一种产品自动取放定位机构及搬运机器人的制作方法
1.本实用新型涉及机器人技术领域,特别涉及一种产品自动取放定位机构及搬运机器人。
背景技术:
2.搬运机器人上通常会安装夹手,通过夹手对产品进行夹持,传统的夹手大都采用仿产品外形,通过左右或者上下抱取产品方式来搬运产品,产品在搬运过程中经常会出现相对夹手活动等情况,特别对于塑料件产品或者含有玻璃配件的产品,在搬运过程中容易导致产品变形或损坏。因此,上述问题急需解决。
技术实现要素:
3.本实用新型要解决的技术问题是提供一种结构合理、可对产品进行定位,避免产品损伤自动取放定位机构。
4.为了解决上述问题,本实用新型提供了一种产品自动取放定位机构,可装配在机械手上,其包括本体,所述本体上设有:
5.用于相互配合对产品进行定位的两个定位组件,所述定位组件包括定位销、驱动源,所述驱动源与所述定位销连接;所述驱动源可驱动所述定位销进入产品上的定位孔内,在夹取装置对产品进行夹取前对产品进行定位,并在产品取放过程中随夹取装置同步运动。
6.作为本实用新型的进一步改进,所述定位组件还包括定位块,所述定位块上设有与所述定位销配合的通孔,所述驱动源可驱动所述定位销进入所述通孔,并贯穿所述通孔进入产品上的定位孔内。
7.作为本实用新型的进一步改进,所述通孔内设有与所述定位销配合的定位套筒。
8.作为本实用新型的进一步改进,所述定位块上设有螺丝孔,所述螺丝孔贯穿所述定位块至所述通孔内,螺丝可通过所述螺丝孔将所述定位套筒固定在所述通孔内。
9.作为本实用新型的进一步改进,所述定位块与所述定位孔周围的形状匹配。
10.作为本实用新型的进一步改进,所述本体包括两个对称的固定部、连接两个固定部的连接部,所述连接部和两个固定部形成u型,两个定位组件分别装配于两个固定部上。
11.作为本实用新型的进一步改进,所述连接部和两个固定部一体成型。
12.作为本实用新型的进一步改进,所述驱动源包括伸缩气缸,所述定位销通过压块与所述伸缩气缸连接。
13.作为本实用新型的进一步改进,所述定位销的前端为锥形。
14.为了解决上述问题,本实用新型还提供了一种搬运机器人,包括机械手,所述机械手上装配有上述任一所述的产品自动取放定位机构。
15.本实用新型的有益效果:
16.本实用新型产品自动取放定位机构通过定位组件对产品进行定位,在机械手上的
夹取装置对产品进行夹取前对产品进行定位,并在产品取放过程中随夹取装置同步运动,避免产品相对夹取装置运动,增加产品在搬运过程中的稳定性,可有效避免产品在搬运过程中出现损伤。
17.上述说明仅是本实用新型技术方案的概述,为了能够更清楚了解本实用新型的技术手段,而可依照说明书的内容予以实施,并且为了让本实用新型的上述和其他目的、特征和优点能够更明显易懂,以下特举较佳实施例,并配合附图,详细说明如下。
附图说明
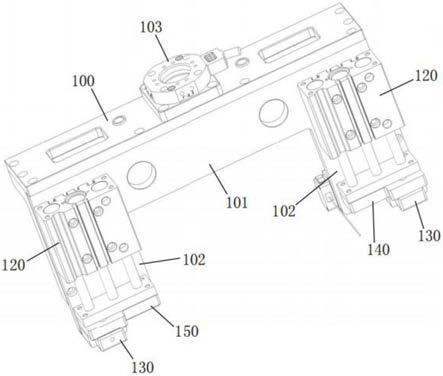
18.图1是本实用新型优选实施例中产品自动取放定位机构的结构示意图一;
19.图2是本实用新型优选实施例中产品自动取放定位机构的结构示意图二;
20.图3是本实用新型优选实施例中伸缩气缸和定位销的装配结构示意图;
21.图4是本实用新型优选实施例中定位块和定位套筒的装配结构示意图。
22.标记说明:100、本体;101、连接部;102、固定部;103、快换装置;110、定位销;120、伸缩气缸;130、定位块;131、通孔;132、螺丝孔;140、定位套筒;150、压块。
具体实施方式
23.下面结合附图和具体实施例对本实用新型作进一步说明,以使本领域的技术人员可以更好地理解本实用新型并能予以实施,但所举实施例不作为对本实用新型的限定。
24.如图1-4所示,为本实用新型优选实施例中的产品自动取放定位机构,可装配在机械手上,其包括本体100,所述本体100上设有用于相互配合对产品进行定位的两个定位组件,所述定位组件包括定位销110、驱动源,所述驱动源与所述定位销110连接;所述驱动源可驱动所述定位销110进入产品上的定位孔内,在夹取装置对产品进行夹取前对产品进行定位,并在产品取放过程中随夹取装置同步运动。
25.在一些实施例中,所述产品包括汽车仪表产品金属后盖等。本体100可通过快换装置103与机械手进行连接。
26.如图4所示,在一些实施例中,所述定位组件还包括定位块130,所述定位块130上设有与所述定位销110配合的通孔131,所述驱动源可驱动所述定位销110进入所述通孔131,并贯穿所述通孔131进入产品上的定位孔内。通孔131可对定位销110进行定位,保证定位销110运动的精度,保证定位销110准确插入产品上的定位孔内。
27.在一些实施例中,所述通孔131内设有与所述定位销110配合的定位套筒140。定位套筒140可以进一步提升定位销110的定位精度。
28.可选的,所述定位块130上设有螺丝孔132,所述螺丝孔132贯穿所述定位块130至所述通孔131内,螺丝可通过所述螺丝孔132将所述定位套筒140固定在所述通孔131内。可以有效保证定位套筒140的稳定性,同时方便更换。
29.可选的,所述定位块130与所述定位孔周围的形状匹配,避免定位块130与产品接触时对产品造成损伤,同时保证定位销110能够伸入产品上的定位孔内。
30.在一些实施例中,所述本体100包括两个对称的固定部102、连接两个固定部102的连接部101,所述连接部101和两个固定部102形成u型,两个定位组件分别装配于两个固定部102上。在两个固定部102之间即形成避让空间,方便对产品进行取放。可选的,所述连接
部101和两个固定部102一体成型,可由一整块板材切割而成。
31.可选的,所述驱动源包括伸缩气缸120,所述定位销110通过压块150与所述伸缩气缸120连接,定位销110固定在压块150上,参照图3。可选的,压块150可通过螺栓与伸缩气缸120连接。
32.可选的,所述定位销110的前端为锥形,便于插入产品上的定位孔内。
33.本实用新型优选实施例还公开了一种搬运机器人,其包括机械手,所述机械手上装配有如上述任一实施例中的产品自动取放定位机构。
34.本实用新型产品自动取放定位机构通过定位组件对产品进行定位,在机械手上的夹取装置对产品进行夹取前对产品进行定位,并在产品取放过程中随夹取装置同步运动,避免产品相对夹取装置运动,增加产品在搬运过程中的稳定性,可有效避免产品在搬运过程中出现损伤。
35.以上实施例仅是为充分说明本实用新型而所举的较佳的实施例,本实用新型的保护范围不限于此。本技术领域的技术人员在本实用新型基础上所作的等同替代或变换,均在本实用新型的保护范围之内。本实用新型的保护范围以权利要求书为准。
技术特征:
1.一种产品自动取放定位机构,可装配在机械手上,其特征在于,包括本体,所述本体上设有:用于相互配合对产品进行定位的两个定位组件,所述定位组件包括定位销、驱动源,所述驱动源与所述定位销连接;所述驱动源可驱动所述定位销进入产品上的定位孔内,在夹取装置对产品进行夹取前对产品进行定位,并在产品取放过程中随夹取装置同步运动。2.如权利要求1所述的产品自动取放定位机构,其特征在于,所述定位组件还包括定位块,所述定位块上设有与所述定位销配合的通孔,所述驱动源可驱动所述定位销进入所述通孔,并贯穿所述通孔进入产品上的定位孔内。3.如权利要求2所述的产品自动取放定位机构,其特征在于,所述通孔内设有与所述定位销配合的定位套筒。4.如权利要求3所述的产品自动取放定位机构,其特征在于,所述定位块上设有螺丝孔,所述螺丝孔贯穿所述定位块至所述通孔内,螺丝可通过所述螺丝孔将所述定位套筒固定在所述通孔内。5.如权利要求2所述的产品自动取放定位机构,其特征在于,所述定位块与所述定位孔周围的形状匹配。6.如权利要求1所述的产品自动取放定位机构,其特征在于,所述本体包括两个对称的固定部、连接两个固定部的连接部,所述连接部和两个固定部形成u型,两个定位组件分别装配于两个固定部上。7.如权利要求6所述的产品自动取放定位机构,其特征在于,所述连接部和两个固定部一体成型。8.如权利要求1所述的产品自动取放定位机构,其特征在于,所述驱动源包括伸缩气缸,所述定位销通过压块与所述伸缩气缸连接。9.如权利要求1所述的产品自动取放定位机构,其特征在于,所述定位销的前端为锥形。10.一种搬运机器人,包括机械手,其特征在于,所述机械手上装配有如权利要求1-9任一所述的产品自动取放定位机构。
技术总结
本实用新型公开了一种产品自动取放定位机构及搬运机器人,可装配在机械手上,其包括本体,本体上设有用于相互配合对产品进行定位的两个定位组件,定位组件包括定位销、驱动源,驱动源与定位销连接;驱动源可驱动定位销进入产品上的定位孔内,在夹取装置对产品进行夹取前对产品进行定位,并在产品取放过程中随夹取装置同步运动。本实用新型产品自动取放定位机构通过定位组件对产品进行定位,在机械手上的夹取装置对产品进行夹取前对产品进行定位,并在产品取放过程中随夹取装置同步运动,避免产品相对夹取装置运动,增加产品在搬运过程中的稳定性,可有效避免产品在搬运过程中出现损伤。伤。伤。
技术研发人员:苏军义 张彪 梁雨鑫
受保护的技术使用者:上海精杰机电技术有限公司
技术研发日:2021.07.08
技术公布日:2022/2/7
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1