一种多抓取部机械手机构的制作方法
1.本实用新型涉及机械手制造加工技术领域,更具体的说涉及一种多抓取部机械手机构。
背景技术:
2.现有的机械手抓取机构一般只具有单个抓取装置,其只能逐一抓取,效果差,效果低,对于多条输送机构的生产线上,其需要多个独立的机械手抓取,其效果差,效率低。
技术实现要素:
3.本实用新型的目的就是针对现有技术之不足,而提供一种多抓取部机械手机构,它具有多个移动板,移动板上设有多个真空吸盘,其可以设置在多个输送机构上方进行抓取,其抓取效果好,效率高。
4.本实用新型的技术解决措施如下:
5.一种多抓取部机械手机构,包括门形架,所述门形架的上部横向梁的底面固定有多个横向轨道机构;
6.所述横向轨道机构包括两个前后延伸的长形梁,其中一个长形梁的内侧壁上固定有长形齿条,两个长形梁的外侧壁上均固定有导向条,导向条的底面中部成型有长形槽,长形槽的顶面成型有上凹槽,上凹槽的宽度大于长形槽的宽度;
7.所述横向轨道机构的正下方设有移动板,移动板的中部底面固定有驱动电机,驱动电机的输出轴穿过移动板的顶面并固定有驱动齿轮,驱动齿轮处于两个长形梁之间并与长形齿条相啮合;
8.所述移动板的顶面的左部和右部均固定有导向块,导向块插套在长形槽中,导向块顶面固定有滑动块,滑动块插套在上凹槽中,滑动块的底面紧贴上凹槽的底面;
9.所述移动板的底面固定有下支撑架,下支撑架的底板的中部顶面固定有升降油缸,升降油缸的推杆穿过下支撑架的底板的底面并固定有抓取升降板,抓取升降板的底面固定有多个真空吸盘。
10.所述抓取升降板的顶面固定有多个竖直导向杆,竖直导向杆插套在下支撑架的底板上具有的竖直通孔中。
11.所述竖直通孔的内侧壁上固定有内导向套,竖直导向杆插套在内导向套中。
12.所述门形架包括两个上部横向梁,上部横向梁的两端底面固定有竖直支腿。
13.所述竖直支腿的底面固定有下固定板。
14.所述两个长形梁的相对壁面的下部均成型有延伸凸起部,驱动电机的输出轴的上部插套在两个延伸凸起部之间。
15.本实用新型的有益效果在于:
16.它具有多个移动板,移动板上设有多个真空吸盘,其可以设置在多个输送机构上方进行抓取,其抓取效果好,效率高。
附图说明
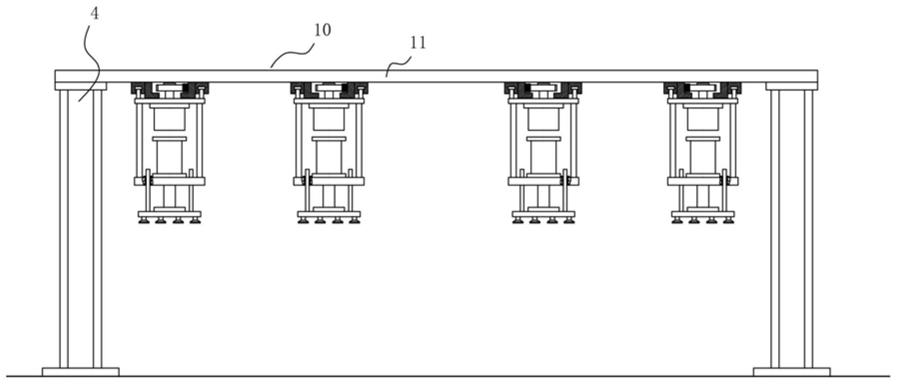
17.图1为本实用新型的局部结构示意图;
18.图2为图1的局部放大图;
19.图3为本实用新型的局部俯视图。
具体实施方式
20.实施例:见图1至图3所示,一种多抓取部机械手机构,包括门形架10,所述门形架10的上部横向梁11的底面固定有多个横向轨道机构20;
21.所述横向轨道机构20包括两个前后延伸的长形梁21,其中一个长形梁21的内侧壁上固定有长形齿条22,两个长形梁21的外侧壁上均固定有导向条23,导向条23的底面中部成型有长形槽231,长形槽231的顶面成型有上凹槽232,上凹槽232的宽度大于长形槽231的宽度;
22.所述横向轨道机构20的正下方设有移动板24,移动板24的中部底面固定有驱动电机25,驱动电机25的输出轴穿过移动板24的顶面并固定有驱动齿轮26,驱动齿轮26处于两个长形梁21之间并与长形齿条22相啮合;
23.所述移动板24的顶面的左部和右部均固定有导向块27,导向块27插套在长形槽231中,导向块27顶面固定有滑动块28,滑动块28插套在上凹槽232中,滑动块28的底面紧贴上凹槽232的底面;
24.所述移动板24的底面固定有下支撑架29,下支撑架29的底板的中部顶面固定有升降油缸30,升降油缸30的推杆穿过下支撑架29的底板的底面并固定有抓取升降板31,抓取升降板31的底面固定有多个真空吸盘32。
25.进一步的说,所述抓取升降板31的顶面固定有多个竖直导向杆1,竖直导向杆1插套在下支撑架29的底板上具有的竖直通孔中。
26.进一步的说,所述竖直通孔的内侧壁上固定有内导向套2,竖直导向杆1插套在内导向套2中。
27.进一步的说,所述门形架10包括两个上部横向梁11,上部横向梁11的两端底面固定有竖直支腿4。
28.进一步的说,所述竖直支腿4的底面固定有下固定板5。
29.进一步的说,所述两个长形梁21的相对壁面的下部均成型有延伸凸起部211,驱动电机25的输出轴的上部插套在两个延伸凸起部211之间。
30.本实施例中,在使用时,将其安装在多个输送机构处,其每个抓取升降板31处于对应的输送机构的正上方,通过升降油缸30的推杆推动,可以将抓取升降板31下降,使得多个真空吸盘32下降并压靠在输送机构上的物料上,将吸附,然后,通过升降油缸30的推杆回缩,然后,通过驱动电机25运行,可以实现物料前后移动,将其移动至对应的位置,然后,通过升降油缸30的推杆推动,将物料放置在对应的位置上,关闭真空吸盘即可,抓取输送效果好,效率高。
31.其可以一次对多个物料进行抓取取料,其效果好。
技术特征:
1.一种多抓取部机械手机构,包括门形架(10),其特征在于:所述门形架(10)的上部横向梁(11)的底面固定有多个横向轨道机构(20);所述横向轨道机构(20)包括两个前后延伸的长形梁(21),其中一个长形梁(21)的内侧壁上固定有长形齿条(22),两个长形梁(21)的外侧壁上均固定有导向条(23),导向条(23)的底面中部成型有长形槽(231),长形槽(231)的顶面成型有上凹槽(232),上凹槽(232)的宽度大于长形槽(231)的宽度;所述横向轨道机构(20)的正下方设有移动板(24),移动板(24)的中部底面固定有驱动电机(25),驱动电机(25)的输出轴穿过移动板(24)的顶面并固定有驱动齿轮(26),驱动齿轮(26)处于两个长形梁(21)之间并与长形齿条(22)相啮合;所述移动板(24)的顶面的左部和右部均固定有导向块(27),导向块(27)插套在长形槽(231)中,导向块(27)顶面固定有滑动块(28),滑动块(28)插套在上凹槽(232)中,滑动块(28)的底面紧贴上凹槽(232)的底面;所述移动板(24)的底面固定有下支撑架(29),下支撑架(29)的底板的中部顶面固定有升降油缸(30),升降油缸(30)的推杆穿过下支撑架(29)的底板的底面并固定有抓取升降板(31),抓取升降板(31)的底面固定有多个真空吸盘(32)。2.根据权利要求1所述一种多抓取部机械手机构,其特征在于:所述抓取升降板(31)的顶面固定有多个竖直导向杆(1),竖直导向杆(1)插套在下支撑架(29)的底板上具有的竖直通孔中。3.根据权利要求2所述一种多抓取部机械手机构,其特征在于:所述竖直通孔的内侧壁上固定有内导向套(2),竖直导向杆(1)插套在内导向套(2)中。4.根据权利要求1所述一种多抓取部机械手机构,其特征在于:所述门形架(10)包括两个上部横向梁(11),上部横向梁(11)的两端底面固定有竖直支腿(4)。5.根据权利要求4所述一种多抓取部机械手机构,其特征在于:所述竖直支腿(4)的底面固定有下固定板(5)。6.根据权利要求1所述一种多抓取部机械手机构,其特征在于:所述两个长形梁(21)的相对壁面的下部均成型有延伸凸起部(211),驱动电机(25)的输出轴的上部插套在两个延伸凸起部(211)之间。
技术总结
本实用新型公开了一种多抓取部机械手机构,包括门形架,所述门形架的上部横向梁的底面固定有多个横向轨道机构;所述横向轨道机构包括两个前后延伸的长形梁,其中一个长形梁的内侧壁上固定有长形齿条,两个长形梁的外侧壁上均固定有导向条,导向条的底面中部成型有长形槽,长形槽的顶面成型有上凹槽,上凹槽的宽度大于长形槽的宽度;它具有多个移动板,移动板上设有多个真空吸盘,其可以设置在多个输送机构上方进行抓取,其抓取效果好,效率高。效率高。效率高。
技术研发人员:付小东
受保护的技术使用者:四川美多宝新材料科技有限公司
技术研发日:2020.12.07
技术公布日:2021/9/28
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1