一种多传感器信息融合的智能机器人导航装置的制作方法
1.本实用新型涉及智能机器人技术领域,尤其涉及一种多传感器信息融合的智能机器人导航装置。
背景技术:
2.智能机器人是一种能够半自主或全自主工作的智能机器,具有感知、决策、执行等基本特征,可以辅助甚至替代人类完成危险、繁重、复杂的工作,提高工作效率与质量,服务人类生活,扩大或延伸人的活动及能力范围。
3.现有的智能机器人导航装置的安装和拆卸很麻烦,不便于定期维护和检修,不利于延长装置的使用寿命;其次,现有的导航装置导线接头处容易松动甚至脱落,造成接触不良的现象,导致设备直接关机,对设备本身造成损害,为此我们提出了一种多传感器信息融合的智能机器人导航装置来解决上述问题。
技术实现要素:
4.本实用新型的目的是为了解决现有技术中存在问题,而提出的一种多传感器信息融合的智能机器人导航装置。
5.为了实现上述目的,本实用新型采用了如下技术方案:
6.一种多传感器信息融合的智能机器人导航装置,包括包括安装座、导航装置本体和导线头,所述安装座顶部固定连接有两个呈对称设置的固定板,所述导航装置本体侧壁开设有与固定板相对应的安装槽,所述固定板连接有固定机构,所述导航装置本体侧壁连接有接线柱插孔,所述导航装置本体侧壁开设有与导线头相对应的导线槽,所述导线头外侧壁固定连接有连接块,所述连接块外侧壁连接有导线,所述连接块连接有限位机构。
7.优选地,所述固定机构包括开设在固定板上的滑动口,所述滑动口内侧壁滑动连接有卡销,所述安装槽内底部开设有与卡销相适配的卡槽。
8.优选地,所述卡销外侧壁套设有复位弹簧,所述复位弹簧两端分别与固定板外侧壁和卡销外侧壁固定连接。
9.优选地,所述限位机构包括开设在连接块顶部的固定槽,所述固定槽相对一侧内侧壁均固定连接有同一根转动杆,所述转动杆外侧壁转动套接有呈“l”型设置的插板,所述插板顶部固定连接有呈球状设置的限位块。
10.优选地,所述连接块顶部与插板外侧壁均固定连接有同一根伸缩弹簧,所述伸缩弹簧弹性系数大,用于限位安全可靠。
11.优选地,所述导航装置本体侧壁开设有与插板和限位块相对应的插入槽,所述插入槽内侧壁开设有限位腔,所述限位腔与限位块相适配。
12.本实用新型与现有技术相比具有以下优点:
13.1、本实用新型通过安装座、导航装置本体、固定机构、复位弹簧和卡槽的配合使用,使得导航装置本体更加便于安装和拆卸,且固定牢固,不会发生偏移和晃动现象,方便
操作人员对其进行维护和检修,有利于延长装置的使用寿命,提高了装置的实用性。
14.2、本实用新型通过导线槽、导线头、连接块、导线、插入槽和限位机构的配合使用,使得导航装置本体与导线接头处连接更加稳定,防止松动或者脱落,避免了传统技术中导线接头处容易松动的现象,有利于保护设备正常使用。
附图说明
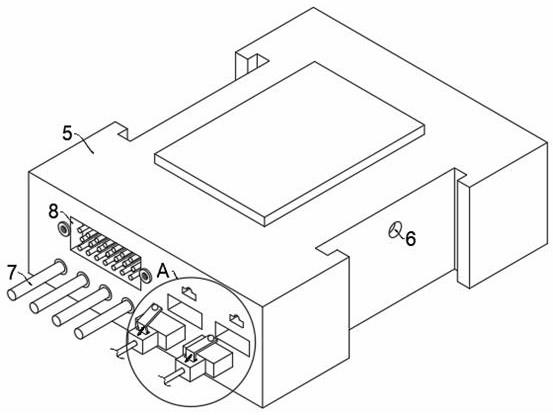
15.图1为本实用新型提出的一种多传感器信息融合的智能机器人导航装置的结构示意图;
16.图2为本实用新型提出的一种多传感器信息融合的智能机器人导航装置中安装座和固定机构的结构示意图;
17.图3为本实用新型提出的一种多传感器信息融合的智能机器人导航装置中“a”处结构的结构示意图。
18.图中:1、安装座;2、固定板;3、卡销;4、复位弹簧;5、导航装置本体;6、卡槽;7、接线柱;8、插孔;9、导线槽;10、导线头;11、连接块;12、导线;13、插板;14、限位块;15、伸缩弹簧;16、插入槽。
具体实施方式
19.参照图1-3,一种多传感器信息融合的智能机器人导航装置,包括安装座1、导航装置本体5和导线头10,安装座1顶部固定连接有两个呈对称设置的固定板2,导航装置本体5侧壁开设有与固定板2相对应的安装槽,固定板2连接有固定机构,固定机构包括开设在固定板2上的滑动口,滑动口内侧壁滑动连接有卡销3,卡销3外侧壁套设有复位弹簧4,复位弹簧4两端分别与固定板2外侧壁和卡销3外侧壁固定连接,安装槽内底部开设有与卡销3相适配的卡槽6,通过固定机构和安装槽的配合使用,使得导航装置本体5的固定变得简单快速,提高了装置的稳定性,且便于维护和检修,有利于延长装置的使用寿命;
20.导航装置本体5侧壁连接有接线柱7插孔8,导航装置本体5侧壁开设有与导线头10相对应的导线槽9,导线头10外侧壁固定连接有连接块11,连接块11外侧壁连接有导线12,连接块11连接有限位机构,限位机构包括开设在连接块11顶部的固定槽,固定槽相对一侧内侧壁均固定连接有同一根转动杆,转动杆外侧壁转动套接有呈“l”型设置的插板13,连接块11顶部与插板13外侧壁均固定连接有同一根伸缩弹簧15,伸缩弹簧15弹性系数大,用于限位安全可靠,使用伸缩弹簧15,使得插板13可以旋转并自动复位;
21.插板13顶部固定连接有呈球状设置的限位块14,导航装置本体5侧壁开设有与插板13和限位块14相对应的插入槽16,插入槽16内侧壁开设有限位腔,限位腔与限位块14相适配,通过限位机构,实现对导线头10的固定,防止导线头10在设备工作时松动甚至脱落,有效避免设备意外关机,有利于延长装置的使用寿命,提高了装置的实用性。
22.本实用新型具体工作原理如下:
23.初始状态下,先将两个卡销3向外拔出,使得复位弹簧4压缩,再将导航装置本体5两侧的安装槽对准安装座1顶部的固定板2并卡入,松开卡销3,此时复位弹簧4复位,带动卡销3卡入卡槽6中,从而实现将导航装置本体5固定稳定,不会在工作时发生晃动或者偏移,且装卸简单快速,便于定期维护和检修,有利于延长装置使用寿命;
24.当需要连接导线12时,先按压插板13,带动伸缩弹簧15伸长,将插板13和限位块14对准插入槽16,并将其推入插入槽16,待到导线头10完全进入导线槽9中时,插板13也插入到插入槽16的最底部,此时停止按压插板13,使得伸缩弹簧15复位,将插板13弹起,从而使得限位块14卡进限位腔中,实现对导线头10的固定,防止导线头10在设备工作时松动或者脱落,有效避免设备意外关机,有利于延长装置的使用寿命,提高了装置的实用性。
25.以上所述,仅为本实用新型较佳的具体实施方式,但本实用新型的保护范围并不局限于此,任何熟悉本技术领域的技术人员在本实用新型揭露的技术范围内,根据本实用新型的技术方案及其实用新型构思加以等同替换或改变,都应涵盖在本实用新型的保护范围之内。
技术特征:
1.一种多传感器信息融合的智能机器人导航装置,包括安装座(1)、导航装置本体(5)和导线头(10),其特征在于,所述安装座(1)顶部固定连接有两个呈对称设置的固定板(2),所述导航装置本体(5)侧壁开设有与固定板(2)相对应的安装槽,所述固定板(2)连接有固定机构,所述导航装置本体(5)侧壁连接有接线柱(7)插孔(8),所述导航装置本体(5)侧壁开设有与导线头(10)相对应的导线槽(9),所述导线头(10)外侧壁固定连接有连接块(11),所述连接块(11)外侧壁连接有导线(12),所述连接块(11)连接有限位机构。2.根据权利要求1所述的一种多传感器信息融合的智能机器人导航装置,其特征在于,所述固定机构包括开设在固定板(2)上的滑动口,所述滑动口内侧壁滑动连接有卡销(3),所述安装槽内底部开设有与卡销(3)相适配的卡槽(6)。3.根据权利要求2所述的一种多传感器信息融合的智能机器人导航装置,其特征在于,所述卡销(3)外侧壁套设有复位弹簧(4),所述复位弹簧(4)两端分别与固定板(2)外侧壁和卡销(3)外侧壁固定连接。4.根据权利要求1所述的一种多传感器信息融合的智能机器人导航装置,其特征在于,所述限位机构包括开设在连接块(11)顶部的固定槽,所述固定槽相对一侧内侧壁均固定连接有同一根转动杆,所述转动杆外侧壁转动套接有呈“l”型设置的插板(13),所述插板(13)顶部固定连接有呈球状设置的限位块(14)。5.根据权利要求4所述的一种多传感器信息融合的智能机器人导航装置,其特征在于,所述连接块(11)顶部与插板(13)外侧壁均固定连接有同一根伸缩弹簧(15),所述伸缩弹簧(15)弹性系数大,用于限位安全可靠。6.根据权利要求4所述的一种多传感器信息融合的智能机器人导航装置,其特征在于,所述导航装置本体(5)侧壁开设有与插板(13)和限位块(14)相对应的插入槽(16),所述插入槽(16)内侧壁开设有限位腔,所述限位腔与限位块(14)相适配。
技术总结
本实用新型公开了一种多传感器信息融合的智能机器人导航装置,包括包括安装座、导航装置本体和导线头,所述安装座顶部固定连接有两个呈对称设置的固定板,所述导航装置本体侧壁开设有与固定板相对应的安装槽,所述固定板连接有固定机构,所述导航装置本体侧壁连接有接线柱插孔,所述导航装置本体侧壁开设有与导线头相对应的导线槽,所述导线头外侧壁固定连接有连接块。本实用新型通过安装座、导航装置本体、固定机构、复位弹簧和卡槽的配合使用,使得导航装置本体更加便于安装和拆卸,且固定牢固,不会发生偏移和晃动现象,方便操作人员对其进行维护和检修,有利于延长装置的使用寿命,提高了装置的实用性。提高了装置的实用性。提高了装置的实用性。
技术研发人员:吴其明 潘劲松 马勇杰 谭祖欢 庞宇
受保护的技术使用者:海力德工业(湛江)有限公司
技术研发日:2021.06.04
技术公布日:2022/1/18
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1