行程传感器监测的数据对调节油缸16进行保护,当油缸行程传感器监测的数据超过油缸杆伸出的预设阀值时,执行单元控制调节油缸16停止动作,所述执行单元还获取高频振捣棒18底部的距离传感器监测的数据,
对高频振捣棒18进行控制;
78.其中,所述存储单元、所述接收单元和所述执行单元之间相互进行信息传输。
79.在本技术方案中,通过油缸行程传感器、倾角传感器、距离传感器与控制柜11电连接并进行数据传输,从而实现装置的自动化作业,具体表现为:振捣前,滑块3位于导向架6的上端,倾角传感器实时监测导轨5与水平面的夹角,并将数据传输给接收单元,接收单元将此数据传送给执行单元,执行单元将倾角传感器监测的数据与存储单元中的预设夹角进行比对,若两个数据不相等,执行单元驱动调节油缸16伸缩对导轨5的角度进行调整,直到倾角传感器监测的数据与预设夹角相等后,执行单元控制调节油缸16停止伸缩,以实现高频振捣棒18沿着与腹板20相同的角度进行振捣的目的,且调节油缸16在伸缩的过程中,油缸行程传感器实时监测油缸杆的伸出值,并传输给接收单元,接收单元再将此数据传送给执行单元,执行单元将此数据与存储单元中油缸杆伸出的预设阀值进行对比,一旦油缸行程传感器监测的数据超过油缸杆伸出的预设阀值,说明超出了调节油缸16的伸缩范围,有可能会损害调节油缸16,执行单元控制调节油缸16停止动作;待导轨5的角度调整完成后,工作人员启动伺服电机10正转下放电缆4,并推动滑块3下移,带动振捣棒向下延伸,同时编码器继续计算电缆4下放长度,振捣棒底部的距离传感器实时监测与混凝土的距离传输给接收单元,接收单元将此数据传输给执行单元,待接收单元接收到距离传感器接触到混凝土表面时,执行单元控制振捣棒开始振捣,振捣过程中,振捣棒持续向下延伸,当工作人员观测到编码器测量的电缆4下放长度与施工前通过算法计算得出高频振捣棒18下放至振捣点处电缆4需要下放的长度相等时,说明振捣棒到达振捣点,工作人员控制伺服电机10停止转动,振捣棒悬停振捣,振捣完成后,工作人员控制伺服电机10反转收紧电缆4,带动振捣棒提升至上一层振捣点处,悬停振捣,直到整段混凝土振捣完成后,伺服电机10继续反转收紧振捣棒至初始位置;
80.本发明的编码器和伺服电机还可以和控制柜电连接,以实现数据传输,在存储单元中按照施工顺序依次存储每一个振捣点的预设值,对首层混凝土进行振捣时,电缆带动振捣棒下放并通过编码器监测下放距离,传输给接收单元,执行单元检测到接收单元中电缆下放的距离与首层振捣点的预设值相等时,说明振捣棒到达振捣点,执行单元控制伺服电机停止转动,振捣棒停止下放,悬停振捣;对上层混凝土进行振捣时,伺服电机反转收紧电缆带动振捣棒上提至执行单元检测到振捣棒到达上层振捣点,伺服电机停止工作,振捣棒悬停振捣,从而实现全自动化施工,其工作原理与现有的控制原理相同。
81.一种用于箱梁斜腹板20混凝土的自动振捣装置的施工方法,包括以下步骤:
82.s1、对箱梁腹板20进行混凝土浇筑后沿箱梁铺设纵向轨道13,振捣装置安装就位;
83.s2、启动振捣装置,控制柜11控制调节油缸16完成导轨5的定位,使其倾斜角度与箱梁的腹板20斜度相匹配;
84.s3、滑块3在滑轨上向下滑动带动导向块2移动,使导向块2上的导向管1也随之向下滑动;
85.s4、滑块3滑动的同时伺服电机10开始转动,电缆4随导向管1的下放也随之下放,且电缆4通过编码器监测下放距离,以判断高频振捣棒18是否下放至振捣点;
86.s5、待高频振捣棒18底部的距离传感器接触混凝土面后,控制柜11控制高频振捣棒18开始振捣,待高频振捣棒18到达振捣点后,伺服电机10停止转动,振捣棒悬停振捣,在
对上层混凝土进行振捣时,高频振捣棒18需插入下层混凝土5~10cm,使上下层混凝土通过振捣有效结合,避免分层;
87.s6、该段混凝土振捣结束后,整机沿轨道13纵移,并通过轨道13上的距离传感器监测到整机移动至下一段振捣位置后,继续按要求振捣,同时根据浇筑进度及顺序,改变滑块3在导轨5的滑动距离及电缆4和高频振捣棒18的下放高度,进行不同深度混凝土的振捣;
88.s7、整节箱梁振捣完成后,滑块3向滑轨上方滑动,带动导向块2及导向管1回收,同时卷筒带动电缆4回收,刮泥器17将电缆4上的混凝土清除干净。
89.尽管本发明的实施方案已公开如上,但其并不仅仅限于说明书和实施方式中所列运用,它完全可以被适用于各种适合本发明的领域,对于熟悉本领域的人员而言,可容易地实现另外的修改,因此在不背离权利要求及等同范围所限定的一般概念下,本发明并不限于特定的细节和这里示出与描述的图例。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1