自动可调式夹取治具的制作方法
1.本实用新型涉及散热器的夹取治具领域,尤其涉及一种自动可调式夹取治具。
背景技术:
2.目前,散热器的组装的生产,是通过流水线的方式作业的,在生产加工的过程中,需要将流水线上的成品散热器移载至检测设备中进行全面外观尺寸缺陷检测,检测完后又需要将产品移载回流水线,目前的方式是通过机械手移载散热器。但是由于散热器种类多,不同种类的散热器的重量和宽度差异较大,这就需要很多不同的机械手来移载不同尺寸和种类的散热器,不仅使用成本高,每次移载不同的散热器时,还需要对应更换不同的机械手,操作麻烦,耗费时间多,影响了生产的连续性。
技术实现要素:
3.为了解决上述问题,本实用新型向社会提供一种能够用于夹取不同的种类和尺寸的散热器的通用性更强的自动可调式夹取治具。
4.本实用新型的技术方案是:提供一种自动可调式夹取治具,包括底座、设置在底座上的四轴机械手、以及位于四轴机械手上的连接底板,所述连接底板上设有丝杆模组、伺服电机和弹性夹爪,所述伺服电机用于驱动所述丝杆模组作直线运动,所述弹性夹爪随所述丝杆模组直线运动从而实现夹取或者松开工件。
5.作为本实用新型的改进,所述四轴机械手包括x轴运动单元、y轴运动单元、z轴运动单元和c轴运动单元,所述x轴运动单元、y轴运动单元和z轴运动单元是旋转运动,所述c轴运动单元是竖直方向运动。
6.作为本实用新型的改进,所述弹性夹爪包括第一夹料板、第二夹料板和合成橡胶,所述第一夹料板位于所述丝杆模组上,所述第二夹料板位于所述连接底板,所述第一夹料板在所述丝杆模组的作用下可相对于所述第二夹料板移动,从而实现夹紧或者松开工件,所述合成橡胶位于所述第一夹料板和/或第二夹料板的内壁。
7.作为本实用新型的改进,还包括光电开关。
8.作为本实用新型的改进,所述丝杆模组包括丝杆、与丝杆匹配安装的螺母、位于螺母上的滑块、所述滑块配合的导轨、以及同步轮和同步带,所述同步轮与所述伺服电机连接,所述伺服电机通过同步轮和同步带从而带动所述丝杆运动。
9.本实用新型由于包括底座、设置在底座上的四轴机械手、以及位于四轴机械手上的连接底板,所述连接底板上设有丝杆模组、伺服电机和弹性夹爪,所述伺服电机用于驱动所述丝杆模组作直线运动,所述弹性夹爪随所述丝杆模组直线运动从而实现夹取或者松开工件。本实用新型在使用时,四轴机械手可完成一定重量以内的产品移载,四轴机械手通过三个旋转轴加一个升降轴实现对不同重量产品x轴、y轴、z轴和c轴各方向上的移动运载;所述电机控制丝杆模组完成直线往复运动,丝杆模组从而带动弹性夹爪进行夹料和松开动作,从而实现不同尺寸的种类和尺寸的散热器的夹取,通用性更强。因此,本实用新型具有
能够用于夹取不同的种类和尺寸的散热器的,其通用性更强的优点。
附图说明
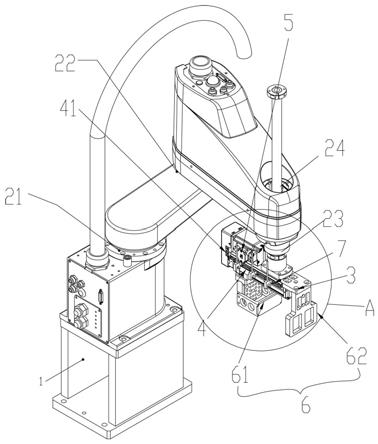
10.图1是本实用新型的一种实施例的立体结构示意图。
11.图2是图1中的a处的放大结构示意图。
12.图3是图1的侧视示意图。
具体实施方式
13.请参见图1至图3,图1至图3揭示的是自动可调式夹取治具,的一种实施方式,一种自动可调式夹取治具,包括底座1、设置在底座1上的四轴机械手2、以及位于四轴机械手2上的连接底板3,所述连接底板3上设有丝杆模组4、伺服电机5和弹性夹爪6,所述伺服电机5用于驱动所述丝杆模组4作直线运动,所述弹性夹爪6随所述丝杆模组4直线运动从而实现夹取或者松开工件。本实用新型在使用时,四轴机械手2可完成一定重量以内的产品移载,所述四轴机械手2通过三个旋转轴加一个升降轴实现对不同重量产品x轴、y轴、z轴和c轴各方向上的移动运载;所述伺服电机5控制丝杆模组4完成直线往复运动,所述丝杆模组4从而带动弹性夹爪6进行夹料和松开动作,从而实现不同尺寸的种类和尺寸的散热器的夹取,通用性更强。
14.本实用新型中,优选的,所述四轴机械手2包括x轴运动单元21、y轴运动单元22、z轴运动单元23和c轴运动单元24,所述x轴运动单元21、y轴运动单元22和z轴运动单元23是旋转运动,所述c轴运动单元24是竖直方向运动。
15.本实用新型中,优选的, 所述弹性夹爪6包括第一夹料板61、第二夹料板62和合成橡胶,所述第一夹料板61位于所述丝杆模组4上,所述第二夹料板62位于所述连接底板3,所述第一夹料板61在所述丝杆模组4的作用下可相对于所述第二夹料板62移动,从而实现不同尺寸和种类的工件的夹紧或者松开,所述合成橡胶位于所述第一夹料板61和/或第二夹料板62的内壁,使用时,所述合成橡胶与产品直接接触,起到增加摩擦力和防止对工件表面造成二次伤害的作用;本实用新型中,所述第二夹料板62可以根据需要由多个分料板组成。
16.本实用新型中,优选的,还包括光电开关7,光电开关7的结构属于现有技术,此处不再一一赘述。本实用新型中,优选的,所述丝杆模组4包括丝杆、与丝杆匹配安装的螺母、位于螺母上的滑块、所述滑块配合的导轨、以及同步轮41和同步带,所述同步轮与所述伺服电机5连接,所述伺服电机5通过同步轮和同步带从而带动所述丝杆运动。
技术特征:
1.一种自动可调式夹取治具,其特征在于:包括底座(1)、设置在底座(1)上的四轴机械手(2)、以及位于四轴机械手(2)上的连接底板(3),所述连接底板(3)上设有丝杆模组(4)、伺服电机(5)和弹性夹爪(6),所述伺服电机(5)用于驱动所述丝杆模组(4)作直线运动,所述弹性夹爪(6)随所述丝杆模组(4)直线运动从而实现夹取或者松开工件。2.根据权利要求1所述的自动可调式夹取治具,其特征在于:所述四轴机械手(2)包括x轴运动单元(21)、y轴运动单元(22)、z轴运动单元(23)和c轴运动单元(24),所述x轴运动单元(21)、y轴运动单元(22)和z轴运动单元(23)是旋转运动,所述c轴运动单元(24)是竖直方向运动。3.根据权利要求1或2所述的自动可调式夹取治具,其特征在于: 所述弹性夹爪(6)包括第一夹料板(61)、第二夹料板(62)和合成橡胶,所述第一夹料板(61)位于所述丝杆模组(4)上,所述第二夹料板(62)位于所述连接底板(3),所述第一夹料板(61)在所述丝杆模组(4)的作用下可相对于所述第二夹料板(62)移动,从而实现夹紧或者松开工件,所述合成橡胶位于所述第一夹料板(61)和/或第二夹料板(62)的内壁。4.根据权利要求1或2所述的自动可调式夹取治具,其特征在于:还包括光电开关(7)。5.根据权利要求1或2所述的自动可调式夹取治具,其特征在于:所述丝杆模组(4)包括丝杆、与丝杆匹配安装的螺母、位于螺母上的滑块、所述滑块配合的导轨、以及同步轮(41)和同步带,所述同步轮与所述伺服电机(5)连接,所述伺服电机(5)通过同步轮和同步带从而带动所述丝杆运动。
技术总结
一种自动可调式夹取治具,包括底座、设置在底座上的四轴机械手、以及位于四轴机械手上的连接底板,所述连接底板上设有丝杆模组、伺服电机和弹性夹爪,所述伺服电机用于驱动所述丝杆模组作直线运动,所述弹性夹爪随所述丝杆模组直线运动从而实现夹取或者松开工件。本实用新型具有能够用于夹取不同的种类和尺寸的散热器,其通用性更强的优点。散热器,其通用性更强的优点。散热器,其通用性更强的优点。
技术研发人员:周继强 张庆祥 谭辉 陈英滔 郑晓泽 唐小琦 李振瀚 周向东 卢少武
受保护的技术使用者:广东三姆森科技股份有限公司
技术研发日:2020.12.29
技术公布日:2021/9/24
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1