仿真送餐机器人托盘传感支撑机构的制作方法
1.本实用新型涉及送餐机器人技术领域,具体而言,涉及仿真送餐机器人托盘传感支撑机构。
背景技术:
2.随着现代工业化进程的加快,人们对生活中物质文化需求的增多,机器人也渐渐走入了人们的生活之中。现在的餐饮行业多是以人力进行送餐等服务,工作强度较高,对劳动人员的精神及体力无疑是一种严峻的考验,人员工资投入亦较大。因此,很多餐厅开始使用送餐机器人。但是,一般的送餐机器人托盘支架部分为机械设备造型设计,样式较为生硬,亦无法稳定感知托盘上是否具有菜品,产品质量存在较大的提升空间。
技术实现要素:
3.为了解决一般的送餐机器人的托盘支架部分样式生硬,无法稳定感知托盘上是否具有菜品,用户使用体验较差的问题,提供仿真送餐机器人托盘传感支撑机构。
4.仿真送餐机器人托盘传感支撑机构,包括底盘,所述底盘上安装有竖立支架,所述竖立支架的左右两端均连接有l型支撑杆的顶端,左右两端的l型支撑杆的末端之间水平设置有菜品托盘,所述菜品托盘上设置有菜品传感器,所述l型支撑杆上还套设有仿真手臂层。
5.进一步地,所述底盘的外侧安装有裙摆支架。
6.进一步地,所述裙摆支架包括梯形围板,所以梯形围板的横截面积从上至下逐渐增大。
7.进一步地,所述竖立支架至裙摆支架的外侧套设有仿真裙摆。
8.进一步地,所述菜品传感器包括对称设置于菜品托盘左右两端的光栅发射端和光栅接收端。
9.进一步地,所述菜品托盘的底部的四个角点与l型支撑杆之间均连接有竖直支杆。
10.本实用新型的优点在于:
11.1、支撑结构模仿服务员手端托盘的姿势,外形亲和力较强,可提升用户接受度。
12.2、l型支撑杆可稳定支撑托盘,稳固度高。
13.3、结构简单,设备成本低,便于推广应用。
附图说明
14.为了更清楚地说明本实用新型实施例或现有技术中的技术方案,下面将对实施例或现有技术描述中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本实用新型的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他的附图。
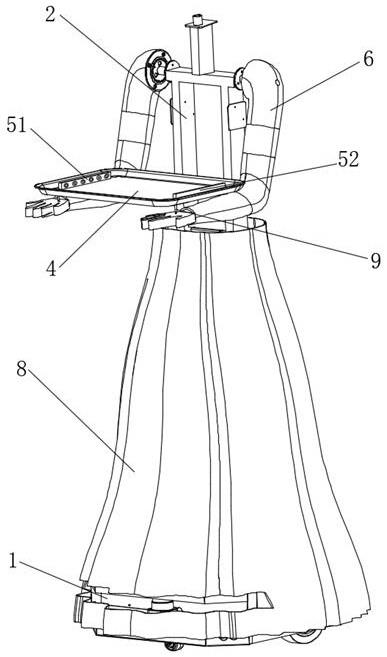
15.图1为仿真送餐机器人托盘传感支撑机构的结构示意图;
16.图2为仿真送餐机器人托盘传感支撑机构除去一侧的仿真手臂层和仿真裙摆后的结构示意图。
17.附图标识:
[0018]1‑
底盘,2
‑
竖立支架,3
‑
l型支撑杆,4
‑
菜品托盘,51
‑
光栅发射端,52
‑
光栅接收端,6
‑
仿真手臂层,7
‑
裙摆支架,8
‑
仿真裙摆,9
‑
竖直支杆。
具体实施方式
[0019]
为了解决一般的送餐机器人的托盘支架部分样式生硬,无法稳定感知托盘上是否具有菜品,用户使用体验较差的问题,提供仿真送餐机器人托盘传感支撑机构。
[0020]
为了使本实用新型实施例的目的、技术方案和优点更加清楚,下面将结合本实用新型实施例中的附图,对本实用新型实施例中的技术方案进行清楚、完整的描述,显然,所描述的实施例是本实用新型的一部分实施例,而不是全部的实施例。基于本实用新型中的实施例,本领域普通技术人员在没有做出创造性劳动前提下获得的所有其他实施例,都属于本实用新型保护的范围。
[0021]
如图1和2所示,本实施例提供仿真送餐机器人托盘传感支撑机构,包括底盘1,所述底盘1上安装有竖立支架2,所述竖立支架2的左右两端均连接有l型支撑杆3的顶端,左右两端的l型支撑杆3的末端之间水平设置有菜品托盘4,所述菜品托盘4上设置有菜品传感器,所述l型支撑杆3上还套设有仿真手臂层6。l型支撑杆3可为菜品托盘4提供稳定支撑;菜品传感器设置于菜品托盘4上可快速直观地感应菜品的放入和取出,方便了连接外部控制模块对送餐机器人实现自动控制;仿真手臂层6模拟真人手臂,可提高设备的外观亲和力,改善用户体验。
[0022]
所述底盘1的外侧安装有裙摆支架7。裙摆支架7方便了在底盘外侧安装裙摆等外部遮挡材料,使用户在无法透过外部遮挡材料看到送餐机器人的内部结构,可提高设备的外形美观度。
[0023]
所述裙摆支架7包括梯形围板,所以梯形围板的横截面积从上至下逐渐增大。所述竖立支架2至裙摆支架7的外侧套设有仿真裙摆8。仿真裙摆8可采用一般女性的长裙等样式,可遮挡住送餐机器人的内部机械结构,提高用户接受度;而梯形的裙摆支架7可为仿真裙摆8提供支撑,使仿真裙摆8自然撑开,保证设备的外观美观自然。
[0024]
所述菜品传感器包括对称设置于菜品托盘4左右两端的光栅发射端51和光栅接收端52。在菜品托盘4表面设置了横向的光栅,菜品放置在菜品托盘4的任何位置均可触发传感,有效保证了感应效果。光栅发射端51和光栅接收端52电性连接送餐机器人的控制模块。由于本方案只改进了传感器的布置方式,而送餐机器人采用的控制模块在市面上早已公开,因此不作赘述。
[0025]
所述菜品托盘4的底部的四个角点与l型支撑杆3之间均连接有竖直支杆9。
[0026]
以上内容是结合具体的优选实施方式对本实用新型所作的进一步详细说明,不能认定本实用新型的具体实施只局限于这些说明,即凡依本申请范围所作均等变化与修饰,皆应仍属本实用新型涵盖范围内。
技术特征:
1.仿真送餐机器人托盘传感支撑机构,包括底盘,所述底盘上安装有竖立支架,其特征在于,所述竖立支架的左右两端均连接有l型支撑杆的顶端,左右两端的l型支撑杆的末端之间水平设置有菜品托盘,所述菜品托盘上设置有菜品传感器,所述l型支撑杆上还套设有仿真手臂层。2.根据权利要求1所述的仿真送餐机器人托盘传感支撑机构,其特征在于,所述底盘的外侧安装有裙摆支架。3.根据权利要求2所述的仿真送餐机器人托盘传感支撑机构,其特征在于,所述裙摆支架包括梯形围板,所以梯形围板的横截面积从上至下逐渐增大。4.根据权利要求2所述的仿真送餐机器人托盘传感支撑机构,其特征在于,所述竖立支架至裙摆支架的外侧套设有仿真裙摆。5.根据权利要求1所述的仿真送餐机器人托盘传感支撑机构,其特征在于,所述菜品传感器包括对称设置于菜品托盘左右两端的光栅发射端和光栅接收端。6.根据权利要求1所述的仿真送餐机器人托盘传感支撑机构,其特征在于,所述菜品托盘的底部的四个角点与l型支撑杆之间均连接有竖直支杆。
技术总结
本实用新型属于送餐机器人技术领域,具体涉及仿真送餐机器人托盘传感支撑机构,包括底盘,所述底盘上安装有竖立支架,所述竖立支架的左右两端均连接有L型支撑杆的顶端,左右两端的L型支撑杆的末端之间水平设置有菜品托盘,所述菜品托盘上设置有菜品传感器,所述L型支撑杆上还套设有仿真手臂层。本实用新型通过模仿服务员手部端起托盘的样式重新设计了送餐机械人的托盘支撑机构,可稳定地放置菜品并提高用户对自动送餐设备的接受度,具有显著的实用意义。实用意义。实用意义。
技术研发人员:周建军 陈韶忠 李苏文
受保护的技术使用者:广州仿真机器人有限公司
技术研发日:2020.12.10
技术公布日:2021/9/21
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1