一种变电站巡检机器人防破坏装置的制作方法
1.本实用新型涉及变电站巡检机器人技术领域,具体为一种变电站巡检机器人防破坏装置。
背景技术:
2.在电力行业中,巡检机器人是自动执行变电站工作的机器装置。它既可以接受人类指挥,又可以运行预先设定的程序,也可以根据以人工智能技术制定的原则纲领行动。巡检机器人的任务是协助或替代人类对变电站执行安全和维护的工作,因此在电力行业中,机器人的出现可以有效节省人工成本,使工作更加便利。
3.检机器人在实际工作过程中,往往需要不停的移动来巡视变电站内的运行情况和突发情况,如果突遇障碍物或发生碰撞,造成巡检机器人发生损坏。
技术实现要素:
4.(一)解决的技术问题
5.为了解决现有技术的上述问题,本实用新型提一种变电站巡检机器人防破坏装置,能够有效的对机器人进行防护,避免其发生损坏。
6.(二)技术方案
7.为了达到上述目的,本实用新型采用的主要技术方案:包括机器人本体,所述机器人本体底部安装有圆形的底座,所述底座外部位置等角度安装有三块防护板,所述防护板为弧形结构,所述底座与防护板之间位置安装有锥形弹簧,所述锥形弹簧一端与底座固定连接,另一端与防护板固定连接,所述锥形弹簧内部设置有滑杆和滑套,所述滑杆与滑套插接,所述滑杆另一端与防护板固定连接,所述滑套另一端与底座固定连接。
8.优选的,所述底座上部位置还通过固定杆安装有缓冲装置,所述缓冲装置包括与固定杆固定连接的支撑杆,所述支撑杆外部套设有缓冲弹簧,所述缓冲弹簧内腔靠近底座一侧与支撑杆焊接。
9.优选的,所述缓冲弹簧外部套设有防护套。
10.优选的,所述锥形弹簧外部套设有橡胶密封套。
11.(三)有益效果
12.本实用新型提供了一种变电站巡检机器人防破坏装置。具备以下有益效果:
13.(1)、机器人本体在巡视过程中,如果发生碰撞,如果处于较低处,则防护板首先会与碰撞物接触,然后作用锥形弹簧,锥形弹簧进行吸能,滑杆会被压入到滑套内,锥形弹簧复位时,滑杆也会随之复位。
14.(2)、机器人本体在巡视过程中,如果发生碰撞,如果处于高处,支撑杆外部套设的缓冲弹簧会起到吸能的作用。
附图说明
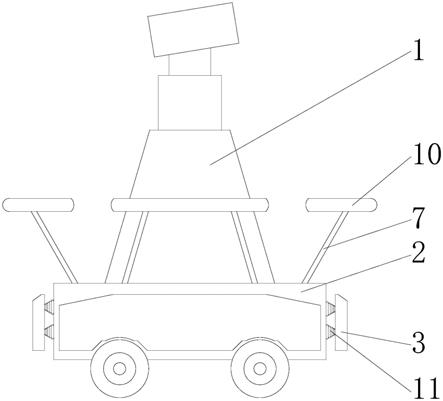
15.图1为本实用新型正视图;
16.图2为本实用新型俯视图;
17.图3为本实用新型缓冲装置结构图;
18.图4为本实用新型锥形弹簧与底座和防护板连接结构图。
19.图中:1、机器人本体;2、底座;3、防护板;4、锥形弹簧;5、滑杆;6、滑套;7、固定杆;8、支撑杆;9、缓冲弹簧;10、防护套;11、橡胶密封套。
具体实施方式
20.下面将结合本实用新型实施例中的附图,对本实用新型实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本实用新型一部分实施例,而不是全部的实施例。基于本实用新型中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本实用新型保护的范围。
21.如图1
‑
4所示,本实施例的变电站巡检机器人防破坏装置,包括机器人本体1,机器人本体1底部安装有圆形的底座2,底座2外部位置等角度安装有三块防护板3,防护板3为弧形结构,底座2与防护板3之间位置安装有锥形弹簧4,锥形弹簧4一端与底座2固定连接,另一端与防护板3固定连接,锥形弹簧4内部设置有滑杆5和滑套6,滑杆5与滑套6插接,滑杆5另一端与防护板3固定连接,滑套6另一端与底座2固定连接。机器人本体1在巡视过程中,如果发生碰撞,如果处于较低处,则防护板3首先会与碰撞物接触,然后作用锥形弹簧4,锥形弹簧4进行吸能,滑杆5会被压入到滑套6内,锥形弹簧4复位时,滑杆5也会随之复位。
22.进一步的,底座2上部位置还通过固定杆7安装有缓冲装置,缓冲装置包括与固定杆7固定连接的支撑杆8,支撑杆8外部套设有缓冲弹簧9,缓冲弹簧9内腔靠近底座2一侧与支撑杆8焊接。机器人本体1在巡视过程中,如果发生碰撞,如果处于高处,支撑杆8外部套设的缓冲弹簧9会起到吸能的作用,从而避免机器人本体1发生发生损坏。
23.进一步的,缓冲弹簧9外部套设有防护套10。
24.进一步的,锥形弹簧4外部套设有橡胶密封套11。
25.工作原理:机器人本体1在巡视过程中,如果发生碰撞,如果处于较低处,则防护板3首先会与碰撞物接触,然后作用锥形弹簧4,锥形弹簧4进行吸能,滑杆5会被压入到滑套6内,锥形弹簧4复位时,滑杆5也会随之复位,如果碰撞处于高处,支撑杆8外部套设的缓冲弹簧9会起到吸能的作用,从而避免机器人本体1发生发生损坏。
技术特征:
1.一种变电站巡检机器人防破坏装置,其特征在于:包括机器人本体(1),所述机器人本体(1)底部安装有圆形的底座(2),所述底座(2)外部位置等角度安装有三块防护板(3),所述防护板(3)为弧形结构,所述底座(2)与防护板(3)之间位置安装有锥形弹簧(4),所述锥形弹簧(4)一端与底座(2)固定连接,另一端与防护板(3)固定连接,所述锥形弹簧(4)内部设置有滑杆(5)和滑套(6),所述滑杆(5)与滑套(6)插接,所述滑杆(5)另一端与防护板(3)固定连接,所述滑套(6)另一端与底座(2)固定连接。2.根据权利要求1所述的一种变电站巡检机器人防破坏装置,其特征在于:所述底座(2)上部位置还通过固定杆(7)安装有缓冲装置,所述缓冲装置包括与固定杆(7)固定连接的支撑杆(8),所述支撑杆(8)外部套设有缓冲弹簧(9),所述缓冲弹簧(9)内腔靠近底座(2)一侧与支撑杆(8)焊接。3.根据权利要求2所述的一种变电站巡检机器人防破坏装置,其特征在于:所述缓冲弹簧(9)外部套设有防护套(10)。4.根据权利要求1所述的一种变电站巡检机器人防破坏装置,其特征在于:所述锥形弹簧(4)外部套设有橡胶密封套(11)。
技术总结
本实用新型涉及变电站巡检机器人技术领域,具体为一种变电站巡检机器人防破坏装置,包括机器人本体,机器人本体底部安装有圆形的底座,底座外部位置等角度安装有三块防护板,防护板为弧形结构,底座与防护板之间位置安装有锥形弹簧,锥形弹簧一端与底座固定连接,另一端与防护板固定连接,锥形弹簧内部设置有滑杆和滑套,滑杆与滑套插接,滑杆另一端与防护板固定连接,滑套另一端与底座固定连接,能够有效的对机器人进行防护,避免其发生损坏。避免其发生损坏。避免其发生损坏。
技术研发人员:方丽萍 杜林 刘恒旺 刘栋 李国要
受保护的技术使用者:安徽继远检验检测技术有限公司
技术研发日:2020.11.30
技术公布日:2021/11/28
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1