一种手机内置摄像头拆解机械手的末端执行器的制作方法
1.本实用新型涉及手机拆卸设备技术领域,特别涉及一种手机内置摄像头拆解机械手的末端执行器。
背景技术:
2.手机内置摄像头是指安装在手机内部的摄像头,可进行拍摄静态图片或短片拍摄。手机内置摄像头通常被放置在方形保护壳内,保护壳通过fpc排线与主板相连。由于手机内部空间的限制,手机内置摄像头尺寸较小,并且与手机内部的其他元器件的间隙也较小。因此,采用机械手拆解手机内置摄像头时需要设计一种专用的机械手末端执行器。
3.专利zl201820563623.3设计了一种夹持式半导体机械手末端执行器,通过手指型的机械手末端执行器夹持晶圆边缘实现了晶圆的搬运。
4.专利zl201821644671.1设计了一种抓取伞齿轮的机械手末端执行器,提供气缸驱动四个抓取手指实现了伞齿轮的抓取搬运。
5.但是该实用新型仍有不足之处,夹持晶圆时,摩擦力补足,从而造成晶圆脱落,其次夹持晶圆的成功率不高,从而造成夹持晶圆效率不高。
技术实现要素:
6.本实用新型的主要目的在于提供一种手机内置摄像头拆解机械手的末端执行器,可以有效解决背景技术中的问题。
7.为实现上述目的,本实用新型采取的技术方案为:
8.一种手机内置摄像头拆解机械手的末端执行器,包括机械手、连接件、气缸、安装座、吸盘组件和夹爪,所述机械手安装在设备底板上,所述连接件包括圆形块、圆柱块、矩形块。
9.优选的,所述圆形块的一端与机械手的一端固定连接,所述圆柱块的一端与圆形块的另一端固定连接,所述圆柱块的另一端与矩形块的一端固定连接。
10.优选的,所述矩形块的上端与气缸的内侧顶部固定连接,所述安装座包括矩形板、圆柱形凸台、螺纹孔。
11.优选的,所述矩形板一端与矩形块的另一端固定连接,所述矩形板的下端与气缸的内侧底部固定连接,所述矩形板的另一端与圆柱形凸台的一端固定连接,所述圆柱形凸台的内部开设有螺纹孔。
12.优选的,所述吸盘组件的外侧与螺纹孔的内侧螺纹连接,所述吸盘组件的外侧部分与螺纹孔螺纹连接。
13.优选的,所述夹爪上端开设有圆孔,所述夹爪的下端固定设置有锯齿,所述夹爪的数量有两组,两组所述夹爪位于气缸的上下两端处,两组所述夹爪均为梯形结构。
14.与现有技术相比,本实用新型具有如下有益效果:
15.1、通过夹爪下端有锯齿从而使得在锯齿贴紧手机内置摄像头并且使得通过锯齿
的作用下,可以达到增加摩擦力的目的。
16.2、通过夹爪的夹持和吸盘组件吸附双重作用,增加了手机内置摄像头自动化拆解的成功率。
附图说明
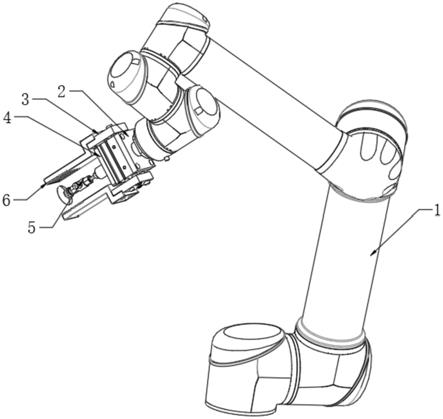
17.图1为本实用新型一种手机内置摄像头拆解机械手的末端执行器的整体结构示意图;
18.图2为本实用新型一种手机内置摄像头拆解机械手的末端执行器的连接件结构示意图;
19.图3为本实用新型一种手机内置摄像头拆解机械手的末端执行器的安装座结构示意图;
20.图4为本实用新型一种手机内置摄像头拆解机械手的末端执行器的夹爪结构示意图。
21.图中:1、机械手;2、连接件;21、圆形块;22、圆柱块;23、矩形块;3、气缸;4、安装座;41、矩形板;42、圆柱形凸台;43、螺纹孔;5、吸盘组件;6、夹爪;61、圆孔;62、锯齿。
具体实施方式
22.为使本实用新型实现的技术手段、创作特征、达成目的与功效易于明白了解,下面结合具体实施方式,进一步阐述本实用新型。
23.如图1-4所示,一种手机内置摄像头拆解机械手的末端执行器,包括机械手1、连接件2、气缸3、安装座4、吸盘组件5和夹爪6,机械手1安装在设备底板上,连接件2包括圆形块21、圆柱块22、矩形块23。
24.本实施例中,圆形块21的一端与机械手1的一端固定连接,圆柱块22的一端与圆形块21的另一端固定连接,圆柱块22的另一端与矩形块23的一端固定连接,矩形块23的上端与气缸3的内侧顶部固定连接,安装座4包括矩形板41、圆柱形凸台42、螺纹孔43,矩形板41一端与矩形块23的另一端固定连接,矩形板41的下端与气缸3的内侧底部固定连接,矩形板41的另一端与圆柱形凸台42的一端固定连接,圆柱形凸台42的内部开设有螺纹孔43。
25.具体的,由于吸盘组件5为缓冲性吸盘,并且吸盘组件5的前端吸盘部分可自动调节上下位移,而且吸盘组件5尾部安装于安装座4的螺纹孔43内,从而使得吸盘组件5吸住摄像头上部,机械手1往上运动将摄像头从手机内部移除,通过在夹爪6上设置锯齿62,可以达到增加了夹持的摩擦力,其次通过夹爪6的夹持和吸盘组件5吸附双重作用,增加了手机内置摄像头自动化拆解的成功率。
26.本实施例中,吸盘组件5的外侧与螺纹孔43的内侧螺纹连接,吸盘组件5的外侧部分与螺纹孔43螺纹连接,夹爪6上端开设有圆孔61,夹爪6的下端固定设置有锯齿62,夹爪6的数量有两组,两组夹爪6位于气缸3的上下两端处,两组夹爪6均为梯形结构。
27.具体的,通过机械手1在机器视觉系统的引导下接近手机内置摄像头,然后启动气缸3,使得气缸3驱动两组夹爪6闭合,从而使得两组夹爪6夹住摄像头,由于夹爪6下端有锯齿62,使得在锯齿62贴紧手机内置摄像头,从而使得通过锯齿62的作用下,可以达到增加摩擦力的目的。
28.工作原理:
29.使用时,通过机械手1在机器视觉系统的引导下接近手机内置摄像头,然后启动气缸3,使得气缸3驱动两组夹爪6闭合,从而使得两组夹爪6夹住摄像头,由于夹爪6下端有锯齿62,使得在锯齿62贴紧手机内置摄像头,从而使得通过锯齿62的作用下,可以达到增加摩擦力的目的,由于吸盘组件5为缓冲性吸盘,并且吸盘组件5的前端吸盘部分可自动调节上下位移,而且吸盘组件5尾部安装于安装座4的螺纹孔43内,从而使得吸盘组件5吸住摄像头上部,机械手1往上运动将摄像头从手机内部移除,通过在夹爪6上设置锯齿62,可以达到增加了夹持的摩擦力,其次通过夹爪6的夹持和吸盘组件5吸附双重作用,增加了手机内置摄像头自动化拆解的成功率。
30.以上显示和描述了本实用新型的基本原理和主要特征和本实用新型的优点。本行业的技术人员应该了解,本实用新型不受上述实施例的限制,上述实施例和说明书中描述的只是说明本实用新型的原理,在不脱离本实用新型精神和范围的前提下,本实用新型还会有各种变化和改进,这些变化和改进都落入要求保护的本实用新型范围内。本实用新型要求保护范围由所附的权利要求书及其等效物界定。
技术特征:
1.一种手机内置摄像头拆解机械手的末端执行器,包括机械手(1)、连接件(2)、气缸(3)、安装座(4)、吸盘组件(5)和夹爪(6),其特征在于:所述机械手(1)安装在设备底板上,所述连接件(2)包括圆形块(21)、圆柱块(22)、矩形块(23)。2.根据权利要求1所述的一种手机内置摄像头拆解机械手的末端执行器,其特征在于:所述圆形块(21)的一端与机械手(1)的一端固定连接,所述圆柱块(22)的一端与圆形块(21)的另一端固定连接,所述圆柱块(22)的另一端与矩形块(23)的一端固定连接。3.根据权利要求1所述的一种手机内置摄像头拆解机械手的末端执行器,其特征在于:所述矩形块(23)的上端与气缸(3)的内侧顶部固定连接,所述安装座(4)包括矩形板(41)、圆柱形凸台(42)、螺纹孔(43)。4.根据权利要求3所述的一种手机内置摄像头拆解机械手的末端执行器,其特征在于:所述矩形板(41)一端与矩形块(23)的另一端固定连接,所述矩形板(41)的下端与气缸(3)的内侧底部固定连接,所述矩形板(41)的另一端与圆柱形凸台(42)的一端固定连接,所述圆柱形凸台(42)的内部开设有螺纹孔(43)。5.根据权利要求4所述的一种手机内置摄像头拆解机械手的末端执行器,其特征在于:所述吸盘组件(5)的外侧与螺纹孔(43)的内侧螺纹连接,所述吸盘组件(5)的外侧部分与螺纹孔(43)螺纹连接。6.根据权利要求1所述的一种手机内置摄像头拆解机械手的末端执行器,其特征在于:所述夹爪(6)上端开设有圆孔(61),所述夹爪(6)的下端固定设置有锯齿(62),所述夹爪(6)的数量有两组,两组所述夹爪(6)位于气缸(3)的上下两端处,两组所述夹爪(6)均为梯形结构。
技术总结
本实用新型公开了一种手机内置摄像头拆解机械手的末端执行器,包括机械手、连接件、气缸、安装座、吸盘组件和夹爪,所述机械手安装在设备底板上,所述连接件包括圆形块、圆柱块、矩形块。本实用新型所述的一种手机内置摄像头拆解机械手的末端执行器,通过夹爪下端有锯齿从而使得在锯齿贴紧手机内置摄像头并且使得通过锯齿的作用下,可以达到增加摩擦力的目的,通过夹爪的夹持和吸盘组件吸附双重作用,增加了手机内置摄像头自动化拆解的成功率。了手机内置摄像头自动化拆解的成功率。了手机内置摄像头自动化拆解的成功率。
技术研发人员:周丹妮 章志强 刘传香
受保护的技术使用者:深圳明京环境科技有限公司
技术研发日:2021.08.03
技术公布日:2022/1/7
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1