履带式多功能伤员搜救机器人的制作方法
1.本实用新型涉及到多功能伤员搜救的技术领域,更加具体地是履带式多功能伤员搜救机器人。
背景技术:
2.如何提升和发挥应急救援手段,科学有效地应对灾害,在复杂危险地情中打开一条生命通道,构建灾情事故救援网络保障体系,确保灾情地区的真实信息能够得到有效传输,已成为广泛关注的问题。
3.如何构建灾情信息及时一体化即是被广泛关注的问题之一。
4.在面对自然灾害或城市恐怖袭击中,一些复杂环境的勘察以及危险品的转移都仅仅依靠小型无人车以及人力搜索和担架运输伤员,
5.目前这种方式的搜救方式不仅效率低下,而且容易产生二次事故等问题,目前尚没有很好的解决办法。
6.现有技术中的救援方法多是采取救援人员直接试探性进入陌生灾区、危险地区。少部分利用无人机或是小型无人车进行现场勘察,但一直没有一辆能够实现全地形、全功能勘察、危险品转移以及伤员转移为一体的履带式多功能伤员搜救机器人。
7.因此,急需一种装置来解决上述问题。
技术实现要素:
8.本实用新型的目的在于克服上述背景技术的不足之处,而提出履带式多功能伤员搜救机器人。
9.本实用新型的目的是通过如下技术方案来实施的:履带式多功能伤员搜救机器人,它位于机械坦克车上,还包括感应式抓子、伤员运输舱、红外热成像仪、喊话喇叭模块、多功能机械抓取臂和伸缩云台;
10.所述的机械坦克车上方设置有伤员运输舱,所述的伤员运输舱内安装有可旋转的所述的感应式抓子,所述的伤员运输舱前端安装有红外热成像仪、喊话喇叭模块和伸缩云台,所述的伤员运输舱前端固定有机械抓取臂。
11.在上述技术方案中:在机械坦克车的履带上安装有4g通讯模块和915hz无线电双冗余控制系统。
12.本实用新型具有如下优点:1、本实用新型解决了特种救援中因不熟悉复杂地形而导致的意外二次伤害、灾区中被困人员的自动转移、危险品转移中转移人员的危险性等安全问题。
13.2、本实用新型整体装置在复杂地形的通过率和多功能性是普通无人车无法比拟的,且整体操作简单、功能可靠、维护成本低廉,使用方便。
附图说明
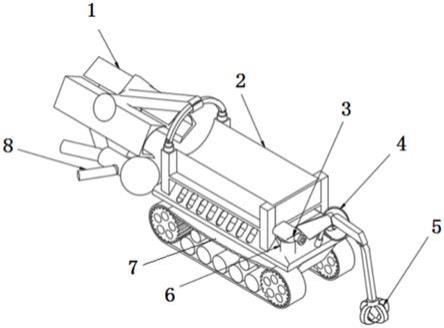
14.图1为本实用新型的结构示意图。
15.图中:感应式抓子1、伤员运输舱2、红外热成像仪3、喊话喇叭模块4、多功能机械抓取臂5、伸缩云台6、机械坦克车7、伤员或危险品8。
具体实施方式
16.下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。
17.参照图1所示:履带式多功能伤员搜救机器人,它位于机械坦克车7上,还包括感应式抓子1、伤员运输舱2、红外热成像仪3、喊话喇叭模块4、多功能机械抓取臂5和伸缩云台6;
18.所述的机械坦克车7上方设置有伤员运输舱2,所述的伤员运输舱2内安装有可旋转的所述的感应式抓子1,所述的伤员运输舱2前端安装有红外热成像仪3、喊话喇叭模块4和伸缩云台6,所述的伤员运输舱2前端固定有机械抓取臂5。
19.在机械坦克车7的履带上安装有4g通讯模块和915hz无线电双冗余控制系统。4g通讯模块和915hz无线电双冗余控制系统使坦克车无论在城市道路还是野外环境都能远距离精准控制(4g通讯模块和915hz无线电双冗余控制系统在机械坦克车7的履带上的安装为现有的常规成熟技术。)
20.本实用新型还包括如下具体使用过程:救援开始。
21.①
、操纵者手持遥控器(遥控器为常规仪器)控制无人救援坦克 (即本实用新型整体结构)到灾区或危险区域附近,通过红外热成像仪2采集并由图传传输过来的实时画面精确了解灾区内实时情况、发现危险品后开始处理。
22.②
此时,操纵者通过遥控器远程控制喊话喇叭模块(通过内部设置的喇叭对伤员8进行喊话和安抚伤员8情绪)对现场进行场地危险度数进行报警,通过伸缩云台6内设置的相机将现场具体情况通过图像发射传送到指挥端。
23.③
操纵者通过遥控器远程控制多功能机械抓取臂5将前方的危险品抓起并进行清理。
24.④
操纵者通过遥控器旋转、调转感应式抓子1和多功能机械抓取臂5前后位置,接着远程控制感应式抓子1将伤员8抓起转至伤员运输舱2内。
25.⑤
操纵者操纵遥控器遥控本实用新型携带伤员或者危险品转移至安全区域。
26.当面对危险品8时;操纵者通过遥控器远程控制多功能机械抓取臂5使危险品8与多功能机械抓取臂5脱离,在安全区域对危险品8 进行处理。转移危险品8任务结束。
27.上述未详细说明的部分均为现有技术。
技术特征:
1.履带式多功能伤员搜救机器人,它位于机械坦克车(7)上,其特征在于:还包括感应式抓子(1)、伤员运输舱(2)、红外热成像仪(3)、喊话喇叭模块(4)、多功能机械抓取臂(5)和伸缩云台(6);所述的机械坦克车(7)上方设置有伤员运输舱(2),所述的伤员运输舱(2)内安装有可旋转的所述的感应式抓子(1),所述的伤员运输舱(2)前端安装有红外热成像仪(3)、喊话喇叭模块(4)和伸缩云台(6),所述的伤员运输舱(2)前端固定有机械抓取臂(5)。2.根据权利要求1所述的履带式多功能伤员搜救机器人,其特征在于:在机械坦克车(7)的履带上安装有4g通讯模块和915hz无线电双冗余控制系统。
技术总结
本实用新型公布了履带式多功能伤员搜救机器人,它位于机械坦克车(7)上,还包括感应式抓子(1)、伤员运输舱(2)、红外热成像仪(3)、喊话喇叭模块(4)、多功能机械抓取臂(5)和伸缩云台(6);所述的机械坦克车(7)上方设置有伤员运输舱(2),所述的伤员运输舱(2)内安装有可旋转的所述的感应式抓子(1),所述的伤员运输舱(2)前端安装有红外热成像仪(3)、喊话喇叭模块(4)和伸缩云台(6),所述的伤员运输舱(2)前端固定有机械抓取臂(5)。它克服了现有技术中搜救方式不仅效率低下,而且容易产生二次事故等问题的缺点,具有整体操作简单、功能可靠、维护成本低廉,使用方便的优点。使用方便的优点。使用方便的优点。
技术研发人员:向东
受保护的技术使用者:武汉中智航无人机技术服务有限公司
技术研发日:2020.11.09
技术公布日:2021/12/21
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1